TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025026776
公報種別
公開特許公報(A)
公開日
2025-02-25
出願番号
2023131712
出願日
2023-08-11
発明の名称
搬送ロボット
出願人
株式会社シンテックホズミ
代理人
個人
主分類
G05D
1/43 20240101AFI20250217BHJP(制御;調整)
要約
【課題】当該エリアとしてのあるエリアとレイアウトが近似する他のエリアを走行する際に、レイアウト変更の進捗が異なっても、他のエリアを走行する際に、当該エリアの地図データを利用することにより、他のエリアのレイアウトにマッチした地図データを使用することができる搬送ロボットを提供する。
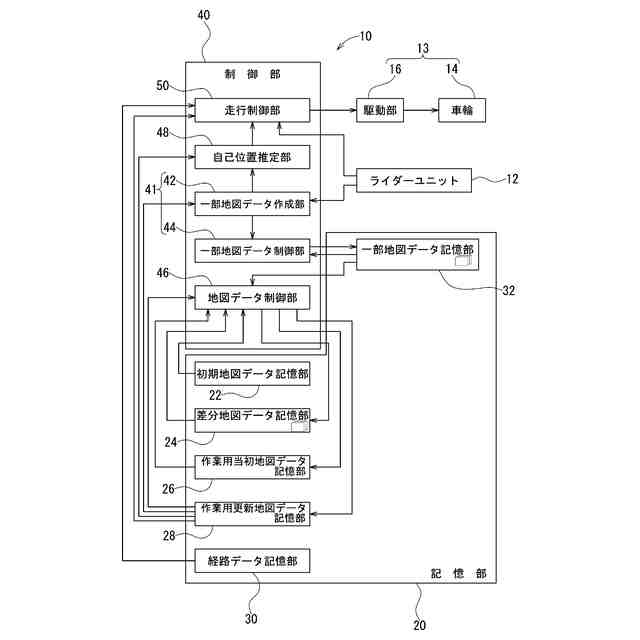
【解決手段】搬送ロボットの走行中には、地図データ制御部46は、一部地図データを作業用更新地図データに追加して、作業用更新地図データを更新していき、走行終了時には、作業用更新地図データと作業用当初地図データの差分である差分地図データを走行ごとに差分地図データ記憶部24に記憶する。次の走行の開始時には、初期地図データ記憶部22に記憶された初期地図データに差分地図データ記憶部24に記憶された差分地図データを追加した地図データを作業用当初地図データ及び作業用更新地図データとする。
【選択図】図1
特許請求の範囲
【請求項1】
自律走行して物品を搬送する搬送ロボットであって、
搬送ロボットが走行するエリアの2次元点群データである初期地図データを記憶する初期地図データ記憶部(22)と、
差分地図データを記憶するための差分地図データ記憶部(24)と、
作業用当初地図データを記憶するための作業用当初地図データ記憶部(26)と、
作業用更新地図データを記憶するための作業用更新地図データ記憶部(28)と、
経路データを記憶する経路データ記憶部(30)と、
一部地図データを記憶するための一部地図データ記憶部(32)と、
車輪(14)と車輪を駆動する駆動部(16)とを有する駆動ユニット(13)と、
レーザー光を2次元方向に走査するとともに反射光を受光し、距離と方向のデータからなるライダーデータを出力するライダーユニット(12)と、
ライダーユニットからのライダーデータに基づき2次元点群データからなる一部地図データを作成し、作成した一部地図データを一部地図データ記憶部に記憶する一部地図データ作成制御部(41)と、
一部地図データ作成制御部により作成された一部地図データと、作業用更新地図データ記憶部に記憶されている作業用更新地図データとから自己位置を推定する自己位置推定部(48)と、
自己位置推定部により推定された自己位置のデータと、経路データ記憶部に記憶された経路データと、作業用更新地図データ記憶部に記憶された作業用更新地図データとにより駆動ユニットの動作を制御する走行制御部(50)と、
地図データ制御部(46)と、を有し、
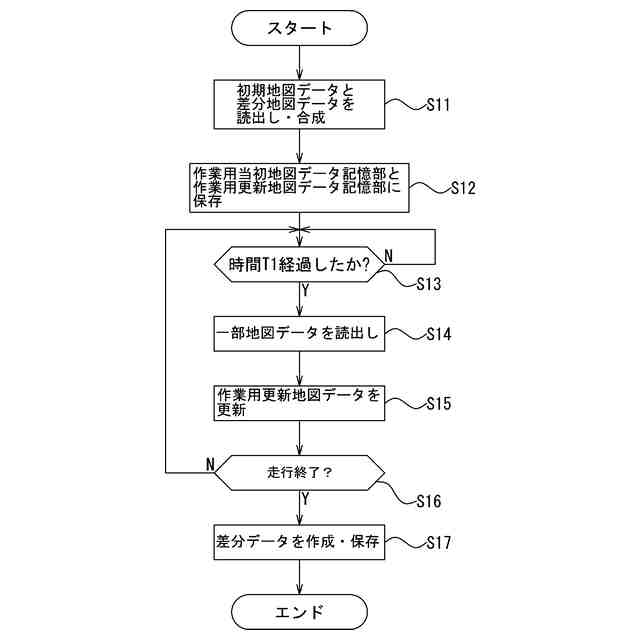
