TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025042248
公報種別
公開特許公報(A)
公開日
2025-03-27
出願番号
2023149141
出願日
2023-09-14
発明の名称
走行システム、走行方法、及び走行プログラム
出願人
シャープ株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250319BHJP(制御;調整)
要約
【課題】搬送対象を搬送可能な自動走行装置の走行効率を向上させることが可能な走行システム、走行方法、及び走行プログラムを提供する。
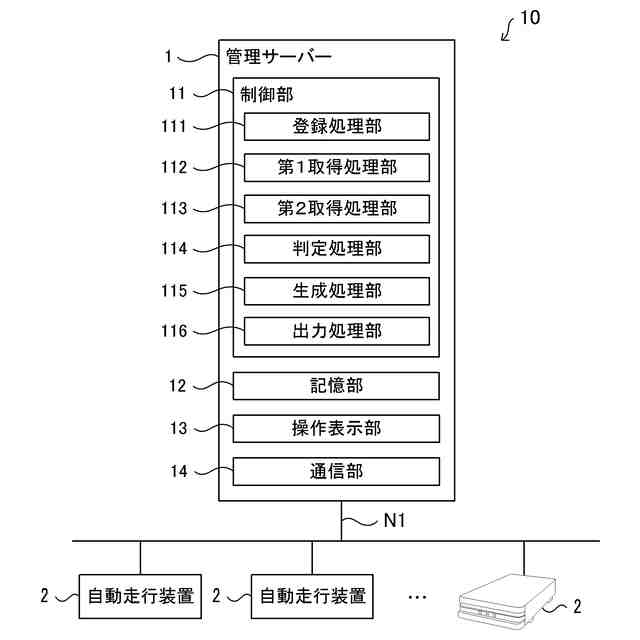
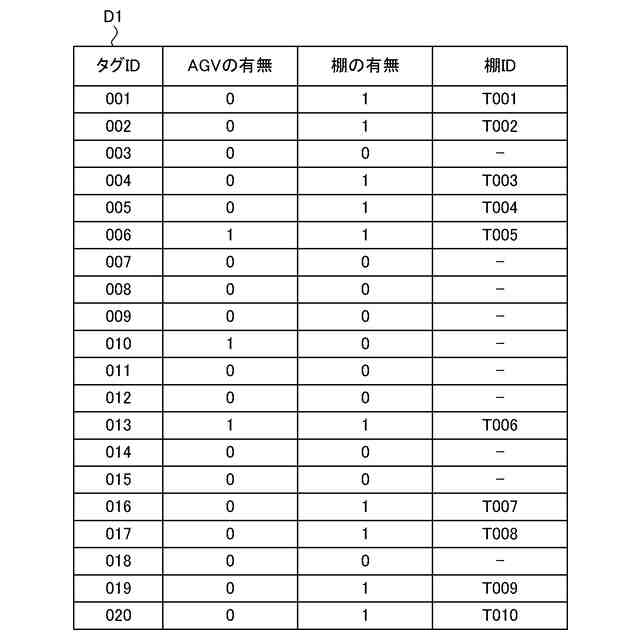
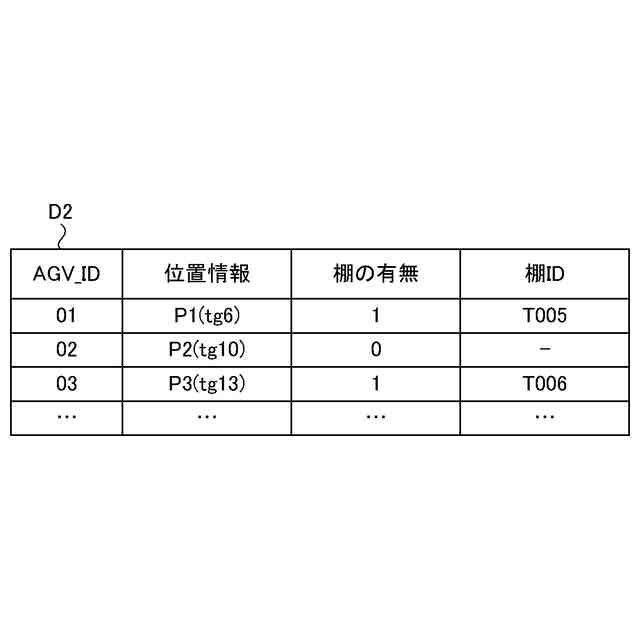
【解決手段】第1取得処理部112は、搬送対象がタグに対応する位置に存在するか否かを表す情報と、自動走行装置2が前記タグに対応する位置に存在するか否かを表す情報とを含むタグステータス情報D1を取得する。第2取得処理部113は、自動走行装置2が前記搬送対象を搬送中であるか否かを表すAGVステータス情報D2を取得する。判定処理部114は、タグステータス情報D1とAGVステータス情報D2とに基づいて、自動走行装置2がタグtgに対応する位置を走行可能であるか否かを判定する。生成処理部115は、判定処理部114の判定結果に基づいて、自動走行装置2の走行経路を生成する。
【選択図】図1
特許請求の範囲
【請求項1】
床面に配置された複数のタグを順次検出して走行し、前記複数のタグの一部である保管位置指定タグに対応する位置に保管された搬送対象を指定位置まで搬送可能な自動走行装置の走行を制御する走行システムであって、
前記搬送対象が前記保管位置指定タグに対応する位置に存在するか否かを表す情報と、前記自動走行装置が前記保管位置指定タグに対応する位置に存在するか否かを表す情報とを含む、保管位置指定タグ状態情報を取得する第1取得処理部と、
前記自動走行装置が前記搬送対象を搬送中であるか否かを表す自動走行装置状態情報を取得する第2取得処理部と、
前記保管位置指定タグ状態情報と前記自動走行装置状態情報とに基づいて、前記自動走行装置が前記保管位置指定タグに対応する位置を走行可能であるか否かを判定する判定処理部と、
