TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025022551
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023127236
出願日
2023-08-03
発明の名称
荷役車両
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
G05D
1/43 20240101AFI20250206BHJP(制御;調整)
要約
【課題】荷役車両の走行安定性の低下を抑制すること。
【解決手段】荷役車両は、周囲に障害物が存在する状態で停車している搬送車両に荷役を行う。荷役車両は、荷役対象物を検知する検知センサと、荷役対象物までの経路に沿って荷役車両が走行するように制御を行う制御装置と、を備える。経路は、直線と、曲線と、を含む。制御装置は、荷役車両の前進と後進との組み合わせにより、直線の長さが予め定められた最小値以上、かつ、曲線の半径が予め定められた最小半径以上となる経路に沿って荷役車両を走行させる。
【選択図】図4
特許請求の範囲
【請求項1】
周囲に障害物が存在する状態で停車している搬送車両に荷役を行う荷役車両であって、
荷役対象物を検知する検知センサと、
前記荷役対象物までの経路に沿って前記荷役車両が走行するように制御を行う制御装置と、を備え、
前記経路は、直線と、曲線と、を含み、
前記制御装置は、
前記荷役車両の前進と後進との組み合わせにより、前記直線の長さが予め定められた最小値以上、かつ、前記曲線の半径が予め定められた最小半径以上となる前記経路に沿って前記荷役車両を走行させる、荷役車両。
続きを表示(約 260 文字)
【請求項2】
前記制御装置は、前記荷役車両が予め定められた荷役開始位置に到達すると、前記荷役開始位置から前記荷役対象物までの予定経路であって予め定められた予定経路を前記検知センサの検知結果に応じて補正することで前記経路を取得する、請求項1に記載の荷役車両。
【請求項3】
