TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025018873
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023185163
出願日
2023-10-30
発明の名称
流量制御装置
出願人
コフロック株式会社
代理人
個人
主分類
G05D
7/06 20060101AFI20250130BHJP(制御;調整)
要約
【課題】瞬時の供給圧変動に対しても安定した流量制御を行う機能を有する流量制御装置を提供する。
【解決手段】流量設定値と流量測定値との差である偏差が一定以内である期間を定常期間とし、それ以外の期間を変化期間とした場合、流量センサ部3が受ける外的要因によって、前記定常期間中に流量センサ部3が出力する流量測定信号が上昇方向又は下降方向に一定以上変化したとき、流量制御バルブ部4の現在の開度制御信号の変化後の新たな開度制御信号は、流量制御バルブ部4の現在の開度制御信号に対して、ゼロを除く適宜定められる係数に流量設定値と流量測定値との差である偏差を乗算した結果得られるものを、流量設定値と流量測定値との差である偏差を微分したものの絶対値にゼロを除く適宜定められる係数を乗算した結果得られるものにゼロを除く実数を加算することによって得られるもので除算したものを加算することによって得られる。
【選択図】図1
特許請求の範囲
【請求項1】
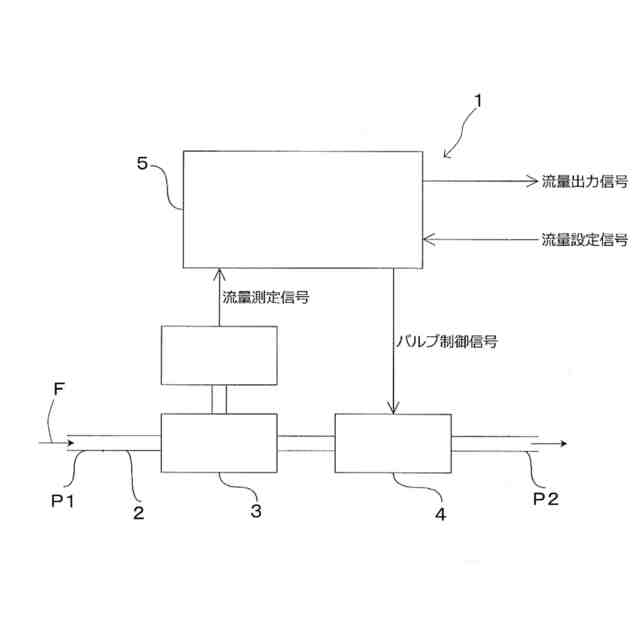
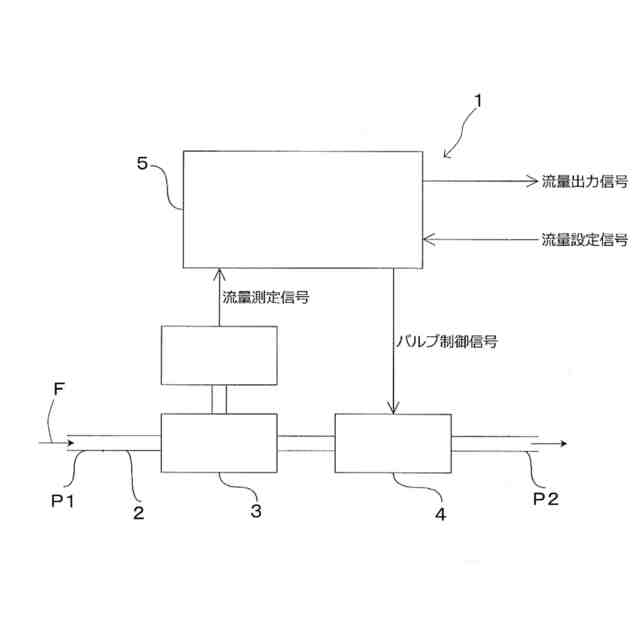
流路内を流れる流体の流量を測定し、その流量測定値を示す流量測定信号を出力する流量センサ部と、
前記流量センサ部の上流側または下流側に設けた流量制御バルブ部と、
前記流量測定信号の示す流量測定値と目標値である流量設定値とをパラメータとして含む算出式から前記流量制御バルブ部の開度制御信号を算出して出力する制御部とを備えた流量制御装置において、
前記流量設定値と流量測定値との差である偏差が一定以内である期間を定常期間とし、それ以外の期間を変化期間とした場合、
前記流量センサ部が受ける外的要因によって、前記定常期間中に前記流量センサ部が出力する流量測定信号が上昇方向又は下降方向に一定以上変化したとき、
流量制御バルブ部の現在の開度制御信号の変化後の新たな開度制御信号は、流量制御バルブ部の現在の開度制御信号に対して、ゼロを除く適宜定められる係数に流量設定値と流量測定値との差である偏差を乗算した結果得られるものを、流量設定値と流量測定値との差である偏差を微分したものの絶対値にゼロを除く適宜定められる係数を乗算した結果得られるものにゼロを除く実数を加算することによって得られるもので除算したものを加算することによって得られることを特徴とする流量制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ガスや液体等の流体の流量を制御する流量制御装置に関し、特に、供給圧力の変動などの外的要因に対しても安定した流量制御を行う機能を備えた流量制御装置に関するものである。近年のガスパネルでは同種ガスを複数ラインへ分岐するデザインが採用されている。このため、ガス流量制御を行う流量制御装置間のクロストーク現象やレギュレータ特性により供給圧力が瞬時に変動する現象が生じる。本発明は、この瞬時の供給圧変動などの外的要因に対しても安定した流量制御を行う機能を備えた流量制御装置に関するものである。
続きを表示(約 4,400 文字)
【背景技術】
【0002】
例えば、半導体の製造に用いられる各種ガス等を半導体製造装置に供給する場合、それらの供給流路に流量制御装置をそれぞれ設け、これによってそれぞれのガス流量を調節するようにしている。そして従前は、各流量制御装置にそれぞれ圧力レギュレータを直列に付帯させ、各流量制御装置の流路内圧力に極端な変動が生じないようにして、流量制御を容易にしている。
