TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024168091
公報種別
公開特許公報(A)
公開日
2024-12-05
出願番号
2023084499
出願日
2023-05-23
発明の名称
移動体
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
G05D
1/43 20240101AFI20241128BHJP(制御;調整)
要約
【課題】誘導線に沿って移動する移動体では、誘導線上に障害物が存在した場合に、移動を継続できなかった。
【解決手段】移動体1は、移動体1の前方の撮影画像を取得する画像取得部12と、撮影画像を上方から見た平面画像に変換する画像変換部13と、平面画像において、床面に設けられた視覚的に認識可能な誘導線を検出する検出部14と、移動体1の前方の障害物を検出する障害物検出部15と、移動機構16と、検出された誘導線と平行であり、誘導線とそれぞれ第1及び第2の距離だけ離れた2個の仮想ラインの一方に沿って移動体1が移動するように移動機構16を制御する移動制御部17とを備え、移動制御部17は、障害物が検出された場合に移動体1が移動する仮想ラインを変更する。このようにして、前方に障害物が存在する場合でも、その障害物を回避することができる。
【選択図】図1A
特許請求の範囲
【請求項1】
床面に設けられた視覚的に認識可能な誘導線を用いて移動する移動体であって、
前記移動体の前方を撮影した撮影画像を取得する画像取得部と、
前記撮影画像を上方から見た平面画像に変換する画像変換部と、
前記平面画像において誘導線を検出する検出部と、
前記移動体を移動させる移動機構と、
前記検出部によって検出された誘導線と平行であり、当該誘導線とそれぞれ第1及び第2の距離だけ離れた2個の仮想ラインの一方に沿って前記移動体が移動するように前記移動機構を制御する移動制御部と、
前記移動体の前方の障害物を検出する障害物検出部と、を備え、
前記移動制御部は、前記障害物検出部によって障害物が検出された場合に、前記移動体が移動する仮想ラインを変更する、移動体。
続きを表示(約 740 文字)
【請求項2】
前記2個の仮想ラインは、第1及び第2の仮想ラインを含み、
前記移動制御部は、前記移動体が前記第1の仮想ラインに沿って移動している際に障害物が検出された場合に、前記移動体が前記第2の仮想ラインに沿って移動するように前記移動機構を制御し、当該障害物の回避後に、前記移動体が前記第1の仮想ラインに沿って移動するように前記移動機構を制御する、請求項1記載の移動体。
【請求項3】
前記移動制御部は、前記障害物検出部によって障害物が検出された場合にのみ、前記移動体が移動する仮想ラインを変更する、請求項1記載の移動体。
【請求項4】
前記障害物検出部は、前記2個の仮想ラインごとに、単位時間あたり、または単位距離あたりの障害物の検出頻度を取得し、
