TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025001968
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023101797
出願日
2023-06-21
発明の名称
ロボットシステム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G05D
1/43 20240101AFI20241226BHJP(制御;調整)
要約
【課題】ターゲットの位置姿勢を精度よく推定することができるロボットシステムを提供する。
【解決手段】上面視において、互いに離間して配置された2つのオブジェクトと、一方からターゲット3に接近するロボット100と、を備え、ロボットは、2つのオブジェクトを検出するセンサを備え、2つのオブジェクトの間のセグメントを横切らないように基準フレームを設定し、2つのオブジェクトを第1オブジェクト及び第2オブジェクトと定義するために、基準フレームに対する角度によって、2つのオブジェクトの順番を決定し、前記ロボットは、第1オブジェクトから第2オブジェクトに向かう方向に基づいてターゲットの位置姿勢を推定する。
【選択図】図1
特許請求の範囲
【請求項1】
ターゲットに設けられ、上面視において、互いに離間して配置された2つのオブジェクトと、
一方から前記ターゲットに接近するロボットと、を備え、
前記ロボットは、
前記2つのオブジェクトを検出するセンサを備え、
前記2つのオブジェクトの間のセグメントを横切らないように基準フレームを設定し、
前記2つのオブジェクトを第1オブジェクト及び第2オブジェクトと定義するために、前記基準フレームに対する角度によって、前記2つのオブジェクトの順番を決定し、
前記ロボットは、前記第1オブジェクトから前記第2オブジェクトに向かう方向に基づいてターゲットの位置姿勢を推定するロボットシステム。
続きを表示(約 360 文字)
【請求項2】
前記ロボットが、前記第1オブジェクトから前記第2オブジェクトに延びる座標軸を設定する請求項1に記載のロボットシステム。
【請求項3】
前記第1オブジェクトから前記第2オブジェクトに延びる座標軸に基づいて、前記ロボットが、前記ターゲットに接近する方向を設定する請求項2に記載のロボットシステム。
