TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024130768
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023040671
出願日
2023-03-15
発明の名称
無人走行体
出願人
株式会社豊田自動織機
代理人
主分類
G05D
1/43 20240101AFI20240920BHJP(制御;調整)
要約
【課題】車体の幅に対応する通路を通過できるほか、車体の幅が制約を受けない場合には、効率的な走行を実現できる無人走行体の提供にある。
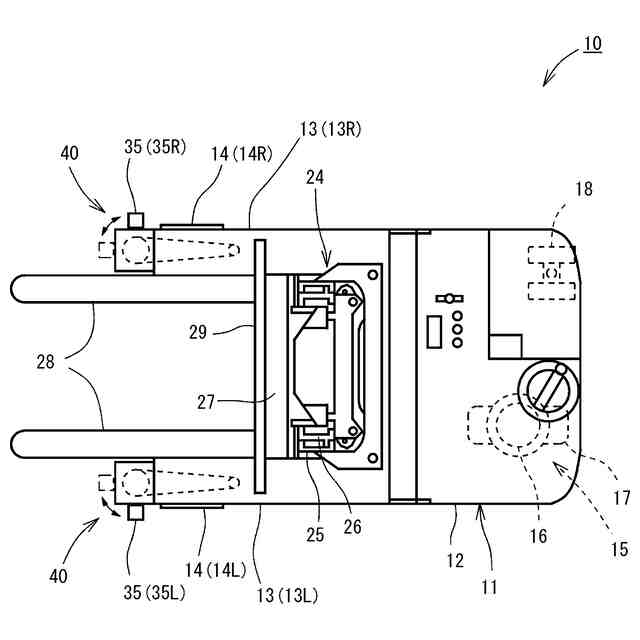
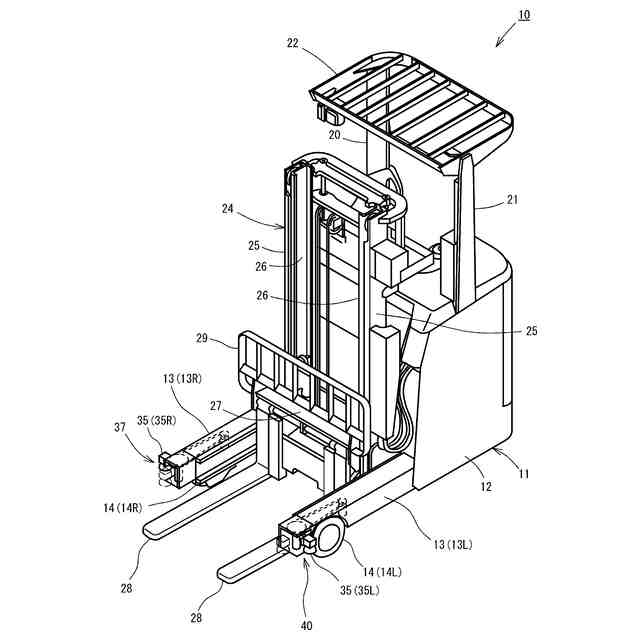
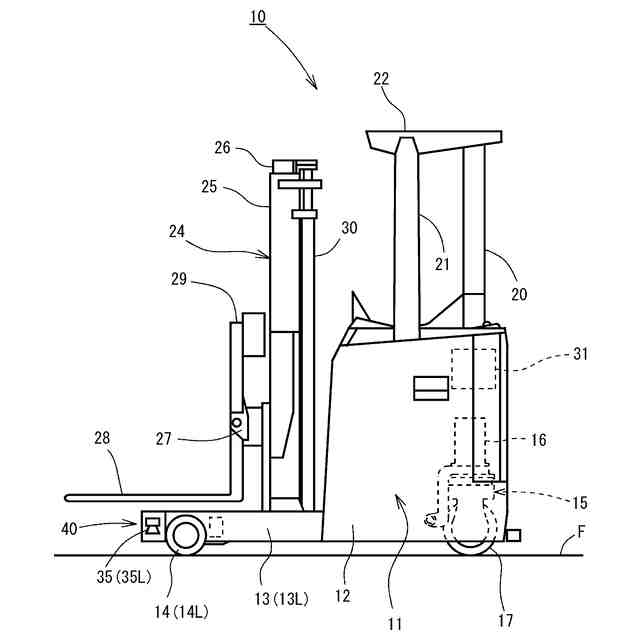
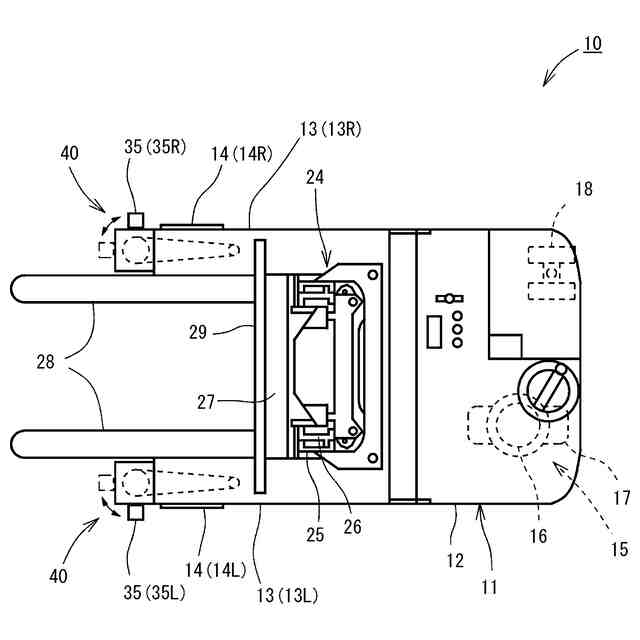
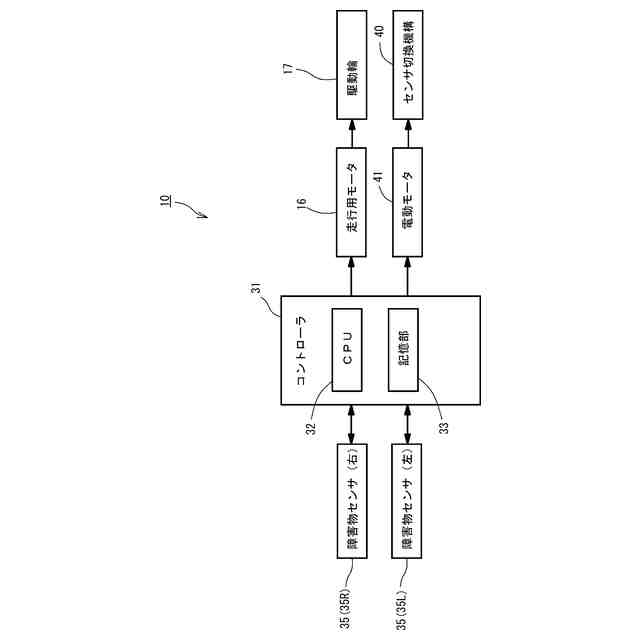
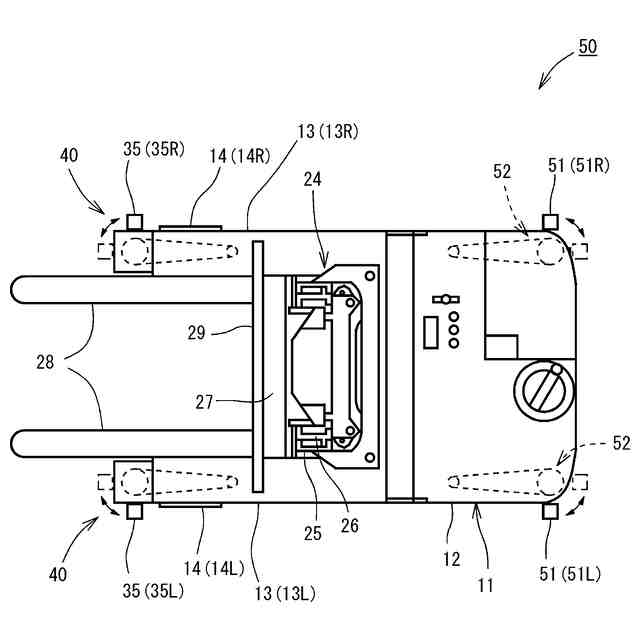
【解決手段】車体11と、車体11の前部の左右のコーナー部にそれぞれ備えられる障害物センサ35R、35Lと、障害物センサ35R、35Lと接続されるコントローラと、を有する無人走行体において、障害物センサ35R、35Lの位置を、車体11の外側へはみ出す第1位置と車体11の外側からはみ出ない第2位置との間で切り換え可能とするセンサ切換機構40と、コントローラに制御され、センサ切換機構40を作動させるセンサ切換機構駆動部と、を有した。
【選択図】 図3
特許請求の範囲
【請求項1】
車体と、
前記車体の前部および後部の少なくとも一方の左右のコーナー部にそれぞれ備えられ、障害物を検知する障害物センサと、
前記障害物センサと接続されるコントローラと、を有する無人走行体において、