前記移動制御部は、移動の開始時に、前記障害物の検出頻度の低い仮想ラインに沿って前記移動体が移動するように前記移動機構を制御する、請求項3記載の移動体。
【請求項5】
前記検出部は、前記平面画像において検出した誘導線上に配置されたマーカをも検出し、
前記移動制御部は、前記マーカが検出された場合に、当該検出されたマーカと所定の位置関係となるように前記移動体が停止するように前記移動機構を制御する、請求項1から請求項4のいずれか記載の移動体。
【請求項6】
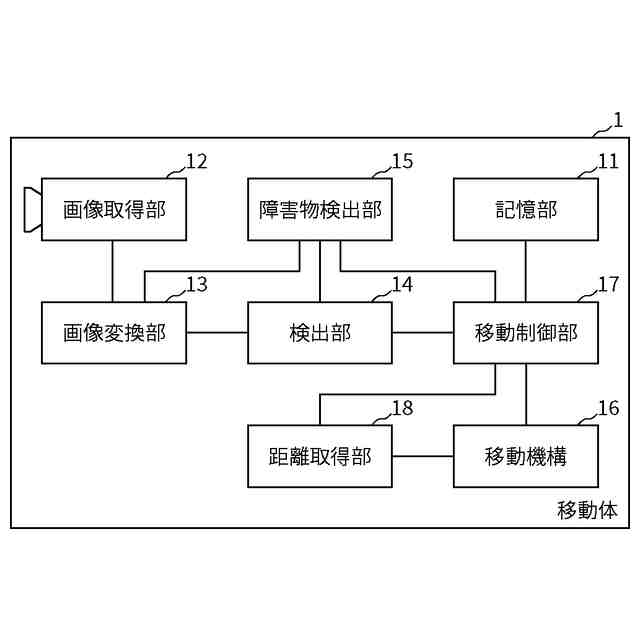
前記移動体の移動距離を取得する距離取得部をさらに備え、
前記移動制御部は、前記距離取得部によって取得された移動距離を用いて、前記誘導線に応じた移動距離が所定の値となった場合に、前記移動体が停止するように前記移動機構を制御する、請求項1から請求項4のいずれか記載の移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、床面に設けられた視覚的に認識可能な誘導線を用いて移動する移動体に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、無人搬送車等において、SLAM(Simultaneous Localization and Mapping)を用いて自己位置を推定することが行われている(例えば、特許文献1参照)。レイアウトがあまり変わらない移動環境では、SLAMを用いることによって、自己位置を適切に推定しながら所望の移動を実現することができる。
【先行技術文献】
【特許文献】
【0003】
特開2021-047671号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一方、工場などのように、レイアウトが頻繁に変更される移動環境では、SLAMを用いた移動は困難になる。また、工場などの建物内では、GPS(Global Positioning System)を用いた移動制御も困難である。また、床面に設けられた誘導線に沿って移動体を移動させることも考えられるが、誘導線上に障害物が存在した場合に、移動を継続することができないという問題がある。
【0005】
本発明は、上記課題を解決するためになされたものであり、誘導線を用いて移動する際に、障害物を回避することができる移動体を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の一態様による移動体は、床面に設けられた視覚的に認識可能な誘導線を用いて移動する移動体であって、移動体の前方を撮影した撮影画像を取得する画像取得部と、撮影画像を上方から見た平面画像に変換する画像変換部と、平面画像において誘導線を検出する検出部と、移動体を移動させる移動機構と、検出部によって検出された誘導線と平行であり、誘導線とそれぞれ第1及び第2の距離だけ離れた2個の仮想ラインの一方に沿って移動体が移動するように移動機構を制御する移動制御部と、移動体の前方の障害物を検出する障害物検出部と、を備え、移動制御部は、障害物検出部によって障害物が検出された場合に、移動体が移動する仮想ラインを変更する、ものである。
