TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025044599
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023152278
出願日
2023-09-20
発明の名称
移動体、制御方法、及びコンピュータプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250326BHJP(制御;調整)
要約
【課題】
1つのワークフローを実行中に複数の指示者から指示を受け付けることが可能な移動体を提供する。
【解決手段】
所定の指示に基づき、所定のワークフローを実行するために所定の経路で複数の目的地への移動が可能な移動体であって、前記ワークフローの実行中に、複数の前記目的地の少なくとも1つの前記目的地の周辺において認識した人物を指示者として登録する登録手段と、前記登録手段により登録された前記指示者の命令を受け付ける受付手段と、を有することを特徴とする。
【選択図】 図2
特許請求の範囲
【請求項1】
所定の指示に基づき、所定のワークフローを実行するために所定の経路で複数の目的地への移動が可能な移動体であって、
前記ワークフローの実行中に、複数の前記目的地の少なくとも1つの前記目的地の周辺において認識した人物を指示者として登録する登録手段と、
前記登録手段により登録された前記指示者の命令を受け付ける受付手段と、を有することを特徴とする移動体。
続きを表示(約 850 文字)
【請求項2】
前記受付手段は、前記登録された前記指示者からの前記指示を受け付けることで前記指示を実行可能とすることを特徴とする請求項1に記載の移動体。
【請求項3】
前記登録手段は、前記ワークフローの実行中に、前記目的地の前記周辺以外では、前記登録を行わないことを特徴とする請求項1に記載の移動体。
【請求項4】
前記受付手段は、前記ワークフローの実行中に、登録されている前記指示者以外の命令を受け付けないことを特徴とする請求項1に記載の移動体。
【請求項5】
前記登録手段は、前記ワークフローが完了した場合に、前記ワークフローの実行中に登録された前記指示者の少なくとも1部を消去することを特徴とする請求項1に記載の移動体。
【請求項6】
前記登録手段は、前記ワークフローが完了した場合に、前記ワークフローの実行中に登録された前記指示者の少なくとも一部を消去しないように選択可能であることを特徴とする請求項1に記載の移動体。
【請求項7】