【請求項4】
前記センサが測定光を走査するLiDARを有しており、前記2つのオブジェクトを順番に検出する請求項1~3のいずれか1項に記載のロボットシステム。
【請求項5】
前記センサが
前記第1オブジェクトを検出する第1のLiDARと、前記第2オブジェクトを検出する第2のLiDARと、を備えた請求項1~3のいずれか1項に記載のロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1は、充電器に向かって移動するロボット装置が開示されている。充電器は、主マーカと副マーカの2つのマーカを備えている。ロボット装置は、カメラでマーカを撮像している。カメラ画像から充電器の方向及び距離を求めて充電器のエントランスポイントに向かっている。
【先行技術文献】
【特許文献】
【0003】
特開2003-285288号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
充電器などのターゲットの位置姿勢を推定するために、ターゲットの周辺に位置決め用のオブジェクトを配置することがある。この場合、ターゲットの向きがあいまいになり、誤った側から接近してしまうおそれがある。
【0005】
本開示は、このような問題点に鑑みてなされたものであり、ターゲットに適切な方向から接近することができるロボットシステムを提供する。
【課題を解決するための手段】
【0006】
本開示の一態様のロボットシステムは、ターゲットに設けられ、上面視において、互いに離間して配置された2つのオブジェクトと、一方から前記ターゲットに接近するロボットと、を備え、前記ロボットは、前記2つのオブジェクトを検出するセンサを備え、前記2つのオブジェクトの間のセグメントを横切らないように基準フレームを設定し、前記2つのオブジェクトを第1オブジェクト及び第2オブジェクトと定義するために、前記基準フレームに対する角度によって、前記2つのオブジェクトの順番を決定し、前記ロボットは、前記第1オブジェクトから前記第2オブジェクトに向かう方向に基づいてターゲットの位置姿勢を推定する。
【発明の効果】
【0007】
本開示によれば、ターゲットに適切な方向から接近することができるロボットシステムを提供することができる。