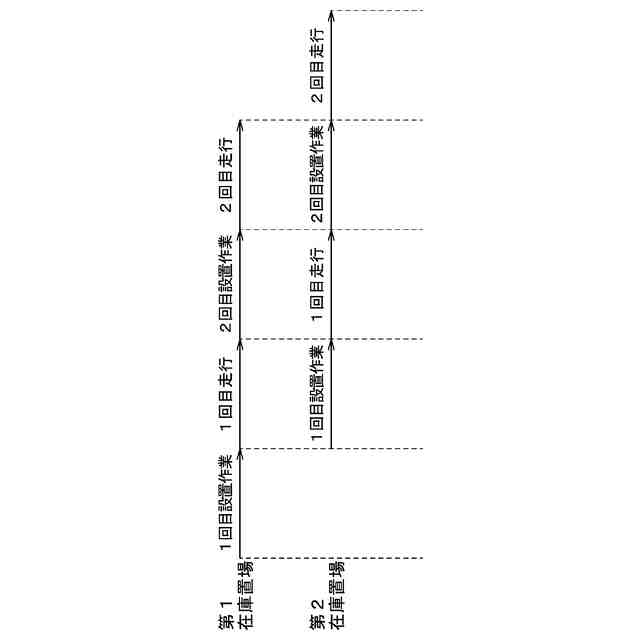
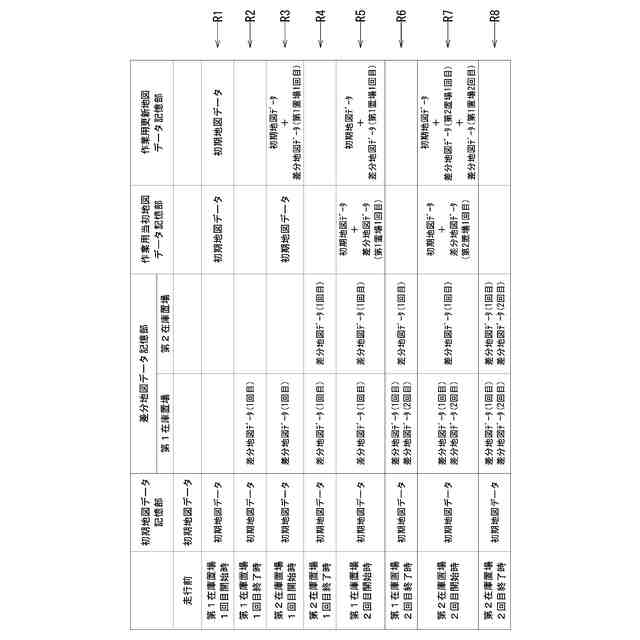
搬送ロボットの走行開始時には、地図データ制御部は、初期地図データ記憶部に記憶された初期地図データに差分地図データ記憶部に記憶された差分地図データを追加したデータである合成地図データを作業用当初地図データとして作業用当初地図データ記憶部に記憶するとともに、該合成地図データを作業用更新地図データとして作業用更新地図データ記憶部に記憶し、
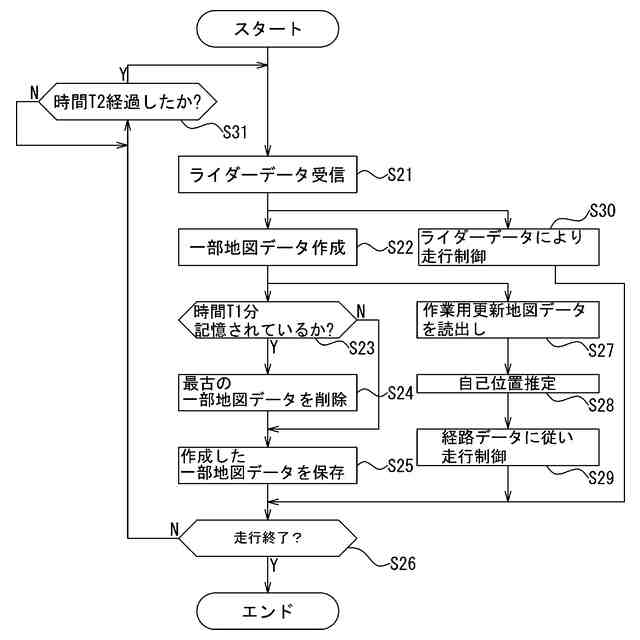
搬送ロボットの走行中には、一部地図データ作成制御部が、予め定められた時間である第1の時間(T2)ごとに、一部地図データを一部地図データ記憶部に記憶するとともに、地図データ制御部は、予め定められた時間である第2の時間であって第1の時間よりも長い時間である第2の時間(T1)ごとに、一部地図データ記憶部から一部地図データを読み出し、作業用更新地図データに記憶された作業用更新地図データに該一部地図データを追加することにより、作業用更新地図データを更新し、
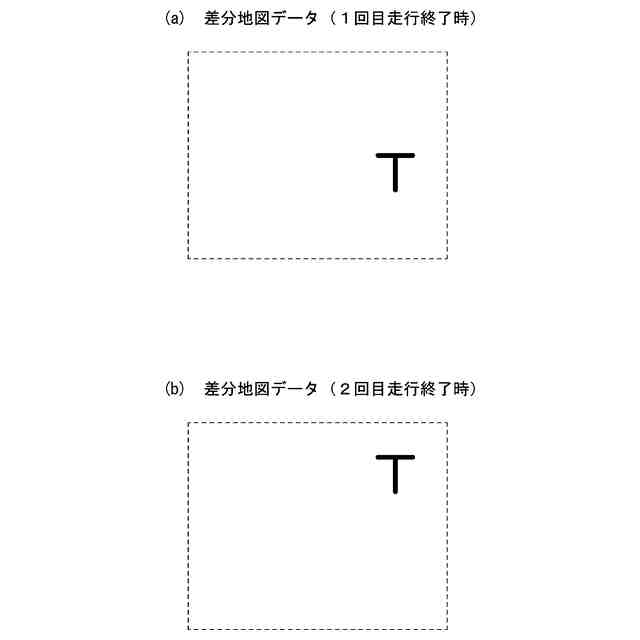
搬送ロボットの走行終了時には、地図データ制御部は、作業用更新地図データ記憶部に記憶された作業用更新地図データと作業用当初地図データ記憶部に記憶された作業用当初地図データの差分である差分地図データを作成して、差分地図データ記憶部に記憶し、地図データ制御部は、各走行ごとに差分地図データを差分地図データ記憶部に記憶することを特徴とする搬送ロボット。
続きを表示(約 660 文字)
【請求項2】
一部地図データ作成制御部は、一部地図データ作成部(42)と、一部地図データ制御部(44)とを有し、
一部地図データ作成部は、ライダーユニットからのライダーデータに基づいて一部地図データを作成し、
一部地図データ制御部は、作成された一部地図データを一部地図データ記憶部に記憶し、一部地図データ記憶部にすでに第2の時間分の一部地図データが記憶されている場合には、一部地図データ記憶部に記憶されている一部地図データのうち、最も古い一部地図データを削除した上で、作成された一部地図データを記憶することを特徴とする請求項1に記載の搬送ロボット。
【請求項3】
搬送ロボットには、差分地図データ記憶部に記憶されている差分地図データを特定する特定情報を差分地図データごとに表示する表示手段(60)と、表示手段に表示された特定情報において、1又は複数の特定情報を選択するとともに、選択された特定情報により特定される差分地図データの追加または削除を指示する入力手段が(70)設けられ、