【発明の効果】
【0007】
本発明の一態様による移動体によれば、床面に設けられた視覚的に認識可能な誘導線に平行な第1及び第2の仮想ラインの一方に沿って移動している際に障害物を検知した場合には、移動する仮想ラインを切り替えることによって障害物を回避することができる。
【図面の簡単な説明】
【0008】
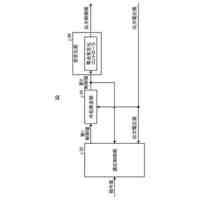
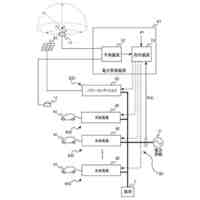
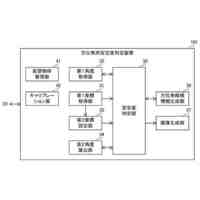
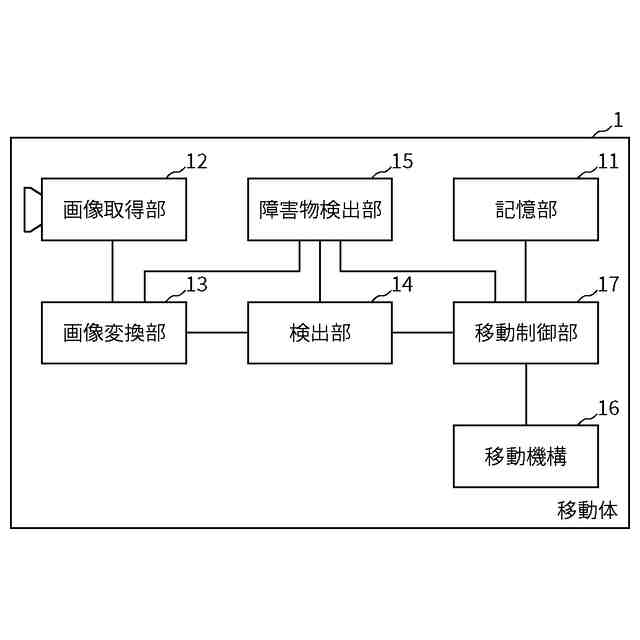
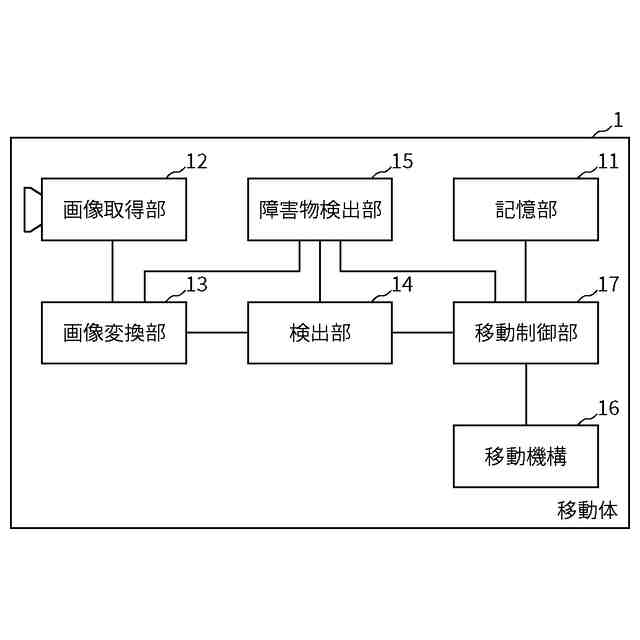
本発明の実施の形態による移動体の構成を示すブロック図
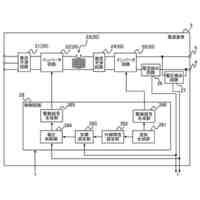
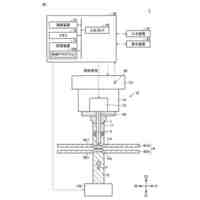
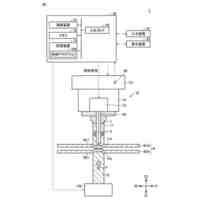
同実施の形態による移動体の他の構成を示すブロック図
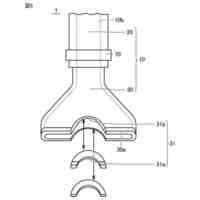
同実施の形態におけるマーカの一例を示す図
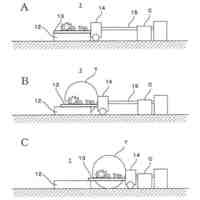
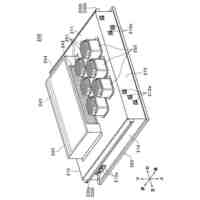
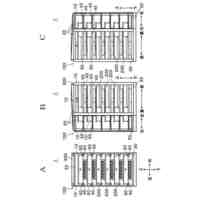
同実施の形態における移動体の移動領域を示す平面図
同実施の形態における移動体の移動領域を示す平面図
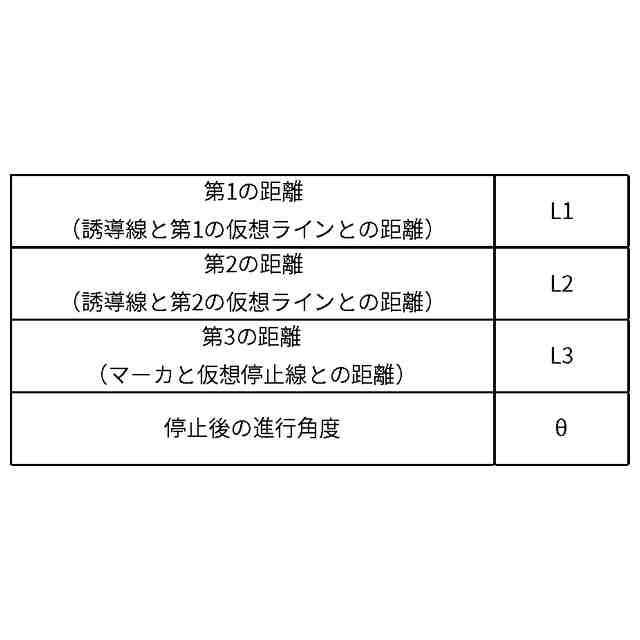
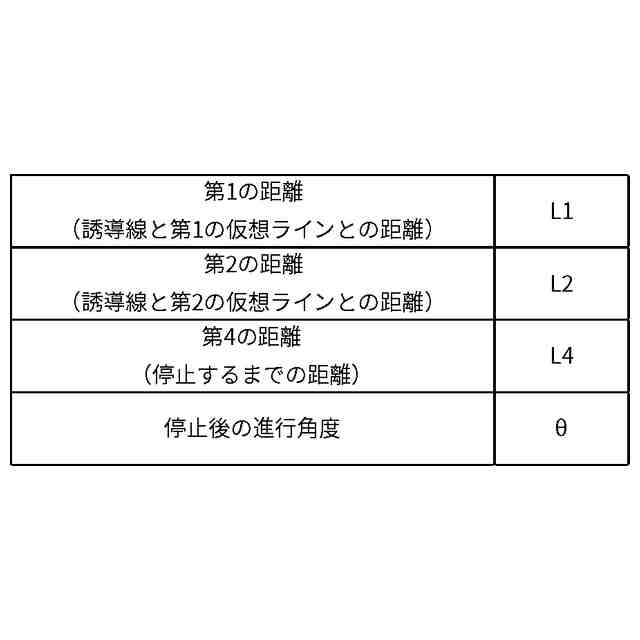
同実施の形態におけるパラメータの一例を示す図
同実施の形態におけるパラメータの他の一例を示す図
同実施の形態における撮影画像の一例を示す図
同実施の形態における平面画像の一例を示す図
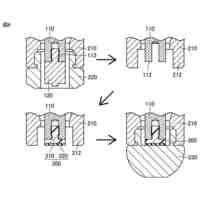
同実施の形態における障害物の回避について説明するための図
同実施の形態におけるマーカを用いた停止制御について説明するための図
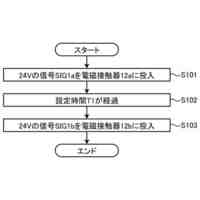
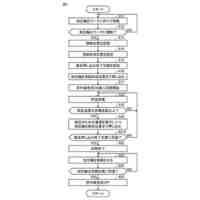
同実施の形態による移動体の動作を示すフローチャート
【発明を実施するための形態】