前記障害物センサの位置を、前記車体の外側へはみ出す第1位置と前記車体の外側からはみ出ない第2位置との間で切り換え可能とするセンサ切換機構と、
前記コントローラに制御され、前記センサ切換機構を作動させるセンサ切換機構駆動部と、を有することを特徴とする無人走行体。
続きを表示(約 620 文字)
【請求項2】
前記コントローラは、前記車体が予め設定されたエリアを走行するとき、前記障害物センサの向きを前記第1位置から前記第2位置へ切り換えることを特徴とする請求項1記載の無人走行体。
【請求項3】
前記センサ切換機構は、前記左右のコーナー部にそれぞれ立設される軸部材を有し、
前記障害物センサの位置を、前記軸部材の回動により前記第1位置と前記第2位置との間で切り換え可能とすることを特徴とする請求項1又は2記載の無人走行体。
【請求項4】
前記コントローラは、前記障害物センサの位置を切り換えるとき前記障害物センサの検知範囲を変更することを特徴とする請求項1又は2記載の無人走行体。
【請求項5】
前記車体は、
車体本体と、
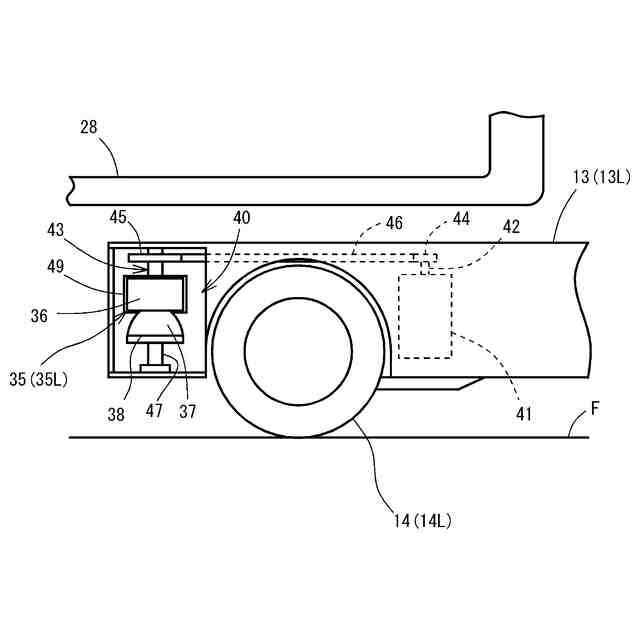
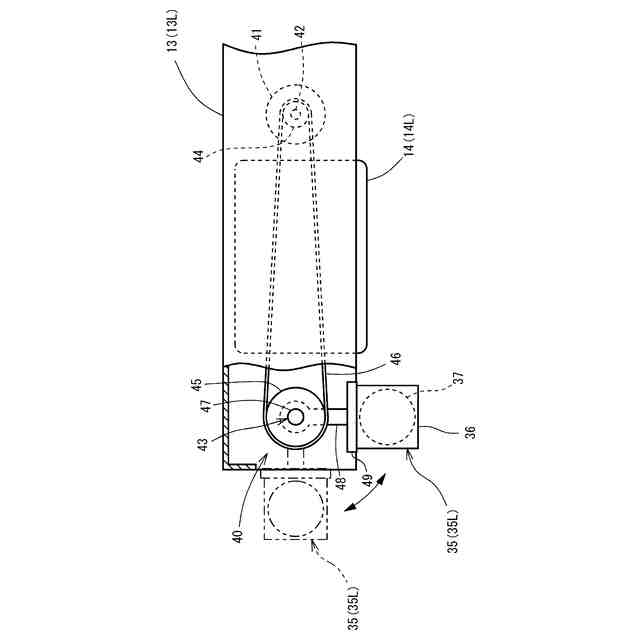
前記車体本体から前方へ向けて延在し、前輪をそれぞれ備える左右一対のリーチレグと、を有し、
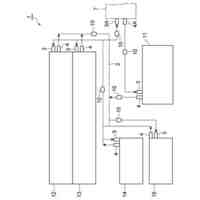
前記センサ切換機構駆動部は、前記リーチレグに収容された電動モータであり、
前記センサ切換機構は、
前記リーチレグの前端に備えられる前記軸部材と、
前記リーチレグに収容され、前記電動モータに同軸状に備えられる駆動プーリと、
前記リーチレグに収容され、前記軸部材に同軸状に備えられる従動プーリと、
前記駆動プーリと前記従動プーリに掛装される伝動ベルトと、を有することを特徴とする請求項3記載の無人走行体。
発明の詳細な説明
【技術分野】
【0001】