搬送ロボットの走行開始時に、特定情報が表示手段に表示されている状態で、入力手段により、特定情報の選択と選択された特定情報により特定される差分地図データの追加又は削除を指示することにより、地図データ制御部は、作業用更新地図データ記憶部に記憶する作業用更新地図データに対して、選択された特定情報により特定される差分地図データを追加又は削除することを特徴とする請求項1又は2に記載の搬送ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行する搬送ロボットに関するものであり、特に、工場等において利用される無人搬送車(AMR:Autonomous Mobile Robot)等の自走式の搬送ロボットに関するものである。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来における自走式の搬送ロボットを備える搬送システムとして、特許文献1に示す搬送システムが存在する。
【0003】
搬送システム1は、制御装置10と搬送ロボット20を有し、制御装置10は、マップデータを記憶するマスタ記憶部16と、搬送指示とマップデータに基づいて、搬送ロボット20による搬送対象物の搬送元から搬送先までの搬送経路を決定する搬送経路決定部14等を有し、搬送ロボット20は、制御装置10との間で通信を行うための通信インターフェースであるスレーブ通信部21と、走行制御部22と、環境センサ26と、環境センサ26が計測した計測結果を取得する環境情報取得部27と、スレーブ記憶部28を有している。
【0004】
そして、制御装置10は、搬送ロボット26から環境センサ26の計測結果を取得すると、搬送経路決定部14が、取得した計測結果をもとにマスタ記憶部16に記憶されているマップデータを更新する。すなわち、マップデータにおける環境パラメタ情報や障害物情報を更新する。
【0005】
具体的には、走行制御部22は、距離センサ24のスキャンデータを取得し、各パーティクルの姿勢位置において、スキャンデータを位置変換し、位置変換後のスキャンデータを蓄積されたマップデータの対応関係から局所的な局所マップデータに変換して生成する。
【0006】
そして、走行制御部22は、最尤度のパーティクルを当該搬送ロボット20の現在の位置姿勢として更新し、局所マップデータもエリア全体のマップデータに更新する。そして、走行制御部22は、スレーブ通信部21を通じて障害物情報を含んだ更新したマップデータを制御装置10に送信する。その際、走行制御部22は、環境センサ26により環境情報取得部27が取得した環境パラメタの値を、現在の位置に紐づけて制御装置10に送信する。この結果、制御装置10では、マスタ記憶部16に障害物情報及び環境パラメタ情報が更新されたマップデータに変更されて記憶される。
【先行技術文献】
【特許文献】
【0007】
特開2022-139772号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
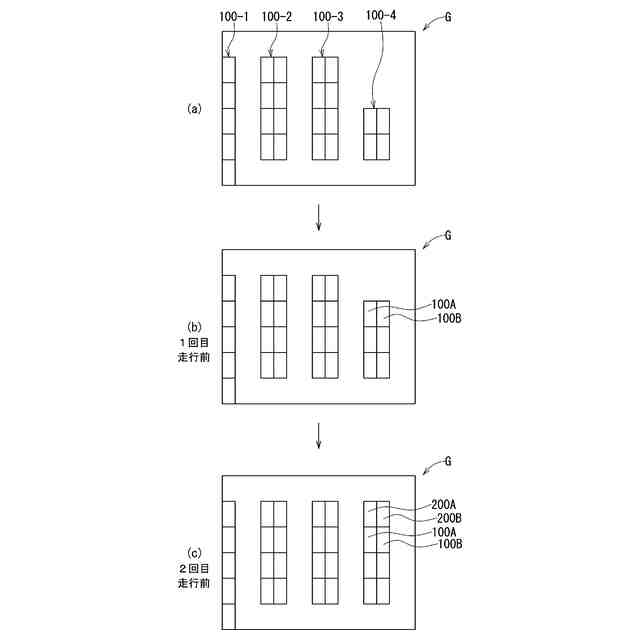
