TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024163557
公報種別
公開特許公報(A)
公開日
2024-11-22
出願番号
2023079289
出願日
2023-05-12
発明の名称
自律移動体
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G05D
1/43 20240101AFI20241115BHJP(制御;調整)
要約
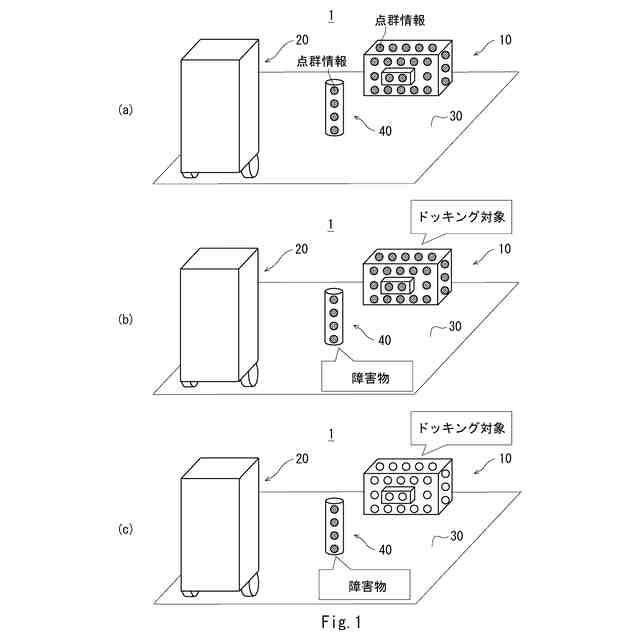
【課題】障害物との衝突を回避しつつ、ドッキング対象に接続することができる自律移動体を提供する。
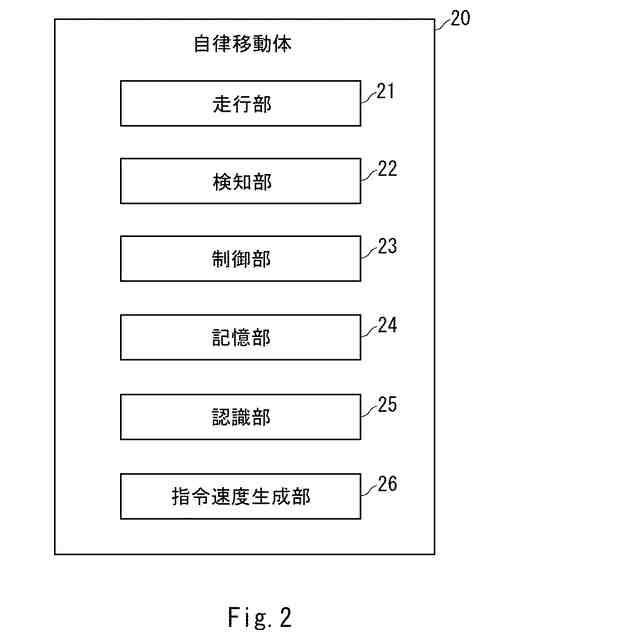
【解決手段】本開示の一形態に係る自律移動体20は、周囲の障害物40を含む周囲の環境情報を検知する検知部22と、接続する対象となるドッキング対象10を記憶する記憶部24と、環境情報からドッキング対象10を認識する認識部25と、障害物40との衝突を回避して指令速度で走行させる指令速度生成部26と、を備え、認識部25は、ドッキング対象10との接続時において、環境情報の中にドッキング対象10を認識した場合には、環境情報からドッキング対象10を除外する。
【選択図】図1
特許請求の範囲
【請求項1】
周囲の障害物を含む前記周囲の環境情報を検知する検知部と、
接続する対象となるドッキング対象を記憶する記憶部と、
前記環境情報から前記ドッキング対象を認識する認識部と、
前記障害物との衝突を回避して指令速度で走行させる指令速度生成部と、
を備え、
前記認識部は、
前記ドッキング対象との接続時において、前記環境情報の中に前記ドッキング対象を認識した場合には、
前記環境情報から前記ドッキング対象を除外する、
自律移動体。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自律移動体に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、掃除機本体に設けられる赤外線受光部、測距センサ、及び、底面用測距センサと、バンパセンサの値とで検知した障害物が充電台か否かを判断する点が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-146145号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロボット等の自律移動体における指令速度生成部は、ロボットと、ロボットの周辺の障害物とが接触しないような指令速度を生成する。また、ロボットの周辺における障害物の位置は、ロボットに搭載されたライダー(Light Detection and Ranging)やデプスカメラ等で取得される。 一方で、自動充電のような充電器と接続するドッキングタスクにおいては、充電器のコネクタ等のドッキング対象と、ロボットとが物理的に接触しなければいけないため、上記のような指令速度生成部の機能と矛盾が生じるという課題がある。
【0005】
本開示は、このような問題点に鑑みてなされたものであり、障害物との衝突を回避しつつ、ドッキング対象に接続することができる自律移動体を提供する。
【課題を解決するための手段】
【0006】
本開示の一態様の自律移動体は、周囲の障害物を含む前記周囲の環境情報を検知する検知部と、接続する対象となるドッキング対象を記憶する記憶部と、前記環境情報から前記ドッキング対象を認識する認識部と、前記障害物との衝突を回避して指令速度で走行させる指令速度生成部と、を備え、前記認識部は、前記ドッキング対象との接続時において、前記環境情報の中に前記ドッキング対象を認識した場合には、前記環境情報から前記ドッキング対象を除外する。
【発明の効果】
【0007】
本開示によれば、障害物との衝突を回避しつつ、ドッキング対象に接続することができる自律移動体を提供することができる。
【図面の簡単な説明】