この発明は、無人走行体に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
無人走行体に関係する従来技術として、例えば、特許文献1に開示された自動運転フォークリフトが知られている。特許文献1に開示された自動運転フォークリフトは、無人で自律走行可能であり、複数の障害物検出装置を備えている。自動運転フォークリフトの前下端に設けられた障害物検出装置は、車幅を有して前方に延びる平面状の検出領域を有している。また、車体の右下端に設けられた障害物検出装置は、右方に所定距離まで延びる平面状の検出領域を有している。さらに、車体の左下端に設けられた障害物検出装置は、左右方に所定距離まで延びる平面状の検出領域を有している。
【先行技術文献】
【特許文献】
【0003】
特開2019-105995号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示された自動運転フォークリフトには、車体の左下端および右下端に設けられた障害物検出装置は、車体から外側へはみ出ているので、車幅が余分に大きくなるという問題がある。このため、自動運転フォークリフトが通路を通過できるように通路幅を拡大する必要がある。また、通路幅が拡大できない場合には、自動運転フォークリフトは通路を走行することができなくなる。
【0005】
本発明は上記の問題点に鑑みてなされたもので、本発明の目的は、車体の幅に対応する通路を通過できるほか、車体の幅が制約を受けない場合には、効率的な走行を実現できる無人走行体の提供にある。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本発明は、車体と、前記車体の前部および後部の少なくとも一方の左右のコーナー部にそれぞれ備えられ、障害物を検知する障害物センサと、前記障害物センサと接続されるコントローラと、を有する無人走行体において、前記障害物センサの位置を、前記車体の外側へはみ出す第1位置と前記車体の外側からはみ出ない第2位置との間で切り換え可能とするセンサ切換機構と、前記コントローラに制御され、前記センサ切換機構を作動させるセンサ切換機構駆動部と、を有することを特徴とする。