前記検知センサは、前記荷役車両の前方に位置する前記荷役対象物を検知する前方向検知センサと、前記荷役車両の左右方向に位置する前記荷役対象物を検知する左右方向検知センサと、を含む、請求項1又は請求項2に記載の荷役車両。
発明の詳細な説明
【技術分野】
【0001】
本開示は、荷役車両に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1に開示の制御装置は、移動体を対象位置に移動させる経路を取得する。そして、制御装置は、経路に沿って移動体を移動させる。移動体は、例えば、荷役を行うフォークリフトである。経路は、搬送車両に積み込む荷、又は搬送車両から積み下ろす荷までの経路である。
【先行技術文献】
【特許文献】
【0003】
特開2021-165897号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
搬送車両の周囲には障害物が存在している場合がある。この場合、移動体が移動することができる範囲が制限される。これにより、移動体を直進させる距離を十分に確保できなかったり、移動体の急旋回が必要になったりすることで、移動体の走行安定性が低下するおそれがある。
【課題を解決するための手段】
【0005】
上記課題を解決する荷役車両は、周囲に障害物が存在する状態で停車している搬送車両に荷役を行う荷役車両であって、荷役対象物を検知する検知センサと、前記荷役対象物までの経路に沿って前記荷役車両が走行するように制御を行う制御装置と、を備え、前記経路は、直線と、曲線と、を含み、前記制御装置は、前記荷役車両の前進と後進との組み合わせにより、前記直線の長さが予め定められた最小値以上、かつ、前記曲線の半径が予め定められた最小半径以上となる前記経路に沿って前記荷役車両を走行させる。
【0006】
荷役車両の前進のみで荷役対象物まで荷役車両を走行させようとする場合、荷役車両と搬送車両との位置関係によっては、経路の直線の長さが最小値未満になったり、経路の曲線の半径が最小半径未満になったりするおそれがある。経路の直線の長さが最小値未満になると、荷役車両を直進させる距離を十分に確保できない。