前記判定処理部の判定結果に基づいて、前記自動走行装置の走行経路を生成する生成処理部と、
を備える走行システム。
続きを表示(約 1,600 文字)
【請求項2】
前記保管位置指定タグ状態情報を前記タグの識別情報に関連付けて登録し、前記自動走行装置状態情報を前記自動走行装置の識別情報に関連付けて登録する登録処理部をさらに備える、
請求項1に記載の走行システム。
【請求項3】
前記保管位置指定タグは、前記搬送対象の保管位置ごとに複数配置されており、
前記第1取得処理部は、複数の前記保管位置指定タグのそれぞれに対応する前記保管位置指定タグ状態情報を取得する、
請求項1に記載の走行システム。
【請求項4】
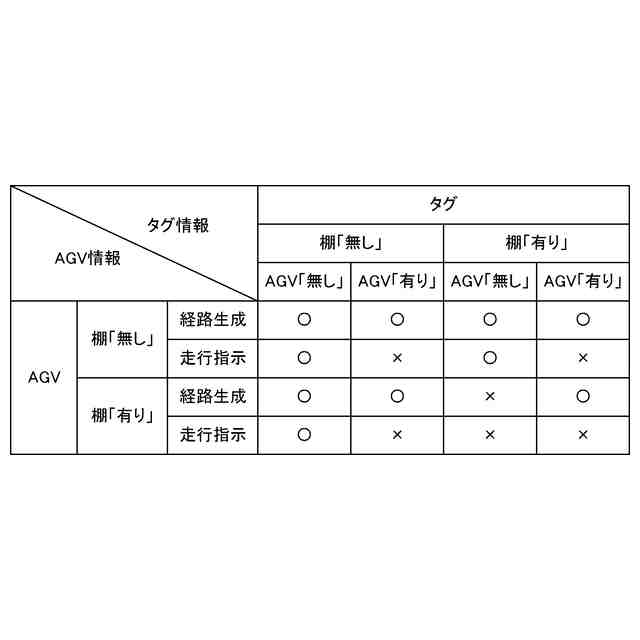
前記判定処理部は、前記自動走行装置状態情報と前記保管位置指定タグ状態情報とに基づいて、前記保管位置指定タグを、前記自動走行装置が通行可能な走行可能タグ、又は、前記自動走行装置が通行不可能な走行不可能タグに設定し、
前記生成処理部は、前記走行可能タグを含み、かつ前記走行不可能タグを含まない前記走行経路を生成する、
請求項1に記載の走行システム。
【請求項5】
前記搬送対象が前記保管位置指定タグに対応する位置に配置されておらず、かつ、前記自動走行装置が前記保管位置指定タグに対応する位置に存在しない場合に、前記判定処理部は、前記保管位置指定タグを前記走行可能タグに設定する、
請求項4に記載の走行システム。
【請求項6】
前記搬送対象が前記保管位置指定タグに対応する位置に配置されておらず、かつ、前記自動走行装置が前記保管位置指定タグに対応する位置に存在する場合に、前記判定処理部は、前記保管位置指定タグを前記走行可能タグに設定する、
請求項4に記載の走行システム。
【請求項7】
前記搬送対象が前記保管位置指定タグに対応する位置に配置されており、かつ、前記自動走行装置が前記保管位置指定タグに対応する位置に存在しない場合であって、さらに、前記自動走行装置が前記搬送対象を搬送していない場合に、前記判定処理部は、前記保管位置指定タグを前記走行可能タグに設定する、
請求項4に記載の走行システム。
【請求項8】
前記搬送対象が前記保管位置指定タグに対応する位置に配置されており、かつ、前記自動走行装置が前記保管位置指定タグに対応する位置に存在しない場合であって、さらに、前記自動走行装置が前記搬送対象を搬送中である場合に、前記判定処理部は、前記保管位置指定タグを前記走行不可能タグに設定する、