【図面の簡単な説明】
【0008】
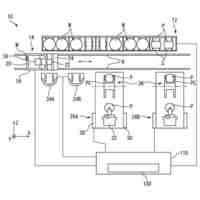
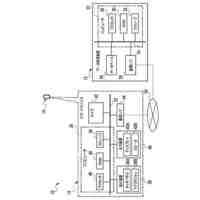
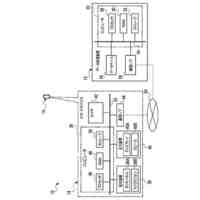
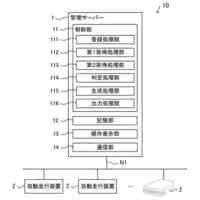
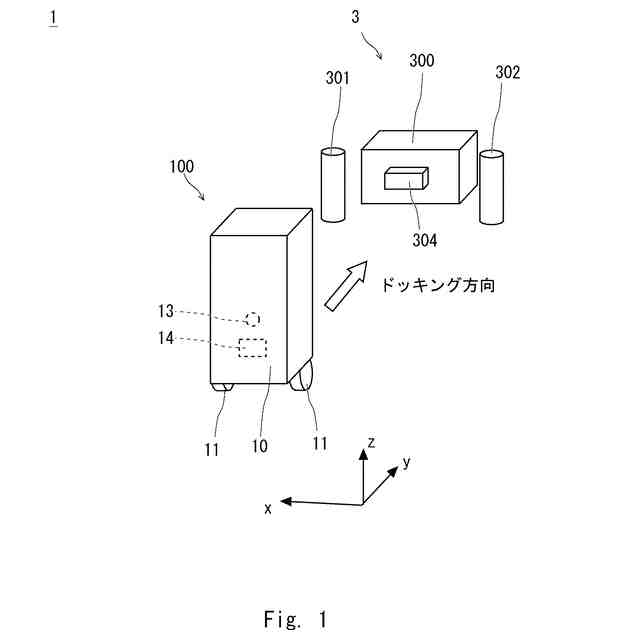
ロボットシステムの全体構成を示す模式図である。
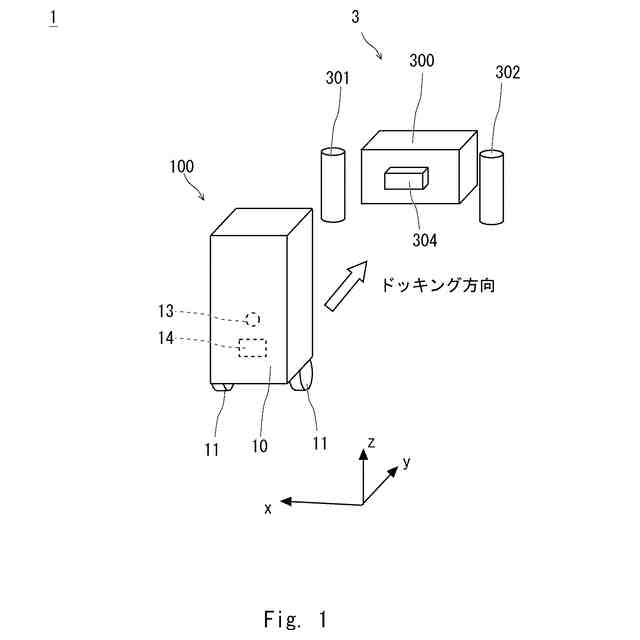
ポール間に設定されたx軸を説明するための平面図である。
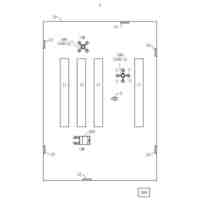
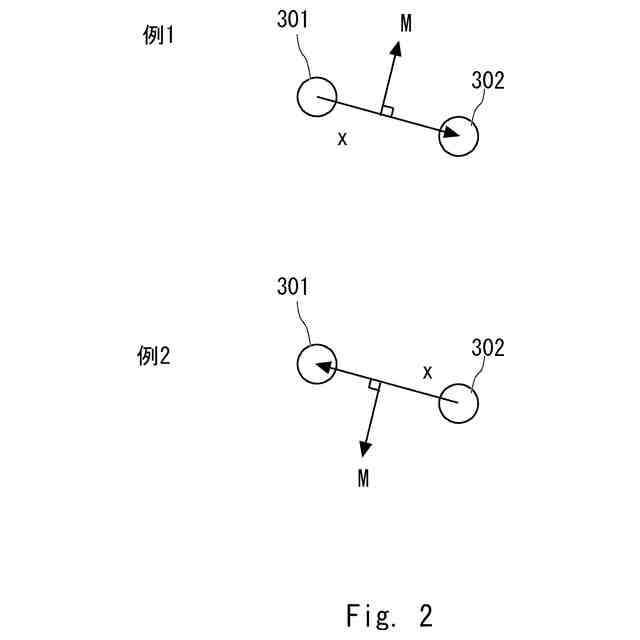
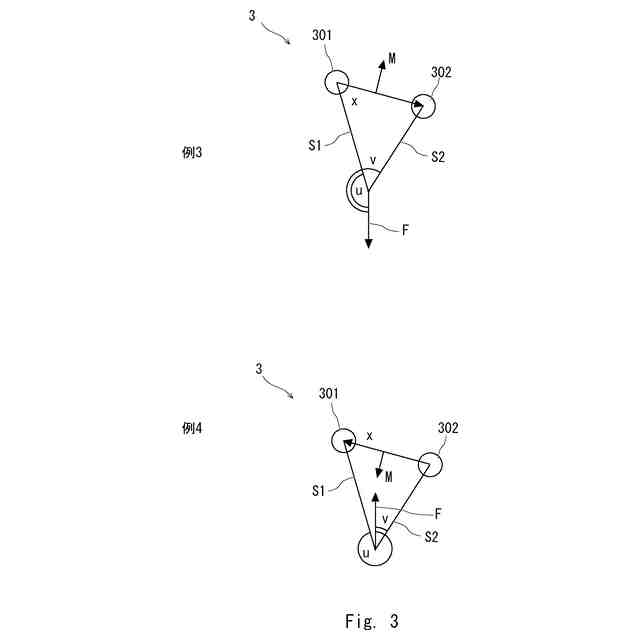
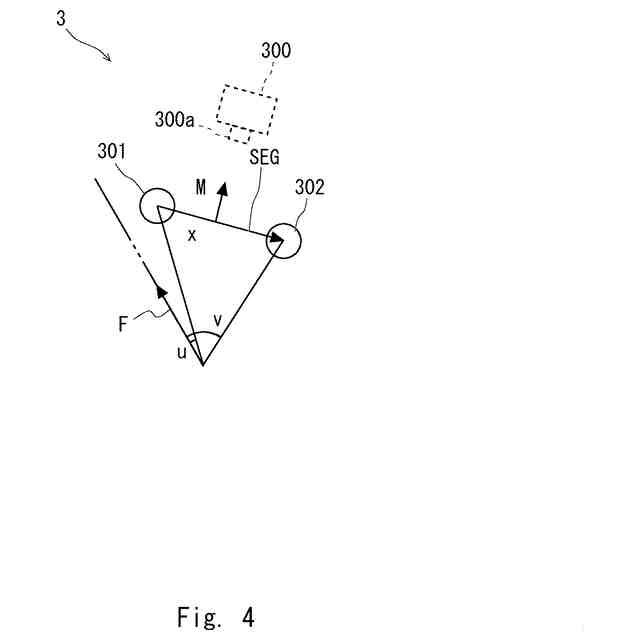
基準フレームの設定例を示す平面図である。
基準フレームの設定例を示す平面図である。
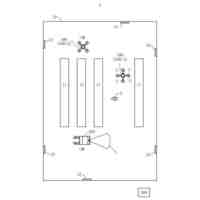
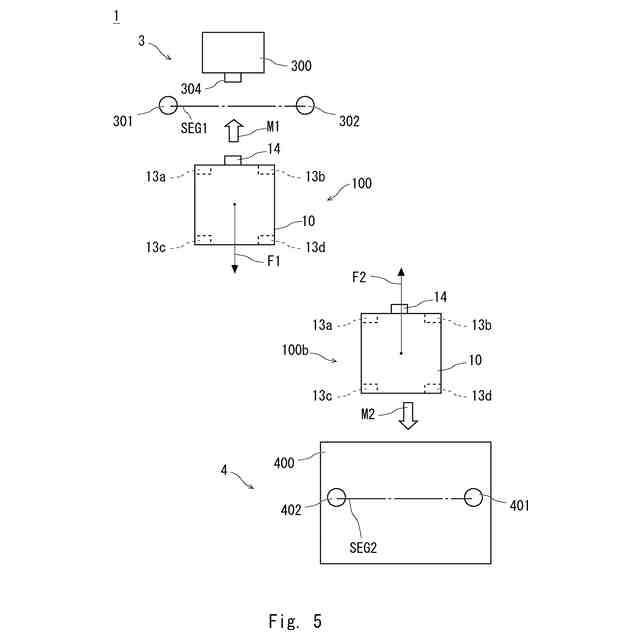
ロボットが行うタスクを説明するための平面図である。
【発明を実施するための形態】
【0009】
以下、本開示を適用した具体的な実施の形態について、図面を参照しながら詳細に説明する。但し、本開示が以下の実施の形態に限定される訳ではない。また、説明を明確にするため、以下の記載及び図面は、適宜、簡略化されている。
【0010】
以下、図面を参照して実施形態に係るロボットシステム1について説明する。図1は、ロボットシステム1の全体構成を示す模式図である。なお、以下の説明では、xyz3次元直交座標系を用いて説明を行う。xy平面をロボット100が走行する床面(水平面)とする。z方向を鉛直方向とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
和研工業株式会社
多連レバー機構
7日前
ローム株式会社
半導体集積回路
2日前