【0009】
以下、本発明による移動体について、実施の形態を用いて説明する。なお、以下の実施の形態において、同じ符号を付した構成要素及びステップは同一または相当するものであり、再度の説明を省略することがある。本実施の形態による移動体は、床面に設けられた視覚的に認識可能な誘導線に平行な第1及び第2の仮想ラインの一方に沿って移動している際に障害物を検知した場合には、移動する仮想ラインを切り替えることによって障害物を回避するものである。
【0010】
図1Aは、本実施の形態による移動体1の構成を示すブロック図である。本実施の形態による移動体1は、床面に設けられた視覚的に認識可能な誘導線を用いて移動するものであり、記憶部11と、画像取得部12と、画像変換部13と、検出部14と、障害物検出部15と、移動機構16と、移動制御部17とを備える。移動体1の用途は特に限定されないが、移動体1は、例えば、搬送を行う移動体であってもよく、警備や清掃などのその他の用途の移動体であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ダイヘン
変圧器
2か月前
株式会社ダイヘン
移動装置
17日前
株式会社ダイヘン
制御装置
1か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社ダイヘン
溶接装置
2か月前
株式会社ダイヘン
溶接装置
2か月前
株式会社ダイヘン
給電装置
1か月前
株式会社ダイヘン
電源装置
1か月前
株式会社ダイヘン
溶接トーチ
2か月前
株式会社ダイヘン
溶接トーチ
2か月前
株式会社ダイヘン
溶接トーチ
2か月前
株式会社ダイヘン
溶接トーチ
2か月前
株式会社ダイヘン
固相接合装置
5日前
株式会社ダイヘン
固相接合装置
1か月前
株式会社ダイヘン
溶接電源装置
1か月前
株式会社ダイヘン
溶接電源装置
1か月前
株式会社ダイヘン
固相接合装置
5日前
株式会社ダイヘン
電力変換装置
12日前
株式会社ダイヘン
直流電源回路
2か月前
株式会社ダイヘン
電力管理装置
5日前
株式会社ダイヘン
固相接合装置
5日前
株式会社ダイヘン
固相接合装置
5日前
株式会社ダイヘン
溶接電源装置
1か月前
株式会社ダイヘン
高周波電源装置
2か月前
株式会社ダイヘン
安定度向上装置
2か月前
株式会社ダイヘン
変換装置集積体
12日前
株式会社ダイヘン
スポット接合装置
1か月前
株式会社ダイヘン
フラックス回収装置
2か月前
株式会社ダイヘン
サブマージアーク溶接機
2か月前
株式会社ダイヘン
サブマージアーク溶接機
2か月前
株式会社ダイヘン
コイル及び電力授受装置
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
2か月前
株式会社ダイヘン
2重シールドティグ溶接方法
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