【0008】
(a)~(c)は、実施形態1に係る自律移動システムにおいて、ドッキング対象、自律移動体及び障害物を例示した構成図である。
実施形態1に係る自律移動システムにおいて、自律移動体を例示したブロック図である。
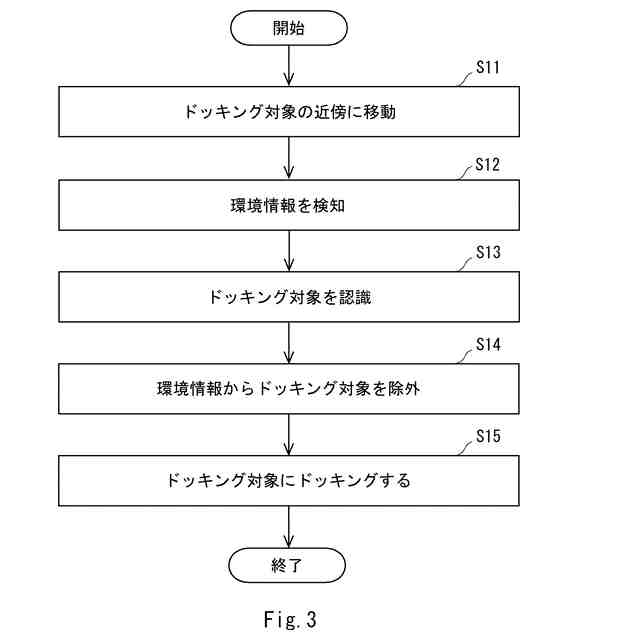
実施形態1に係る自律移動システムにおいて、自律移動体がドッキング対象に接続する動作を例示したフローチャート図である。
【発明を実施するための形態】
【0009】
以下、本開示を適用した具体的な実施の形態について、図面を参照しながら詳細に説明する。但し、本開示が以下の実施の形態に限定される訳ではない。また、説明を明確にするため、以下の記載及び図面は、適宜、簡略化されている。図が煩雑にならないように、いくつかの符号及びハッチングが省略されている。
【0010】
(実施形態1)
以下、図面を参照して実施形態1に係る自律移動システムを説明する。本実施形態の自律移動システムにおいて、自律移動体は、接続する対象となるドッキング対象の位置を認識し、障害物を含む環境情報からドッキング対象を除外する。図1(a)~(c)は、実施形態1に係る自律移動システム1において、ドッキング対象10、自律移動体20及び障害物40を例示した構成図である。図1(a)は、自律移動体20がドッキング対象10の近傍に移動し、ドッキング対象10及び障害物40を含む環境情報を検知した状態を示し、図1(b)は、自律移動体20が環境情報に含まれたドッキング対象10及び障害物40を認識した状態を示し、図1(c)は、自律移動体20が環境情報からドッキング対象10を除外した状態を示す。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
6日前
積水樹脂株式会社
磁性シート
1か月前
ugo株式会社
移動体
6日前
個人
車両レバー操作装置
1か月前
株式会社豊田自動織機
自動走行体
2か月前
株式会社豊田自動織機
無人走行体
1か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
トヨタ自動車株式会社
自律移動体
5日前
エイブリック株式会社
基準電圧回路装置
1か月前
トヨタ自動車株式会社
搬送システム
29日前
オムロン株式会社
自律作業システム
1か月前
株式会社熊谷組
巡回ルート作成装置
1か月前
トヨタ自動車株式会社
搬送ロボット
19日前
株式会社ダイヘン
電力変換装置
1か月前
株式会社ダイヘン
電力変換装置
1か月前
エイブリック株式会社
シャントレギュレータ
1か月前
トヨタ自動車株式会社
ロボットシステム
29日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
位置推定システム
5日前
トヨタ自動車株式会社
自律移動システム
5日前
オムロン株式会社
設計装置および設計方法
1か月前
株式会社FUJI
工作機械の操作システム
12日前
株式会社栗本鐵工所
操作装置
20日前
株式会社デンソー
電子制御装置
2か月前
株式会社ダイフク
物品搬送設備
29日前
株式会社FUJI
作業機の操作表示システム
1か月前
東芝ライテック株式会社
管理システム
1か月前
株式会社ダイフク
物品搬送設備
1か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
19日前
アズビル株式会社
診断システムおよび診断方法
1か月前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
株式会社栗本鐵工所
触覚提示装置
1か月前
株式会社豊田自動織機
移動体制御システム
1か月前
横河電機株式会社
モジュール
1か月前
トヨタ自動車株式会社
操作装置及び移動ロボット
27日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