【0003】
前記流量制御装置における流量制御方式としては、PID制御が基本であるが、例えば、特許文献1に示すように、過渡的な応答状態と安定状態とでPID係数を切り替えてフィードバック制御を行うようにしたものが知られている。
【0004】
具体的に特許文献1に示すものは、比例演算における偏差に乗算するゲイン値として、流量設定値を所定の関数に代入して得られる値を用いており、例えば安定状態において用いられる前記所定の関数は、代入される流量設定値が小さくなれば小さな値が算出されるものである。つまり、特許文献1に示す従来のマスフローコントローラは、安定状態での比例係数、積分係数及び微分係数を流量設定値のみに比例させて変更するだけである。
【0005】
また、特許文献2には、「圧力センサにて発生した圧力測定信号を取得すること、流量センサにて発生した流量センサ信号を取得すること、前記圧力測定信号を用いて推定寄生流量信号を生成すること、前記流量センサ信号を加速して、前記推定寄生流量信号と同等な帯域幅を有する加速された流量センサ信号を生成すること、並びに、前記加速された流量センサ信号及び前記推定寄生流量信号を用いて、マスフローコントローラを制御するために、補正流量信号を生成することを有する、マスフローコントローラにおける流体の寄生流量を補正する方法。」が記載されている。この特許文献2に記載された方法は、単に寄生流量を補正するだけであって、瞬時の供給圧変動などに対して安定した流量制御を行う機能を備えていない。
【0006】
また、特許文献3には、「圧力センサにより生成された前記流体の圧力測定値を受け付け、前記流体の圧力変化率が閾条件を満たしていることに応答して、流量の測定値と流量の設定値との間の差異に基づいて前記マスフローコントローラの弁を制御するフィードバック制御ループを休止させ、前記フィードバック制御ループが休止したときの圧力測定値と、前記マスフローコントローラにおける流量、圧力及び弁位置の間の応答特性を表す特性データとに基づいて、前記弁の弁位置を計算し、ある期間の経過後、又は前記閾条件が再度満たされた後、流量の測定値が飽和していない場合に、前記フィードバック制御ループを再動作させ、前記フィードバック制御ループが最初に再動作したときに、流量の測定値と流量の設定値との差異を決定し、前記フィードバック制御ループが再度休止したときの前記弁位置の計算の正確さを向上させるために、前記差異に基づいて前記特性データの調整を行うことを特徴とする、マスフローコントローラを用いて流体の質量流量を制御する方法。」が記載されている。この特許文献3に記載された方法は、マルチモード制御アルゴリズムを使用して流体の流量を制御する方法であるが、システムが煩雑である。
【0007】
また、特許文献4には、「流路内を流れる流体の流量を測定し、その測定値を示す流量測定信号を出力する流量センサ部と、その流量センサ部の上流側又は下流側に設けた流量制御バルブと、前記流量制御バルブへの制御値を算出する算出部と、を備えたものであって、マスフローコントローラの上流側における前記流体の圧力の測定値である一次側圧力測定値が所定量以上変化した期間である変化期間と、それ以外の期間である安定期間と、において、前記算出部は、前記安定期間では、前記流量測定信号の示す流量測定値と目標値である流量設定値との偏差に所定の演算処理を施して安定時制御値を算出し、前記変化期間では、前記一次側圧力測定値と前記一次側圧力測定値の変化量とに所定の演算処理を施して変化時制御値を算出する、マスフローコントローラ。」が記載されている。この特許文献4に記載されたマスフローコントローラは、安定期間と変化期間とで制御を切り替えて、一次側の圧力が急激に変動した場合は、一次側圧力測定値と一次側圧力測定値の変化量とに基づいて制御を行うので、クロストークが生じるようなシステムには採用できるが、瞬時の供給圧変動などに対して安定した流量制御を行う機能を備えているとは言えない。
