TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025006790
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023107782
出願日
2023-06-30
発明の名称
車両
出願人
株式会社明電舎
代理人
園田・小林弁理士法人
主分類
G05D
1/43 20240101AFI20250109BHJP(制御;調整)
要約
【課題】姿勢を維持しつつ360°の全方位に走行可能で、走行方向に障害物が位置している場合に、これを検知して、適切に走行制御する車両を、コストを抑制して実現する。
【解決手段】車両1は、車体部10と、車体部10の周囲に位置した障害物を検知可能とするように複数が設けられた、障害物センサ50と、走行制御部と、を備え、障害物センサ50には、全方位を網羅するように、複数の障害物検知領域Sが予め設定され、障害物センサ50は、複数の障害物検知領域Sの中の、指定された障害物検知領域Sの内側に、障害物が位置しているか否かを出力し、走行制御部は、複数の障害物検知領域Sの中から、走行方向が含まれるような障害物検知領域Sを決定し、この障害物検知領域Sに障害物があると障害物センサ50が出力した際に、車体部10を減速または停止させるように走行制御する。
【選択図】図4
特許請求の範囲
【請求項1】
姿勢を維持しつつ360°の全方位に走行可能な車体部と、
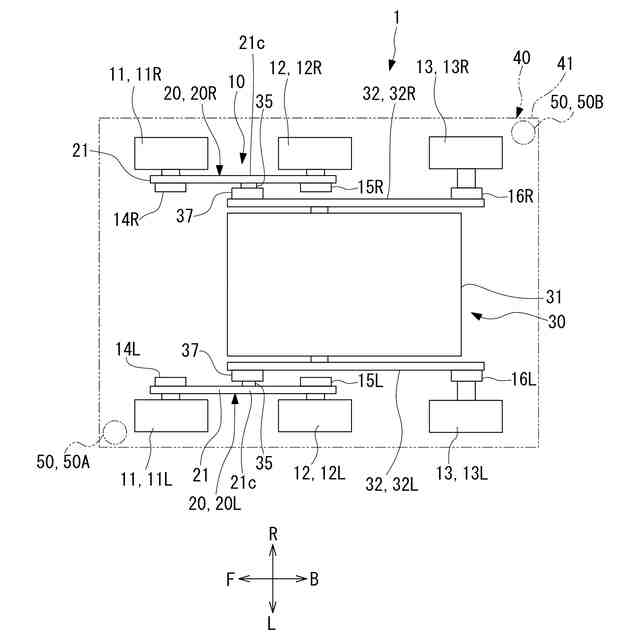
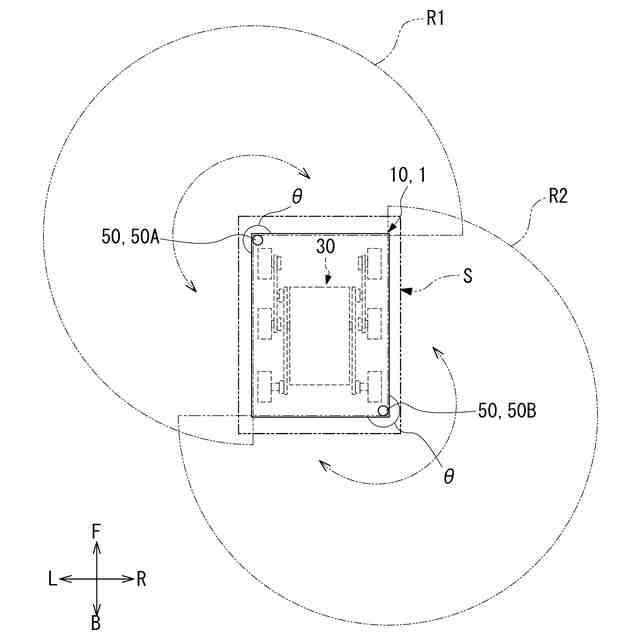
前記車体部の周囲の、前記全方位の中のいずれの方向に障害物が位置した場合でも、当該障害物を検知可能とするように、各々が異なる方向を向くように前記車体部に複数が設けられた、障害物センサと、
走行制御部と、を備え、
前記障害物センサには、前記全方位を網羅するように、複数の障害物検知領域が予め設定され、前記障害物センサは、複数の前記障害物検知領域の中の、指定された前記障害物検知領域の内側に、前記障害物が位置しているか否かを出力し、
前記走行制御部は、複数の前記障害物検知領域の中から、走行方向が含まれるような前記障害物検知領域を決定して、当該障害物検知領域を前記障害物センサに対して指定し、当該障害物検知領域に前記障害物があると前記障害物センサが出力した際に、前記車体部を減速または停止させるように走行制御する、車両。
続きを表示(約 2,600 文字)
【請求項2】
複数の前記障害物検知領域の各々は、前記車体部側に位置する内側領域と、前記内側領域よりも前記車体部から離れて位置する外側領域と、に区画され、
前記障害物センサは、指定された前記障害物検知領域の、前記内側領域と前記外側領域の各々に対して、内側に、前記障害物が位置しているか否かを出力し、
前記走行制御部は、前記外側領域に前記障害物があると前記障害物センサが出力した際に、速度が閾値以下となるように減速し、前記内側領域に前記障害物があると前記障害物センサが出力した際に、前記車体部の走行を停止するように制御する、請求項1に記載の車両。
【請求項3】
前記走行方向が含まれるような前記障害物検知領域に前記障害物があると前記障害物センサが出力した際に、前記走行制御部は、前記障害物が位置していると出力された前記障害物検知領域に含まれる方向へ走行する旨の走行指令を受信しても、当該走行指令を無効とする、請求項1に記載の車両。
【請求項4】
前記走行方向が含まれるような前記障害物検知領域に前記障害物があると前記障害物センサが出力した後、停止した際に、前記走行制御部は、前記全方位において、前記障害物が位置しているか否かを検知可能とするように前記障害物検知領域を決定し、前記障害物センサに、決定された前記障害物検知領域に前記障害物が位置しているか否かを出力させ、前記障害物が位置していると出力された場合には、当該出力がなされた前記障害物検知領域に含まれる方向へ走行する旨の走行指令を受信しても、当該走行指令を無効とする、請求項1に記載の車両。
【請求項5】