しかし、例えば、工場建屋内の別のエリアにおいて、エリア内のレイアウト(例えば、棚などの装置の配置や製造ラインを構成する装置の配置)が近似する場合に、該エリア内のレイアウトの変更状況が複数のエリアの間で同様の場合には、あるエリア(当該エリア)において更新されたマップデータを他のエリアにおいても利用することが可能であるが、複数のエリアにおいて、レイアウト変更の進捗状況が異なる場合に、あるエリアにおいて更新されたマップデータを更新の進捗が遅れている他のエリア(エリアAとする)に適用すると、該エリアAのレイアウトと更新されたマップデータがマッチせず、更新されたマップデータを利用することができないという問題がある。つまり、当該エリアとレイアウトが近似する他のエリアを走行する際に、レイアウト変更の進捗によっては、当該エリアのマップデータを利用できない。エリアAのレイアウトにマッチしたマップデータを使用できれば、自己位置を見失うおそれを低下させることができる。
【0009】
そこで、本発明は、当該エリアとしてのあるエリアとレイアウトが近似する他のエリアを走行する際に、レイアウト変更の進捗が異なっても、他のエリアを走行する際に、当該エリアの地図データを利用することにより、他のエリアのレイアウトにマッチした地図データを使用することができる搬送ロボットを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明は上記問題点を解決するために創作されたものであって、第1には、自律走行して物品を搬送する搬送ロボットであって、搬送ロボットが走行するエリアの2次元点群データである初期地図データを記憶する初期地図データ記憶部(22)と、差分地図データを記憶するための差分地図データ記憶部(24)と、作業用当初地図データを記憶するための作業用当初地図データ記憶部(26)と、作業用更新地図データを記憶するための作業用更新地図データ記憶部(28)と、経路データを記憶する経路データ記憶部(30)と、一部地図データを記憶するための一部地図データ記憶部(32)と、車輪(14)と車輪を駆動する駆動部(16)とを有する駆動ユニット(13)と、レーザー光を2次元方向に走査するとともに反射光を受光し、距離と方向のデータからなるライダーデータを出力するライダーユニット(12)と、ライダーユニットからのライダーデータに基づき2次元点群データからなる一部地図データを作成し、作成した一部地図データを一部地図データ記憶部に記憶する一部地図データ作成制御部(41)と、一部地図データ作成制御部により作成された一部地図データと、作業用更新地図データ記憶部に記憶されている作業用更新地図データとから自己位置を推定する自己位置推定部(48)と、自己位置推定部により推定された自己位置のデータと、経路データ記憶部に記憶された経路データと、作業用更新地図データ記憶部に記憶された作業用更新地図データとにより駆動ユニットの動作を制御する走行制御部(50)と、地図データ制御部(46)と、を有し、搬送ロボットの走行開始時には、地図データ制御部は、初期地図データ記憶部に記憶された初期地図データに差分地図データ記憶部に記憶された差分地図データを追加したデータである合成地図データを作業用当初地図データとして作業用当初地図データ記憶部に記憶するとともに、該合成地図データを作業用更新