経路の曲線の半径が最小半径未満になると、荷役車両を急旋回させる必要がある。これに対して、荷役車両の後進を組み合わせることで、直線の長さが予め定められた最小値以上、かつ、曲線の半径が予め定められた最小半径以上となる経路で荷役車両を走行できるように荷役車両の位置を調整することができる。これにより、荷役車両の走行安定性の低下を抑制できる。
【0007】
上記荷役車両について、前記制御装置は、前記荷役車両が予め定められた荷役開始位置に到達すると、前記荷役開始位置から前記荷役対象物までの予定経路であって予め定められた予定経路を前記検知センサの検知結果に応じて補正することで前記経路を取得してもよい。
【0008】
上記荷役車両について、前記検知センサは、前記荷役車両の前方に位置する前記荷役対象物を検知する前方向検知センサと、前記荷役車両の左右方向に位置する前記荷役対象物を検知する左右方向検知センサと、を含んでいてもよい。
【発明の効果】
【0009】
本発明によれば、荷役車両の走行安定性の低下を抑制することができる。
【図面の簡単な説明】
【0010】
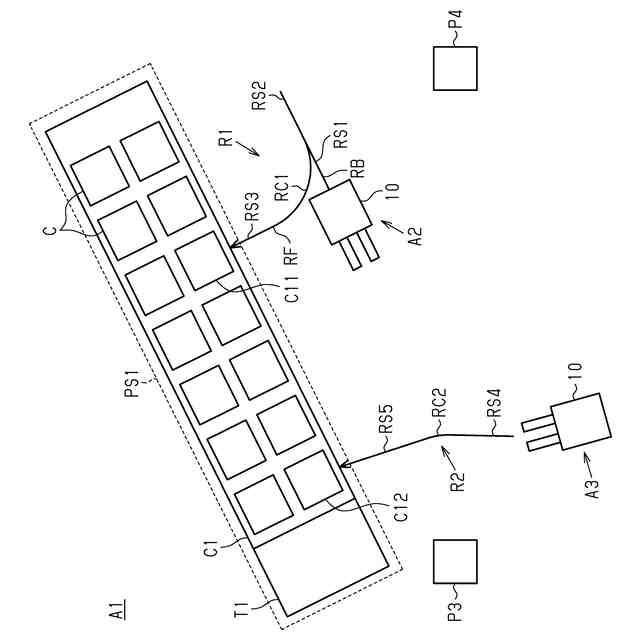
図1は搬送車両と荷役車両とを示す概略図である。
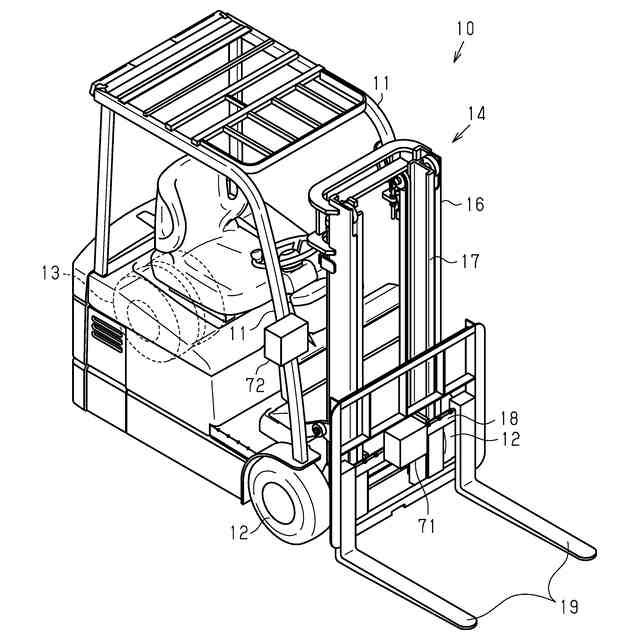
図2は荷役車両の斜視図である。
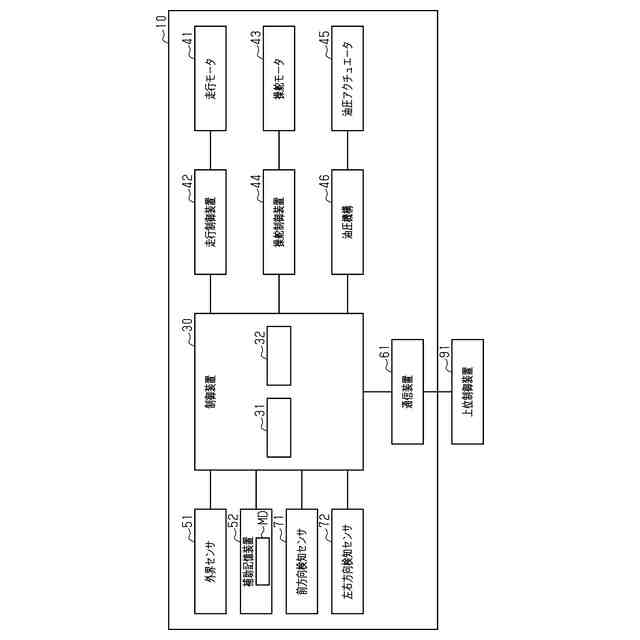
図3は荷役車両の概略構成図である。
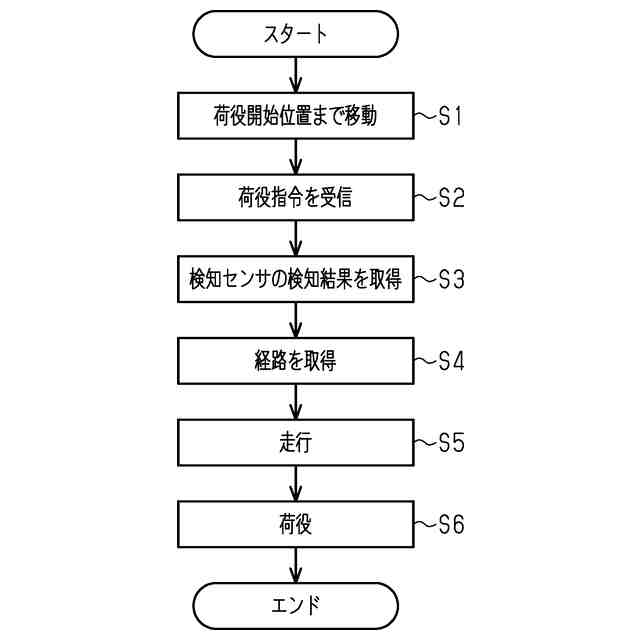
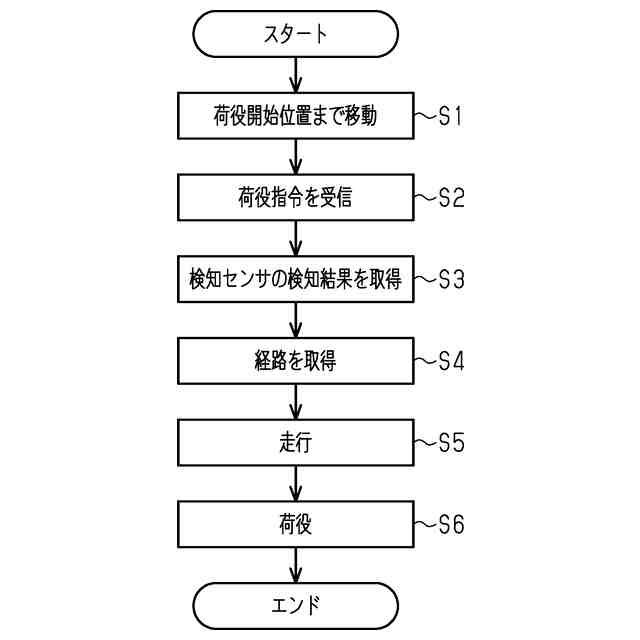
図4は制御装置が行う制御を示すフローチャートである。
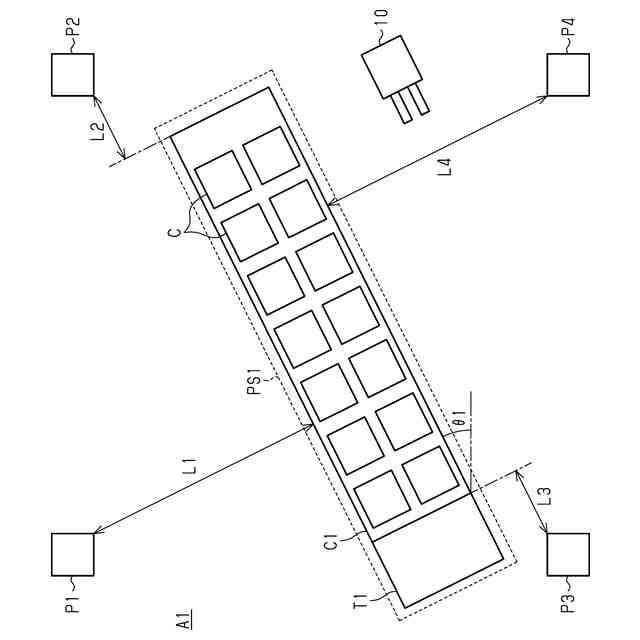
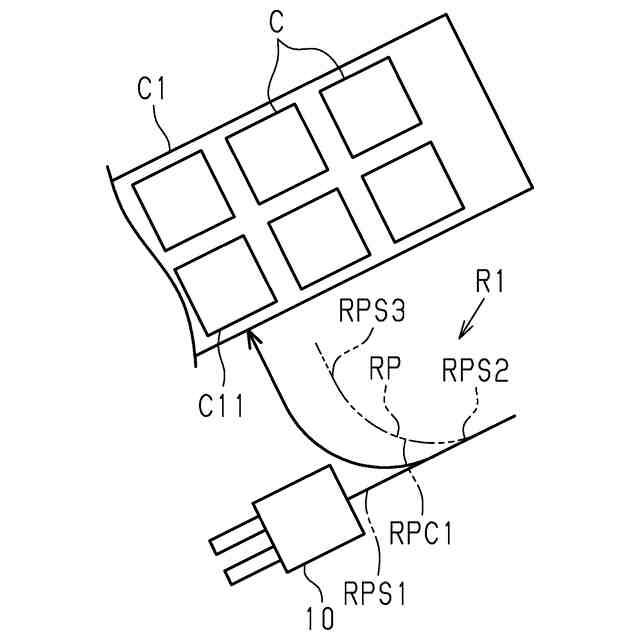
図5は荷役開始位置から荷役対象物までの経路の一例を示す図である。
図6は予定経路の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