複数の前記障害物検知領域は、前方向に対応する前方領域、後方向に対応する後方領域、右方向に対応する右方領域、左方向に対応する左方領域、右前方に対応して前記前方領域と前記右方領域を含む右前方領域、左前方に対応して前記前方領域と前記左方領域を含む左前方領域、右後方に対応して前記後方領域と前記右方領域を含む右後方領域、及び左後方に対応して前記後方領域と前記左方領域を含む左後方領域を含み、
前記右前方領域、前記左前方領域、前記右後方領域、及び前記左後方領域のいずれかの領域に前記障害物があると前記障害物センサが出力した後、停止した際に、前記走行制御部は、当該領域に含まれる、前記前方領域と前記後方領域のいずれか一方である前後方領域と、前記右方領域と前記左方領域のいずれか一方である右左方領域との各々に対して、前記障害物センサに、前記障害物が位置しているか否かを出力させ、前記前後方領域と前記右左方領域のなかで、前記障害物が位置していると出力された領域に対して、当該領域に含まれる方向へ走行する旨の走行指令を受信した場合に、当該走行指令を無効とし、前記障害物が位置していないと出力された領域に対して、当該領域に含まれる方向へ走行する旨の走行指令を受信した場合には、当該走行指令を無効としない、請求項1に記載の車両。
【請求項6】
複数の前記障害物検知領域は、前方向に対応する前方領域、後方向に対応する後方領域、右方向に対応する右方領域、及び左方向に対応する左方領域を含み、
前記走行方向が含まれるような前記障害物検知領域に前記障害物があると前記障害物センサが出力した後、停止した際に、前記走行制御部は、前記障害物センサに、前記前方領域、前記後方領域、前記右方領域、及び前記左方領域の各々に、前記障害物が位置しているか否かを、個別に出力させ、前記障害物が位置していると出力された前記障害物検知領域に含まれる方向へ走行する旨の走行指令を受信した場合に、当該走行指令を無効とする、請求項1に記載の車両。
【請求項7】
前記車体部を俯瞰表示する、表示部を更に備え、
前記走行制御部は、前記障害物が位置していると出力された前記障害物検知領域に含まれる方向へ走行する旨の前記走行指令を受信した場合に、前記表示部の、前記車体部に対して対応する位置に、前記障害物検知領域を表示するとともに、前記表示部に、当該走行指令は無効である旨のメッセージを表示する、請求項3から6のいずれか一項に記載の車両。
【請求項8】
前記車体部の周囲には、互いに異なる方向を向くように、複数の警告灯が設けられ、
前記走行制御部は、前記障害物が位置していると前記障害物センサが出力した際に、前記障害物が位置していると出力された前記障害物検知領域に対応した方向を向くように設けられた前記警告灯を点灯させる、請求項1から6のいずれか一項に記載の車両。
【請求項9】
前記車体部とは離間して設けられた操作装置と、
表示部と、
を更に備え、
前記操作装置は、複数の走行指令の各々に対応して設けられた、複数の入力部を備え、複数の前記入力部の各々が操作されることによって、前記操作装置は、当該入力部に対応する前記走行指令の入力を受け付け、入力を受け付けた前記走行指令を前記走行制御部へと送信し、
前記表示部は、前記操作装置の外観と複数の前記入力部を表示し、複数の前記入力部のいずれかが操作された場合には、当該入力部を他の前記入力部に対して識別表示し、
複数の前記走行指令は、
操作有効指令であって、前記操作装置は、当該操作有効指令に対応する前記入力部が操作されているときのみ、他の前記入力部に対応する前記走行指令の入力を受け付ける、前記操作有効指令と、
インチング有効指令であって、当該インチング有効指令に対応する前記入力部が操作されているときには、前記操作装置は、他の前記入力部に対する操作を、非連続な1回の操作と見做して、当該入力部に対応する前記走行指令の入力を受け付ける、前記インチング有効指令と、
複合走行指令であって、複数の前記走行指令の中の、2以上の前記走行指令を含むように構成され、当該複合走行指令に対応する前記入力部が操作されると、当該複合走行指令に含まれる2以上の前記走行指令の各々が、連続的に、前記走行制御部により実行される、前記複合走行指令と、
のいずれか、またはいずれかの組み合わせを含む、請求項1から6のいずれか一項に記載の車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両に関する。
続きを表示(約 4,700 文字)