【0008】
また、特許文献5には、「流路内を流れる流体の流量を測定し、その測定値を示す流量測定信号を出力する流量センサ部と、当該流量センサ部の上流側又は下流側に設けた流量制御バルブと、前記流量測定信号の示す流量測定値と目標値である流量設定値との偏差にPID演算を施して流量制御バルブへのフィードバック制御値を算出する算出部と、前記フィードバック制御値に基づいて開度制御信号を生成し、流量制御バルブに出力する開度制御信号出力部と、を備え、前記算出部が、安定状態におけるPID演算に用いる比例係数、積分係数及び微分係数を、一次側圧力又は流量設定値の少なくとも1つと、前記一次側圧力の時間変化量と、に基づいて変更することを特徴とするマスフローコントローラ。」が記載されている。この特許文献5に記載されたマスフローコントローラは、フィードバック制御値を算出する算出部を、安定状態におけるPID演算に用いる比例係数、積分係数及び微分係数を、一次側圧力又は流量設定値の少なくとも1つと、前記一次側圧力の時間変化量と、に基づいて変更することを特徴としている。その段落0030から0035には、制御値算出部72は、一次側圧力の時間変化量が正の場合(一次側圧力上昇時)、PID係数を以下のように変更している。
P′=P×Fu(set)
I′=I×Fu(set)
D′=D×Fu(set)
前記Fu(set)は流量設定値に固有の関数である設定係数関数であるが、演算処理の簡略化を図るために、0-50%の比例定数と50-100%の比例定数とが異なる折れ線形状の折れ線関数が採用されている。次に、制御値算出部72は、P′I′D′係数を一次側圧力に基づいて以下のように変更している。
P″=P′×Gu(set)
I″=I′×Gu(set)
D″=D′×Gu(set)
前記Gu(set)は一次側圧力に固有の関数である圧力係数関数であるが、演算処理の簡略化を図るために、入力される一次側圧力に比例した比例関数が採用されている。
このように、特許文献5に記載された発明を具体的に実施するためには、流量設定値及び一次側圧力に基づいて、P、I、DをP″、I″、D″に変更し、当該P″、I″、D″を用いて偏差にPID演算を施してフィードバック制御値を算出する必要があり、前記折れ線関数や比例関数が用いられる結果、精度を向上することが困難である。
【0009】
また、特許文献6には、「流路内を流れる流体の流量を測定し、その測定値を示す流量測定信号を出力する流量センサ部と、その流量センサ部の上流側または下流側に設けた流量制御バルブと、前記流量測定信号の示す流量測定値と目標値である流量設定値とをパラメータとして少なくとも含んだ所定の算出式から流量制御バルブの開度制御信号を算出し出力する制御部と、前記流量センサ部の上流側又は下流側における前記流体の圧力を検知し、その圧力値を示す圧力検知信号を出力する圧力センサ部と、を備え、前記制御部が、前記流量設定値を所定量以上変化させた時点からの所定期間である変化期間と、それ以外の期間である安定期間とにおいて、前記算出式を互いに異ならせるとともに、少なくとも前記安定期間において、前記算出式のパラメータとして、前記圧力値がさらに含まれるようにしているマスフローコントローラ。」が記載されている。その段落0009には、「そこで本発明は、流量設定値の変化に対する追随速度を犠牲にすることなく、クロストークなどにより圧力変動が生じても流量変動を抑制できるマスフローコントローラを提供することをその主たる課題としたものである。」と記載されている。しかし、変化期間と安定期間とにおいて、流量制御バルブの開度制御信号を算出する算出式をどのように互いに異ならせれば、前記課題を解決することができるのか理解できない。
【0010】