4日前
和研工業株式会社
多連レバー機構
17日前
株式会社クボタ
作業車
7日前
スター精密株式会社
工作機械
1か月前
株式会社ダイフク
搬送車
7日前
ローム株式会社
半導体集積回路
12日前
エイブリック株式会社
ボルテージレギュレータ
4日前
トヨタ自動車株式会社
工作機械の制御装置
5日前
トヨタ自動車株式会社
工作機械の制御装置
6日前
国立大学法人広島大学
モデル誤差抑制補償器
1か月前
愛知機械テクノシステム株式会社
無人搬送車
26日前
株式会社ダイフク
物品搬送設備
5日前
アズビル株式会社
制御システムおよび制御方法
18日前
アズビル株式会社
制御システムおよび制御方法
18日前
アズビル株式会社
制御システムおよび制御方法
27日前
トヨタ自動車株式会社
自律走行装置
1か月前
日本精工株式会社
制御装置および制御方法
24日前
チームラボ株式会社
走行システム及び走行路
1か月前
株式会社ダイヘン
搬送車
4日前
株式会社ダイヘン
搬送車
4日前
株式会社ダイヘン
搬送車
4日前
株式会社ダイヘン
搬送車
4日前
井関農機株式会社
作業車両
今日
日本精工株式会社
制御システムおよび制御方法
1か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
26日前
ローム株式会社
半導体装置
1か月前
村田機械株式会社
稼働監視システム及び稼働監視方法
27日前
ミツミ電機株式会社
電源回路及びその起動方法
1か月前
ミツミ電機株式会社
多方向入力装置
10日前
ミツミ電機株式会社
多方向入力装置
24日前
ミツミ電機株式会社
多方向入力装置
24日前
ローム株式会社
バイアス回路
6日前
ミツミ電機株式会社
多方向入力装置
24日前
オルガノ株式会社
運転管理方法及び運転管理装置
7日前
ミツミ電機株式会社
多方向入力装置
24日前
ミツミ電機株式会社
多方向入力装置
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