【背景技術】
【0002】
一般に、工場等の内部における資材の運搬や、自動倉庫等における物品の荷捌き等のために、搬送車やロボット等の、様々な車両が用いられている。このような車両が、自律走行するような場合においては、進路上の障害物を検知し、検知状況に応じて車両を走行制御することが求められる。離間した位置から作業者によって車両が遠隔操作される場合においても、進路上に障害物を検知した場合には、例えば車両を自動的に減速、停止するように、制御されるのが望ましい。
これに関し、例えば特許文献1には、所定の角度範囲毎に検出物体までの距離を測定する非接触式の距離測定器と、無人搬送車の走行中に、現在の走行区間に設定された検出エリアのパターンの範囲内に、所定の角度範囲毎に測定された検出物体までの距離があるとき、障害物検出の出力を発生する判定手段と、を備える無人搬送車の障害物センサが開示されている。
特許文献1においては、検出エリアのパターンは、現在走行中の走行区間に応じて、切り替えられる。また、特許文献1に記載された無人搬送車は、走行方向が基本的には前方のみの1方向である。したがって、障害物センサは、無人搬送車の前方に向けて設けられ、検出エリアのパターンは、無人搬送車の前方に設定されている。
【0003】
特許文献1に記載されたような、走行方向が限られた車両においては、例えば前進しながら右に、あるいは左に向きを変えるようにして、右折、左折することにより、走行方向が変えられる。このような車両においては、走行方向を変える場合に、一定の旋回半径を必要とするため、例えば狭い走行路が複雑に分岐しているような走行路を車両が走行する場合に、走行方向の変更のための旋回半径を走行路上に確保することができない可能性がある。したがって、走行方向を自在に変えることが難しい。
このため、上記のような車両を、姿勢を維持しつつ360°の全方位に走行可能とするように実現して、走行方向を自在に変更することができる構成とすることがある。
【0004】
このような、姿勢を維持しつつ360°の全方位に走行可能な車両において、進路上の障害物を検知するためには、障害物センサの検知対象を、車両の周囲の、360°の全方位とする必要がある。このために、障害物センサとして、例えば3D-LiDAR(Light Detection And Ranging)等の、周囲360°における障害物を検知することが可能なセンサを、車両に搭載することが考えられる。しかし、このようなセンサは高価であり、コストが嵩む。
姿勢を維持しつつ360°の全方位に走行可能で、走行方向に障害物が位置している場合に、これを検知して、適切に走行制御する車両を、コストを抑制して実現することが望まれている。
【先行技術文献】
【特許文献】
【0005】
特開2002-215238号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題は、姿勢を維持しつつ360°の全方位に走行可能で、走行方向に障害物が位置している場合に、これを検知して、適切に走行制御する車両を、コストを抑制して実現することである。
【課題を解決するための手段】
【0007】
本発明は、上記課題を解決するため、以下の手段を採用する。
すなわち、本発明の車両は、姿勢を維持しつつ360°の全方位に走行可能な車体部と、前記車体部の周囲の、前記全方位の中のいずれの方向に障害物が位置した場合でも、当該障害物を検知可能とするように、各々が異なる方向を向くように前記車体部に複数が設けられた、障害物センサと、走行制御部と、を備え、前記障害物センサには、前記全方位を網羅するように、複数の障害物検知領域が予め設定され、前記障害物センサは、複数の前記障害物検知領域の中の、指定された前記障害物検知領域の内側に、前記障害物が位置しているか否かを出力し、前記走行制御部は、複数の前記障害物検知領域の中から、走行方向が含まれるような前記障害物検知領域を決定して、当該障害物検知領域を前記障害物センサに対して指定し、当該障害物検知領域に前記障害物があると前記障害物センサが出力した際に、前記車体部を減速または停止させるように走行制御する。