請求項4に記載の走行システム。
【請求項9】
前記搬送対象が前記保管位置指定タグに対応する位置に配置されており、かつ、前記自動走行装置が前記保管位置指定タグに対応する位置に存在する場合に、前記判定処理部は、前記保管位置指定タグを前記走行可能タグに設定する、
請求項4に記載の走行システム。
【請求項10】
床面に配置された複数のタグを順次検出して走行し、前記複数のタグの一部である保管位置指定タグに対応する位置に保管された搬送対象を指定位置まで搬送可能な自動走行装置の走行を制御する走行方法であって、
前記搬送対象が前記保管位置指定タグに対応する位置に存在するか否かを表す情報と、前記自動走行装置が前記保管位置指定タグに対応する位置に存在するか否かを表す情報とを含む保管位置指定タグ状態情報を取得することと、
前記自動走行装置が前記搬送対象を搬送中であるか否かを表す自動走行装置状態情報を取得することと、
前記保管位置指定タグ状態情報と前記自動走行装置状態情報とに基づいて、前記自動走行装置が前記保管位置指定タグに対応する位置を走行可能であるか否かを判定することと、
判定結果に基づいて、前記自動走行装置の走行経路を生成することと、
を一又は複数のプロセッサーが実行する走行方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、自動走行装置を走行させる走行システム、走行方法、及び走行プログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、自動走行装置(AGV、走行車両など)を予め設定された走行経路に従って目的位置まで走行させる走行システムが知られている。例えば、物品を保管する複数の棚が決められた保管位置に保管されており、自動走行装置が保管位置に保管された棚の下に潜り込んで、棚を持ち上げて目的位置まで搬送する走行システムが知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-222465号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、従来の走行システムでは、複数の棚が配置されている領域は、自動走行装置が搬送対象の棚を引き取る(持ち上げて搬送する)ために進入する場合を除いて、進入禁止領域に設定されている。このため、複数の棚が配置されている領域を自動走行装置の走行経路として有効的に利用することができず、走行効率が低下する問題が生じる。