【0007】
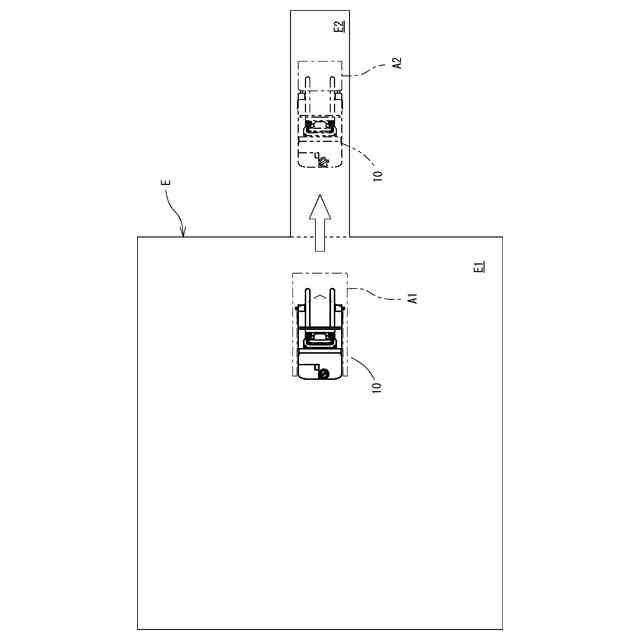
本発明では、センサ切換機構が、障害物センサの位置を車体の外側へはみ出す第1位置と車体の外側からはみ出ない第2位置との間で切り換える。このため、障害物センサの位置が車体の外側へはみ出す第1位置では、無人走行体は制約を受けることなく効率的な荷役作業を行うことができる。また、障害物センサの位置を車体の外側へはみ出す第1位置から車体の外側からはみ出ない第2位置へ切り換えることで、車体の幅に対応する通路を走行することができる。
【0008】
また、上記の無人走行体において、前記コントローラは、前記車体が予め設定されたエリアを走行するとき、前記障害物センサの向きを前記第1位置から前記第2位置へ切り換える構成としてもよい。
この場合、予め設定されたエリアを車体が走行するとき、障害物センサの向きを第1位置から第2位置へ切り換えることで、予め設定されたエリアでは無人走行体は障害物センサのはみ出しを気にすることなく走行できる。
【0009】
また、上記の無人走行体において、前記センサ切換機構は、前記左右のコーナー部にそれぞれ立設される軸部材を有し、前記障害物センサの位置を、前記軸部材の回動により前記第1位置と前記第2位置との間で切り換え可能とする構成としてもよい。
この場合、障害物センサは軸部材を回動支点として回動することができ、回動により第1位置と第2位置の切り換えを行うことができる。
【0010】
また、上記の無人走行体において、前記コントローラは、前記障害物センサの位置を切り換えるとき前記障害物センサの検知範囲を変更する構成としてもよい。
この場合、障害物センサの位置を切り換えるとき、障害物センサの検知範囲が変更されるので、障害物センサの位置を切り換えによって第1位置および第2位置に応じた適切な障害物の検知範囲を設定することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