地図データとして作業用更新地図データ記憶部に記憶し、搬送ロボットの走行中には、一部地図データ作成制御部が、予め定められた時間である第1の時間(T2)ごとに、一部地図データを一部地図データ記憶部に記憶するとともに、地図データ制御部は、予め定められた時間である第2の時間であって第1の時間よりも長い時間である第2の時間(T1)ごとに、一部地図データ記憶部から一部地図データを読み出し、作業用更新地図データに記憶された作業用更新地図データに該一部地図データを追加することにより、作業用更新地図データを更新し、搬送ロボットの走行終了時には、地図データ制御部は、作業用更新地図データ記憶部に記憶された作業用更新地図データと作業用当初地図データ記憶部に記憶された作業用当初地図データの差分である差分地図データを作成して、差分地図データ記憶部に記憶し、地図データ制御部は、各走行ごとに差分地図データを差分地図データ記憶部に記憶することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
17日前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
20日前
スター精密株式会社
工作機械
1か月前
ローム株式会社
半導体集積回路
25日前
株式会社ダイフク
搬送車
20日前
エイブリック株式会社
ボルテージレギュレータ
17日前
トヨタ自動車株式会社
工作機械の制御装置
18日前
トヨタ自動車株式会社
工作機械の制御装置
19日前
株式会社やまびこ
走行制御装置
5日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
株式会社ダイフク
物品搬送設備
18日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御装置および制御方法
1か月前
株式会社ダイヘン
搬送車
17日前
株式会社ダイヘン
搬送車
17日前
チームラボ株式会社
走行システム及び走行路
1か月前
株式会社ダイヘン
搬送車
17日前
株式会社ダイヘン
搬送車
17日前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
井関農機株式会社
作業車両
13日前
株式会社デンソー
診断装置
3日前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
23日前
ローム株式会社
バイアス回路
19日前
オルガノ株式会社
運転管理方法及び運転管理装置
20日前
ミツミ電機株式会社
多方向入力装置
23日前
ミツミ電機株式会社
多方向入力装置
23日前
ミツミ電機株式会社
多方向入力装置
23日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
23日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ


