上記のような構成においては、車両には、障害物センサが複数、車体部の周囲の、全方位のいずれの方向に障害物が位置した場合でも、これを検知可能とするように、各々が異なる方向を向くように設けられている。このため、1つの障害物センサのみによって、360°の全方位を対象として、障害物を検知する必要がなくなる。したがって、360°の全方位を検知可能な、高価なセンサを用いる必要がない。
また、例えば障害物センサとして3D-LiDAR等の、結果として対象物までの距離を出力するようなものを使用した場合においては、走行制御部側で、障害物検知領域内に障害物が位置しているか否かを判定するために、障害物センサから出力された結果としての距離の値を閾値と比較する等の、煩雑な内部処理が必要となる。これに対し、上記のような構成においては、障害物センサには、360°の全方位を網羅するように、複数の障害物検知領域が予め設定され、障害物センサは、複数の障害物検知領域の中の、指定された障害物検知領域の内側に、障害物が位置しているか否かを出力する。すなわち、障害物センサは、複数の障害物検知領域の中から障害物検知領域を指定すれば、当該障害物検知領域の中に障害物が位置しているか否かの判定結果を、結果として出力する。このため、走行制御部側では、障害物検知領域内に障害物が位置しているか否かを判定するに際しては、障害物センサの判定結果をそのまま使用すればよく、煩雑な内部処理を必要としない。したがって、このような内部処理を実現するための、LSI(Large Scale Integration(大規模集積回路))や、CPU(Central Processing Unit)等の情報処理部品として、低廉なものを使用することができる。
上記のような効果が相乗し、車両のコストを抑制することができる。
このような障害物センサを用いて、障害物センサに、360°の全方位を網羅するように、複数の障害物検知領域を予め設定したうえで、走行制御部が上記のように、複数の障害物検知領域の中から、走行方向が含まれるような障害物検知領域を決定して、当該障害物検知領域を障害物センサに対して指定し、当該障害物検知領域に障害物があると障害物センサが出力した際に、減速または停止するように走行制御することによって、姿勢を維持しつつ360°の全方位に走行可能で、走行方向に障害物が位置している場合に、これを検知して、適切に走行制御する車両を、コストを抑制して実現することが可能となる。
【0008】
本発明の一態様においては、複数の前記障害物検知領域の各々は、前記車体部側に位置する内側領域と、前記内側領域よりも前記車体部から離れて位置する外側領域と、に区画され、前記障害物センサは、指定された前記障害物検知領域の、前記内側領域と前記外側領域の各々に対して、内側に、前記障害物が位置しているか否かを出力し、前記走行制御部は、前記外側領域に前記障害物があると前記障害物センサが出力した際に、速度が閾値以下となるように減速し、前記内側領域に前記障害物があると前記障害物センサが出力した際に、前記車体部の走行を停止するように制御する。
上記のような構成によれば、複数の障害物検知領域の各々を、車体部側に位置する内側領域と、内側領域よりも車体部から離れて位置する外側領域と、に区画し、障害物センサが、指定された障害物検知領域の、内側領域と外側領域の各々に対して、その内側に、障害物が位置しているか否かを出力するように構成したうえで、走行制御部が、外側領域に障害物があると障害物センサが出力した際に、速度が閾値以下となるように減速し、内側領域に障害物があると障害物センサが出力した際に、走行を停止するように制御するようにすることで、センサとして3D-LiDAR等の、結果として対象物までの距離を出力するようなものを使用しない場合であっても、障害物との距離に応じた走行制御を、緻密に行うことができる。
【0009】
本発明の別の態様においては、前記走行方向が含まれるような前記障害物検知領域に前記障害物があると前記障害物センサが出力した際に、前記走行制御部は、前記障害物が位置していると出力された前記障害物検知領域に含まれる方向へ走行する旨の走行指令を受信しても、当該走行指令を無効とする。
上記のような構成によれば、周囲に障害物があると障害物センサが出力した際に、走行制御部は、障害物が位置していると出力された障害物検知領域に含まれる方向へ走行する旨の走行指令を受信しても、当該走行指令を無効とするように制御する。このため、障害物へと接近するような走行を抑制することができる。