2か月前
ugo株式会社
移動体
2か月前
個人
無人作業システム
17日前
村田機械株式会社
産業機械
1か月前
アズビル株式会社
制御装置
10日前
神港テクノス株式会社
制御装置
2か月前
株式会社ダイヘン
移動体
2か月前
株式会社ダイヘン
移動体
2か月前
トヨタ自動車株式会社
自律移動体
1か月前
トヨタ自動車株式会社
自律移動体
2か月前
コフロック株式会社
流量制御装置
11日前
トヨタ自動車株式会社
搬送ロボット
3か月前
株式会社クボタ
作業車
1か月前
株式会社丸和製作所
入力機器
10日前
トヨタ自動車株式会社
配送システム
2か月前
株式会社フジキン
流量制御装置
10日前
株式会社明電舎
車両
1か月前
株式会社フジキン
流体制御装置
2か月前
株式会社豊田自動織機
荷役車両
3日前
アズビル株式会社
パラメータ調整装置
1か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社村田製作所
温度補償回路
17日前
株式会社ダイフク
搬送設備
18日前
トヨタ自動車株式会社
位置推定システム
2か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
トヨタ自動車株式会社
自律移動システム
2か月前
株式会社FUJI
工作機械の操作システム
3か月前
キヤノン株式会社
情報処理装置
1か月前
株式会社ダイフク
物品搬送設備
24日前
ローム株式会社
電源回路
2か月前
ローム株式会社
電源回路
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
18日前
株式会社ダイフク
物品搬送設備
18日前
村田機械株式会社
搬送車システム
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