愛知機械テクノシステム株式会社
無人搬送車
16日前
アズビル株式会社
制御システムおよび制御方法
8日前
アズビル株式会社
制御システムおよび制御方法
17日前
アズビル株式会社
制御システムおよび制御方法
8日前
日本精工株式会社
制御装置および制御方法
14日前
トヨタ自動車株式会社
群制御システム及び群制御方法
16日前
村田機械株式会社
稼働監視システム及び稼働監視方法
17日前
ミツミ電機株式会社
多方向入力装置
14日前
ミツミ電機株式会社
多方向入力装置
14日前
ミツミ電機株式会社
多方向入力装置
14日前
ミツミ電機株式会社
多方向入力装置
14日前
ミツミ電機株式会社
多方向入力装置
14日前
HEROZ株式会社
異常検知アルゴリズムの評価システム
16日前
株式会社TMEIC
リモートI/Oステーション
8日前
岩井ファルマテック株式会社
監査証跡の管理システム
3日前
ローム株式会社
レギュレータ回路
1日前
株式会社牧野フライス製作所
生産システム
9日前
ソフトバンクグループ株式会社
システム
1日前
トヨタ自動車株式会社
車両用ペダル装置
1日前
三菱ロジスネクスト株式会社
防衛システム
1日前
三菱ロジスネクスト株式会社
防衛システム
1日前
ソフトバンクグループ株式会社
システム
1日前
ソフトバンクグループ株式会社
システム
1日前
オークマ株式会社
サイクルタイム算出装置
16日前
住友重機械工業株式会社
制御装置、ゲイン自動調整方法、記憶媒体
10日前
トヨタ自動車株式会社
制御装置および制御方法
7日前
株式会社東芝
異常検知装置、方法及びプログラム
10日前
シャープ株式会社
走行システム、走行方法、及び走行プログラム
8日前
富士電機機器制御株式会社
生産設備稼働監視システム及びデータ処理装置
3日前
キヤノン株式会社
移動体、制御方法、及びコンピュータプログラム
2日前
ローム株式会社
制御装置、コントローラおよび電子制御装置
2日前
CKD株式会社
蓄熱ユニット状態監視システム
7日前
日立チャネルソリューションズ株式会社
移動体及び移動体の位置検出方法
16日前
三菱重工業株式会社
移動体制御システム及び情報処理方法
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