【0010】
本発明の別の態様においては、前記走行方向が含まれるような前記障害物検知領域に前記障害物があると前記障害物センサが出力した後、停止した際に、前記走行制御部は、前記全方位において、前記障害物が位置しているか否かを検知可能とするように前記障害物検知領域を決定し、前記障害物センサに、決定された前記障害物検知領域に前記障害物が位置しているか否かを出力させ、前記障害物が位置していると出力された場合には、当該出力がなされた前記障害物検知領域に含まれる方向へ走行する旨の走行指令を受信しても、当該走行指令を無効とする。
上記のような構成によれば、周囲に障害物があると障害物センサが出力した後、停止した際に、走行制御部は、障害物が位置していると出力された障害物検知領域に含まれる方向へ走行する旨の走行指令を受信しても、当該走行指令を無効とするように制御する。このため、障害物へと接近するような走行を抑制することができる。
ここで、走行制御部は、全方位において、障害物が位置しているか否かを検知可能とするように障害物検知領域を決定し、障害物センサに、決定された障害物検知領域に障害物が位置しているか否かを出力させる。このため、車両が停止した状態において、車両が停止する要因となった障害物が車両の周囲から移動して存在しなければ、障害物センサは対応する障害物検知領域に障害物が位置していないと出力し得る。また、新たな障害物が車両の周囲に侵入してきていれば、障害物センサは、新たな障害物が位置していることを検知して、出力することもできる。このようにして、車両の周囲の全方位において、停止している際の障害物に関する情報が更新される。上記のような、走行指令を無効とするような制御は、このようにして更新された情報を基に行われる。したがって、受信した走行指令において指定された走行方向を、無効とするか否かの判断を、停止の後の始動しようとする時点における障害物の状況に基づいて、適切に行うことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社明電舎
車両冷却装置、車両冷却装置用ダクト
今日
株式会社明電舎
監視装置、監視方法及び監視プログラム
7日前
個人
無人作業システム
2か月前
アズビル株式会社
制御装置
2か月前
コフロック株式会社
流量制御装置
2か月前
和研工業株式会社
多連レバー機構
12日前
株式会社クボタ
作業車
2日前
株式会社丸和製作所
入力機器
2か月前
スター精密株式会社
工作機械
28日前
株式会社豊田自動織機
荷役車両
1か月前
株式会社フジキン
流量制御装置
2か月前
ローム株式会社
半導体集積回路
7日前
株式会社ダイフク
搬送車
2日前
株式会社シンテックホズミ
搬送ロボット
1か月前
株式会社村田製作所
温度補償回路
2か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
工作機械の制御装置
1日前
トヨタ自動車株式会社
工作機械の制御装置
今日
愛知機械テクノシステム株式会社
無人搬送車
21日前
株式会社ダイフク
物品搬送設備
2か月前
国立大学法人広島大学
モデル誤差抑制補償器
1か月前
株式会社ダイフク
物品搬送設備
今日
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
アズビル株式会社
制御システムおよび制御方法
13日前
アズビル株式会社
制御システムおよび制御方法
22日前
ルネサスエレクトロニクス株式会社
半導体装置
2か月前
アズビル株式会社
制御システムおよび制御方法
13日前
トヨタ自動車株式会社
自律走行装置
1か月前
日本精工株式会社
制御装置および制御方法
19日前
チームラボ株式会社
走行システム及び走行路
26日前
ミツミ電機株式会社
電源回路及びその起動方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
21日前
ローム株式会社
半導体装置
1か月前
村田機械株式会社
稼働監視システム及び稼働監視方法
22日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