前記ワークフローの実行中に、前記登録手段により登録された前記指示者以外の人を、次の前記ワークフローにおける前記指示者として予約登録可能であることを特徴とする請求項1に記載の移動体。
【請求項8】
前記ワークフローの実行中に、次に移動する場所を、前記登録手段により登録された前記指示者が指定可能であることを特徴とする請求項1に記載の移動体。
【請求項9】
前記登録手段は、前記目的地の周辺において認識した前記人物の所定のジェスチャー、前記人物の音声、又はボタン操作の少なくとも1つに基づき前記人物を前記指示者として登録することを特徴とする請求項1に記載の移動体。
【請求項10】
前記指示者を追跡するための広角の撮像が可能な撮像手段を有することを特徴とする請求項1に記載の移動体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体、制御方法、及びコンピュータプログラムに関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、ユーザーを所望の場所に案内したり、荷物を搬送したりする自動搬送ロボットや自律走行ロボット、が知られている。特に自律走行ロボットにおいて、特許文献1には、上記のようなサービスを提供する際に人との距離を所定距離に保って移動する移動ロボットが開示されている。又、特許文献2には先ず人を撮影して、撮影した人のジェスチャー操作を受け付ける技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第5617562号公報
特開2022-132905号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の特許文献1、特許文献2に開示された従来技術では、単一の特定の命令を出す者(以下、指示者)の指示を受けるが、一連の動作中に複数人の指示者の命令を受けることはできない。又、離れた地点にいる複数の指示者間を移動するタスクを実行するために、予め全ての指示者を登録する必要があり、柔軟な運用ができない。
【0005】
そこで本発明の目的は、1つのワークフローを実行中に複数の指示者から指示を受け付けることが可能な移動体を提供することである。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の1つ側面は、所定の指示に基づき、所定のワークフローを実行するために所定の経路で複数の目的地への移動が可能な移動体であって
前記ワークフローの実行中に、複数の前記目的地の少なくとも1つの前記目的地の周辺において認識した人物を指示者として登録する登録手段と、
前記登録手段により登録された前記指示者の命令を受け付ける受付手段と、を有することを特徴とする。