【0005】
本開示の目的は、搬送対象を搬送可能な自動走行装置の走行効率を向上させることが可能な走行システム、走行方法、及び走行プログラムを提供することにある。
【課題を解決するための手段】
【0006】
本開示の一の態様に係る走行システムは、床面に配置された複数のタグを順次検出して走行し、前記複数のタグの一部である保管位置指定タグに対応する位置に保管された搬送対象を指定位置まで搬送可能な自動走行装置の走行を制御する走行システムである。前記走行システムは、第1取得処理部と第2取得処理部と判定処理部と生成処理部とを備える。前記第1取得処理部は、前記搬送対象が前記保管位置指定タグに対応する位置に存在するか否かを表す情報と、前記自動走行装置が前記保管位置指定タグに対応する位置に存在するか否かを表す情報とを含む、保管位置指定タグ状態情報を取得する。前記第2取得処理部は、前記自動走行装置が前記搬送対象を搬送中であるか否かを表す自動走行装置状態情報を取得する。前記判定処理部は、前記保管位置指定タグ状態情報と前記自動走行装置状態情報とに基づいて、前記自動走行装置が前記保管位置指定タグに対応する位置を走行可能であるか否かを判定する。前記生成処理部は、前記判定処理部の判定結果に基づいて、前記自動走行装置の走行経路を生成する。
【0007】
本開示の他の態様に係る走行方法は、床面に配置された複数のタグを順次検出して走行し、前記複数のタグの一部である保管位置指定タグに対応する位置に保管された搬送対象を指定位置まで搬送可能な自動走行装置の走行を制御する方法である。前記走行方法は、前記搬送対象が前記保管位置指定タグに対応する位置に存在するか否かを表す情報と、前記自動走行装置が前記保管位置指定タグに対応する位置に存在するか否かを表す情報とを含む保管位置指定タグ状態情報を取得することと、前記自動走行装置が前記搬送対象を搬送中であるか否かを表す自動走行装置状態情報を取得することと、前記保管位置指定タグ状態情報と前記自動走行装置状態情報とに基づいて、前記自動走行装置が前記保管位置指定タグに対応する位置を走行可能であるか否かを判定することと、判定結果に基づいて、前記自動走行装置の走行経路を生成することと、を一又は複数のプロセッサーが実行する方法である。
【0008】