さらに、特許文献7には、「流路内を流れる流体の流量を測定し、その測定値を示す流量測定信号を出力する流量センサ部と、当該流量センサ部の上流側又は下流側に設けた流量制御バルブと、前記流量測定信号の示す流量測定値と目標値である流量設定値との偏差にPID演算を施して流量制御バルブへのフィードバック制御値を算出する算出部と、前記フィードバック制御値に基づいて開度制御信号を生成し、流量制御バルブに出力する開度制御信号出力部と、を備え、前記算出部が、安定状態におけるPID演算に用いる比例係数、積分係数及び微分係数を、一次側圧力、当該一次側圧力の時間変化量、又は前記流量設定値の少なくとも2つに基づいて変更させるように構成されており、前記算出部が、一次側圧力の時間変化量の正負によって、流量設定値に固有の関数、又は、一次側圧力に固有の関数を異ならせることにより比例係数、積分係数及び微分係数を変更するものであることを特徴とするマスフローコントローラ。」が記載されている。この特許文献7に記載されたマスフローコントローラは、フィードバック制御値を算出する算出部を、安定状態におけるPID演算に用いる比例係数、積分係数及び微分係数を、一次側圧力、当該一次側圧力の時間変化量、又は前記流量設定値の少なくとも2つに基づいて変更させるように構成されており、前記算出部が、一次側圧力の時間変化量の正負によって、流量設定値に固有の関数、又は、一次側圧力に固有の関数を異ならせることにより比例係数、積分係数及び微分係数を変更するものであることを特徴としている。そして、特許文献7に記載された発明を具体的に実施するためには、特許文献5と同様に、流量設定値及び一次側圧力に基づいて、P、I、DをP″、I″、D″に変更し、当該P″、I″、D″を用いて偏差にPID演算を施してフィードバック制御値を算出する必要があり、前記折れ線関数や比例関数が用いられる結果、精度を向上することが困難である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
5日前
和研工業株式会社
多連レバー機構
18日前
スター精密株式会社
工作機械
1か月前
株式会社クボタ
作業車
8日前
株式会社ダイフク
搬送車
8日前
ローム株式会社
半導体集積回路
13日前
エイブリック株式会社
ボルテージレギュレータ
5日前
トヨタ自動車株式会社
工作機械の制御装置
6日前
トヨタ自動車株式会社
工作機械の制御装置
7日前
株式会社ダイフク
物品搬送設備
6日前
愛知機械テクノシステム株式会社
無人搬送車
27日前
アズビル株式会社
制御システムおよび制御方法
19日前
アズビル株式会社
制御システムおよび制御方法
19日前
アズビル株式会社
制御システムおよび制御方法
28日前
トヨタ自動車株式会社
自律走行装置
1か月前
日本精工株式会社
制御装置および制御方法
25日前
チームラボ株式会社
走行システム及び走行路
1か月前
株式会社ダイヘン
搬送車
5日前
株式会社ダイヘン
搬送車
5日前
株式会社ダイヘン
搬送車
5日前
株式会社ダイヘン
搬送車
5日前
トヨタ自動車株式会社
群制御システム及び群制御方法
27日前
村田機械株式会社
稼働監視システム及び稼働監視方法
28日前
日本精工株式会社
制御システムおよび制御方法
1か月前
ローム株式会社
半導体装置
1か月前
ミツミ電機株式会社
電源回路及びその起動方法
1か月前
井関農機株式会社
作業車両
1日前
ミツミ電機株式会社
多方向入力装置
11日前
ローム株式会社
バイアス回路
7日前
ミツミ電機株式会社
多方向入力装置
11日前
ミツミ電機株式会社
多方向入力装置
11日前
ミツミ電機株式会社
多方向入力装置
11日前
ミツミ電機株式会社
多方向入力装置
25日前
オルガノ株式会社
運転管理方法及び運転管理装置
8日前
ミツミ電機株式会社
多方向入力装置
25日前
ミツミ電機株式会社
多方向入力装置
25日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