【発明の効果】
【0007】
本発明によれば、1つのワークフローを実行中に複数の指示者から指示を受け付けることが可能な移動体を提供できる。
【図面の簡単な説明】
【0008】
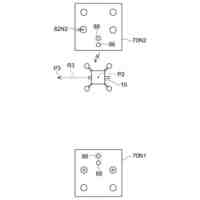
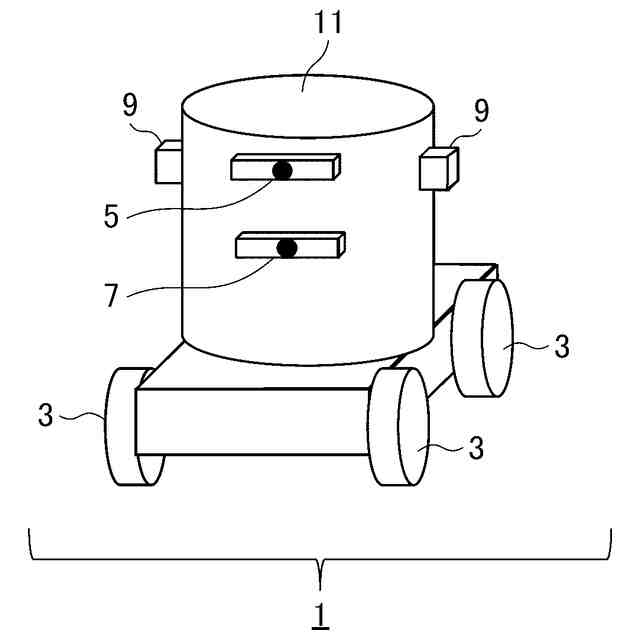
実施形態1における移動体1の概略構成を示す斜視図である。
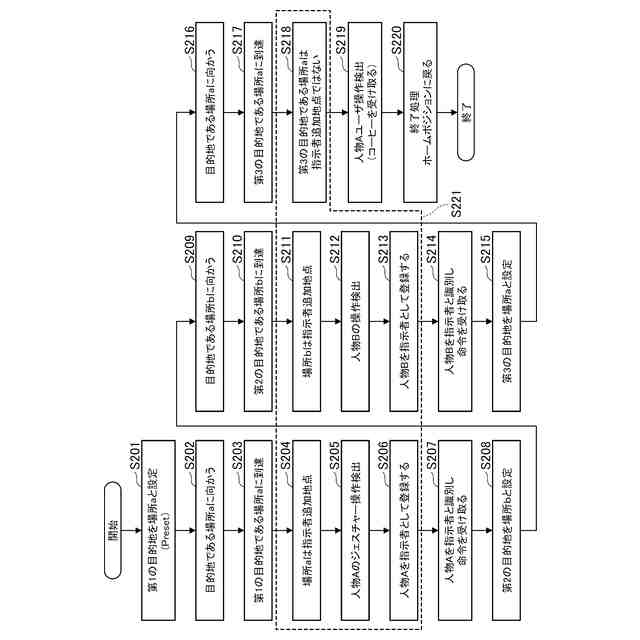
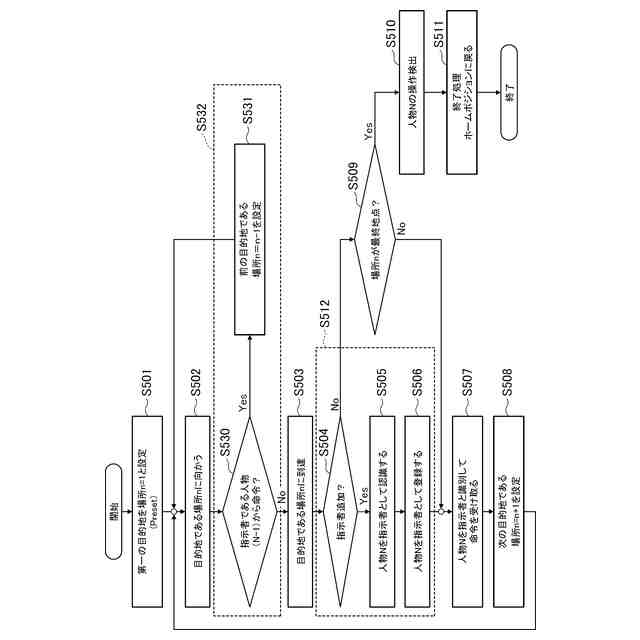
実施形態1における移動体1の制御方法の例を具体的に説明するためのフローチャートである。
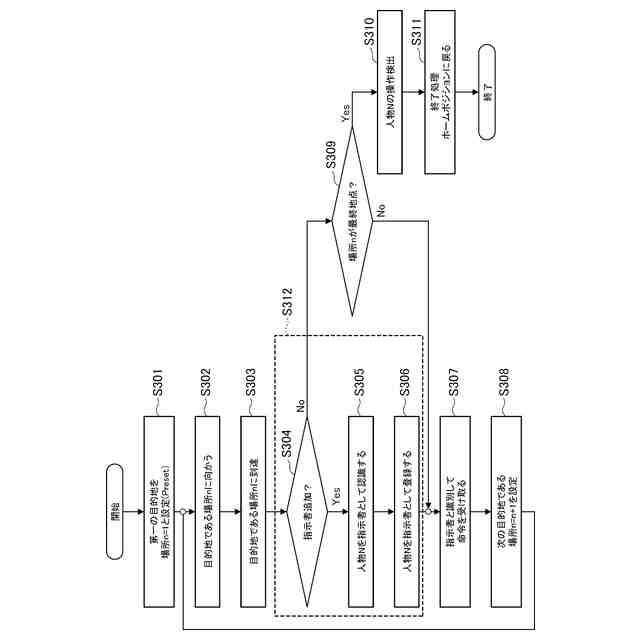
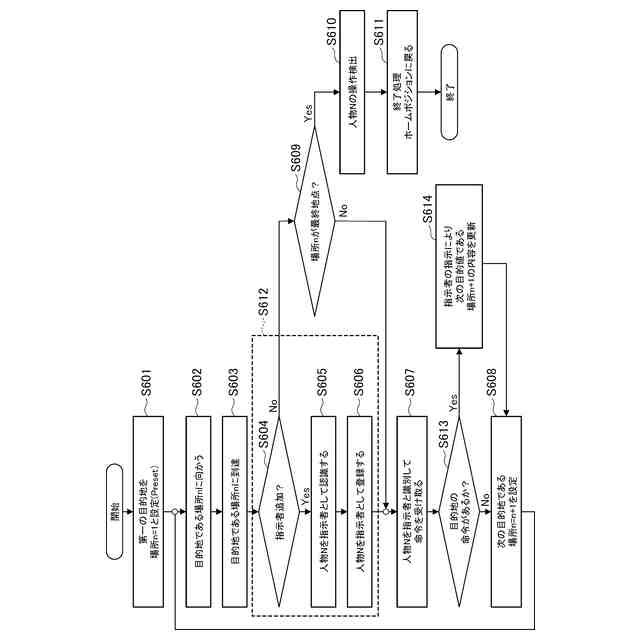
実施形態1における移動体1の制御方法を一般化して説明するためフローチャートである。
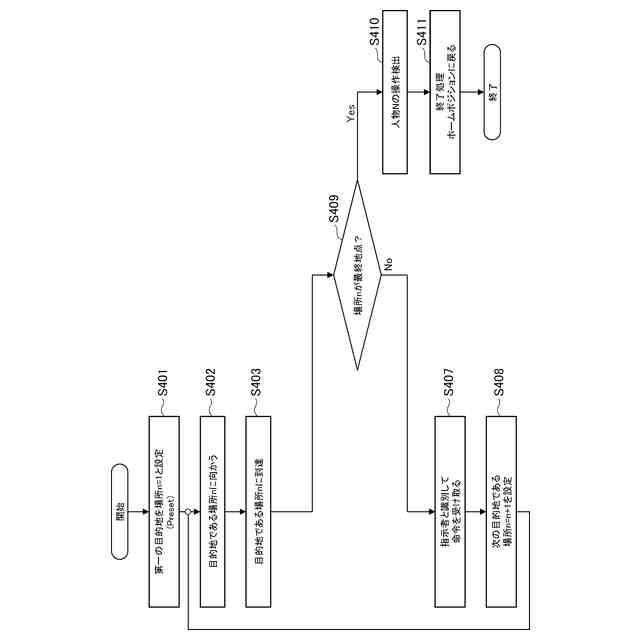
実施形態2における移動体1の制御方法を示すフローチャートである。
実施形態3の制御方法を示すフローチャートである。
実施形態4の制御方法を示すフローチャートである。
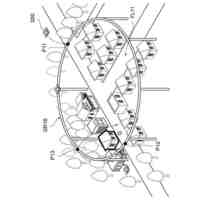
実施形態5に係る撮像部を有する移動体を説明するための図である。
実施形態5に係る撮像部を有する移動体からの画像の例を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して本発明の実施形態を説明する。但し、本発明は以下の実施形態に限定されるものではない。尚、図面において、同一の部材又は要素については同一の参照番号を付し、それらの重複する説明については省略又は簡略化する。
<実施形態1>
【0010】
図1は、実施形態1における移動体1の概略構成を示す斜視図である。図1において、1は移動体、3は走行部、5は撮像部、7は地図情報取得部、9は受音部、11は荷台部である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三共木工株式会社
遠隔操作システム、遠隔操作装置、及び遠隔操作対象
1日前
有限会社村上不動産鑑定士事務所
無人航空機管理システム
1日前
キヤノン株式会社
情報処理装置、制御方法及びプログラム
1日前
株式会社東芝
半導体装置
1日前
他の特許を見る


 特許ウォッチ
特許ウォッチ