本開示の他の態様に係る走行プログラムは、床面に配置された複数のタグを順次検出して走行し、前記複数のタグの一部である保管位置指定タグに対応する位置に保管された搬送対象を指定位置まで搬送可能な自動走行装置の走行を制御するプログラムである。前記走行プログラムは、前記搬送対象が前記保管位置指定タグに対応する位置に存在するか否かを表す情報と、前記自動走行装置が前記保管位置指定タグに対応する位置に存在するか否かを表す情報とを含む保管位置指定タグ状態情報を取得することと、前記自動走行装置が前記搬送対象を搬送中であるか否かを表す自動走行装置状態情報を取得することと、前記保管位置指定タグ状態情報と前記自動走行装置状態情報とに基づいて、前記自動走行装置が前記保管位置指定タグに対応する位置を走行可能であるか否かを判定することと、判定結果に基づいて、前記自動走行装置の走行経路を生成することと、を一又は複数のプロセッサーに実行させるためのプログラムである。
【発明の効果】
【0009】
本開示によれば、搬送対象を搬送可能な自動走行装置の走行効率を向上させることが可能な走行システム、走行方法、及び走行プログラムを提供することができる。
【図面の簡単な説明】
【0010】
図1は、本開示の実施形態に係る走行システムの構成を示すブロック図である。
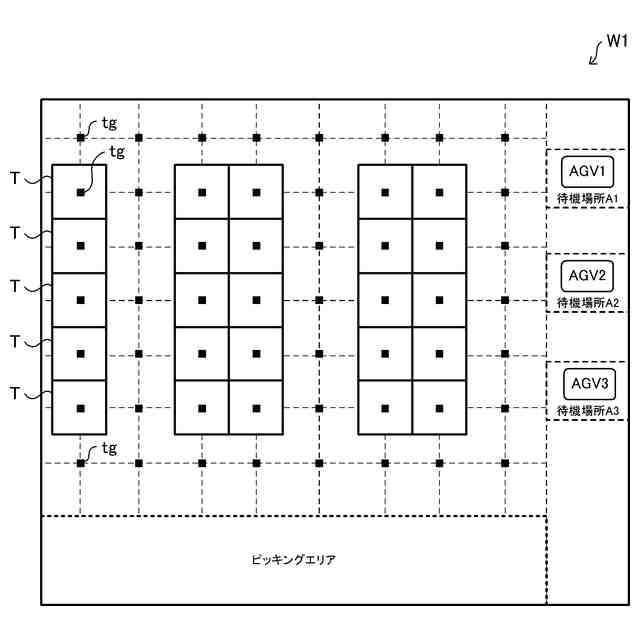
図2は、本開示の実施形態に係る走行システムが適用される施設の構成を模式的に示す図である。
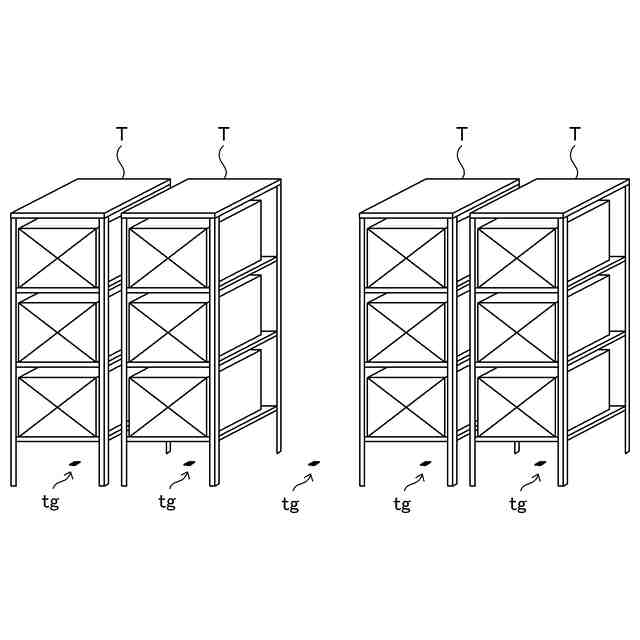
図3は、本開示の実施形態に係る走行システムが適用される施設に配置される保管棚の配置例に示す図である。
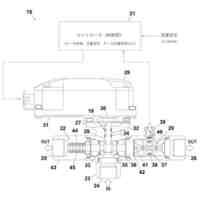
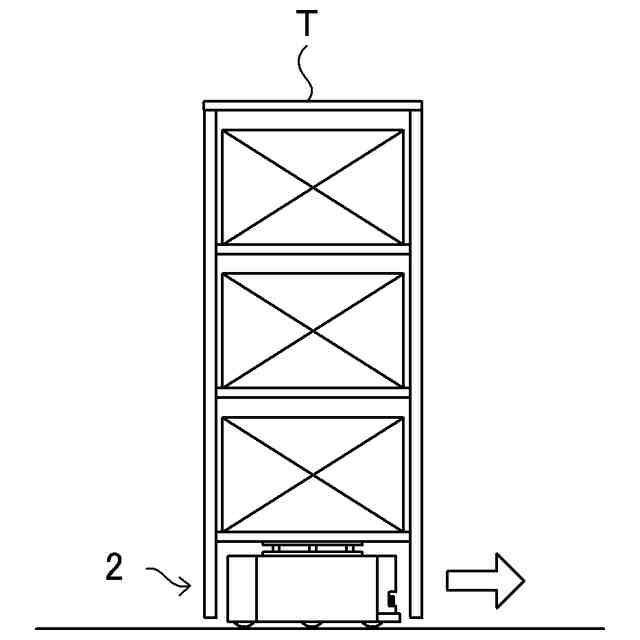
図4は、本開示の実施形態に係る自動走行装置が保管棚を搬送する状態を示す図である。
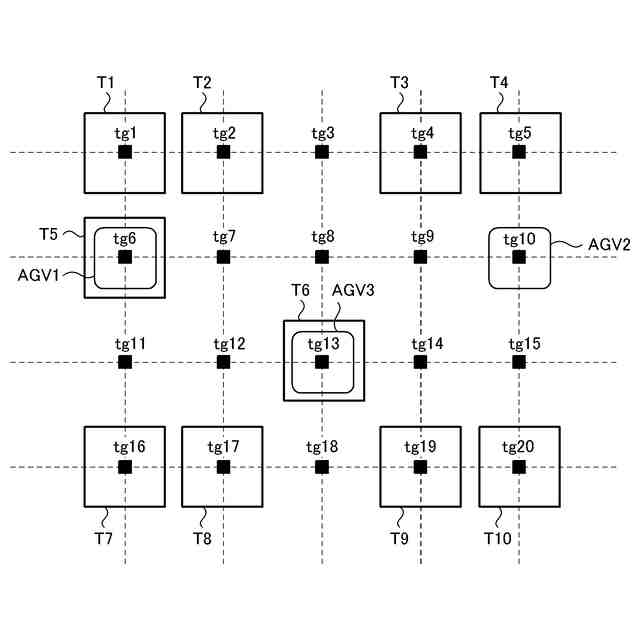
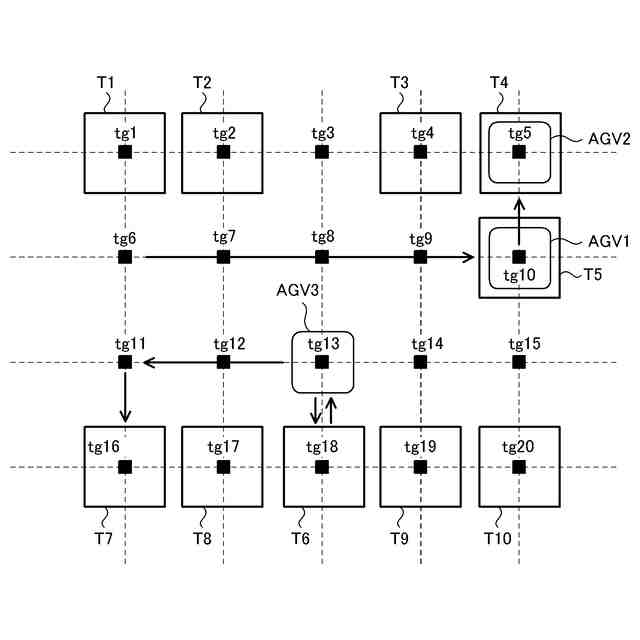
図5は、本開示の実施形態に係る走行システムが適用される施設におけるAGVの走行状況の一例を示す図である。
図6は、本開示の実施形態に係る走行システムで利用されるタグステータス情報の一例を示す図である。
図7は、本開示の実施形態に係る走行システムで利用されるAGVステータス情報の一例を示す図である。
図8は、本開示の実施形態に係る走行システムが適用される施設におけるAGVの走行状況の一例を示す図である。
図9は、本開示の実施形態に係るAGVの経路生成及び走行指示の可否を示す対応表である。
図10は、本開示の実施形態に係る走行システムで実行される走行処理の手順の一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
2か月前
村田機械株式会社
産業機械
2か月前
アズビル株式会社
制御装置
1か月前
和研工業株式会社
多連レバー機構
5日前
コフロック株式会社
流量制御装置
1か月前
トヨタ自動車株式会社
自律移動体
2か月前
スター精密株式会社
工作機械
21日前
株式会社クボタ
作業車
2か月前
株式会社丸和製作所
入力機器
1か月前
ローム株式会社
半導体集積回路
今日
株式会社明電舎
車両
2か月前
株式会社フジキン
流量制御装置
1か月前
アズビル株式会社
パラメータ調整装置
2か月前
株式会社豊田自動織機
荷役車両
1か月前
トヨタ自動車株式会社
ロボットシステム
2か月前
株式会社ダイフク
搬送設備
2か月前
株式会社シンテックホズミ
搬送ロボット
1か月前
株式会社村田製作所
温度補償回路
2か月前
トヨタ自動車株式会社
ロボットシステム
2か月前
株式会社ダイフク
物品搬送設備
2か月前
愛知機械テクノシステム株式会社
無人搬送車
14日前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
1か月前
ローム株式会社
電源回路
3か月前
株式会社ダイフク
物品搬送設備
2か月前
キヤノン株式会社
情報処理装置
2か月前
国立大学法人広島大学
モデル誤差抑制補償器
26日前
アズビル株式会社
制御システムおよび制御方法
15日前
アズビル株式会社
制御システムおよび制御方法
6日前
旭精機工業株式会社
監視データ処理装置
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
アズビル株式会社
制御システムおよび制御方法
6日前
東フロコーポレーション株式会社
流量制御装置
3か月前
日本精工株式会社
制御装置および制御方法
12日前
トヨタ自動車株式会社
自律走行装置
26日前
ブラザー工業株式会社
数値制御装置及び工作機械
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