TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025038766
公報種別
公開特許公報(A)
公開日
2025-03-19
出願番号
2023145566
出願日
2023-09-07
発明の名称
移動体及び移動体の位置検出方法
出願人
日立チャネルソリューションズ株式会社
代理人
青稜弁理士法人
主分類
G05D
1/43 20240101AFI20250312BHJP(制御;調整)
要約
【課題】初めての場所で僅かな準備で直ちに運用ができ、高い精度で座標位置の推定を行う移動体を提供する。
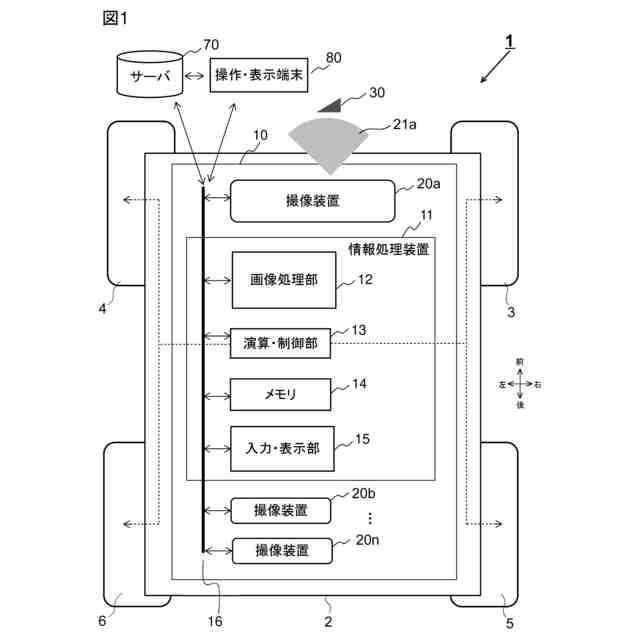
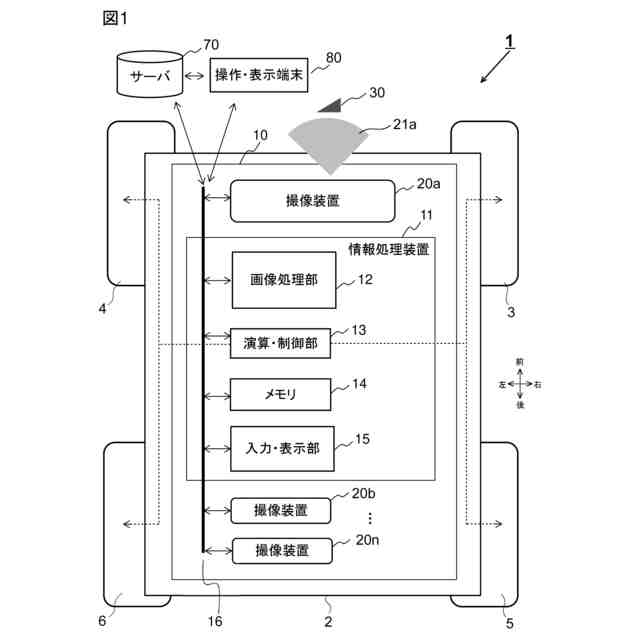
【解決手段】絶対座標位置が取得済であって操作者によって登録される1つの既知マーカ30と、絶対位置情報が不明であるが幾何学構造が既知の複数の未知マーカを組合わせて、これらを撮像装置20a、20b、…、20nでサブピクセル精度にて撮影して画像処理部12が画像検出を行う。既知マーカ30の検出により移動体1の絶対座標位置が算出できる。この際、未知マーカの絶対座標位置も算出して、未知マーカを絶対座標位置と共に新たな既知マーカとしてメモリ14に登録する。移動体1は、走行しながら既知マーカの数を自動的に増やすことができ、多数設けられた既知マーカ30を参照しつつ、高精度での自己位置推定が可能となる。
【選択図】図1
特許請求の範囲
【請求項1】
自己の位置を計測しながら作業を行う移動体であって、
前記移動体に設置され、エッジ構造情報および設置された作業空間上の位置である絶対座標情報が既知の既知マーカと、マーカの形状を示すマーカ構造情報およびエッジ構造情報は既知であるが前記絶対座標情報が未知の未知マーカと、を撮影する一つ又は複数の画像取得手段と、
撮影されたマーカの画像上のエッジの位置情報を算出するエッジ検出手段と、
撮影された前記既知マーカの絶対座標情報と前記エッジの位置情報を用いて前記移動体の位置姿勢を算出する位置姿勢算出手段と、
前記既知マーカと同時に前記未知マーカを撮影することで、前記既知マーカを用いて算出した移動体の位置姿勢と、前記未知マーカのエッジの位置情報と、前記マーカ構造情報と、から未知マーカの絶対座標位置を算出するマーカ位置算出手段と、を有し、
前記エッジ構造情報を用いて前記画像取得手段の画素以上の精度にて前記既知マーカおよび前記未知マーカのエッジの位置情報を算出し、
前記マーカ位置算出手段において、絶対座標位置を算出した前記未知マーカを追加の既知マーカとして前記移動体の情報処理部に登録し、
前記移動体の移動により最初の既知マーカが画像取得手段により撮影されなくなった場合でも、登録により追加された既知マーカを用いて、前記位置姿勢算出手段において前記移動体の位置と姿勢を計測し、前記マーカ位置算出手段において前記未知マーカの絶対座標位置を算出することを特徴とする移動体。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の移動体であって、
前記画像取得手段によって同時に撮影された画像に複数の前記既知マーカが含まれる場合は、各々の既知マーカと移動体の現在位置を比較し、最も近い距離にある既知マーカを用いて移動体の絶対座標位置を算出することを特徴とする移動体。
【請求項3】
請求項1に記載の移動体であって、
複数の前記画像取得手段は、移動体が移動している場合は取得時刻が所定の時間差以内の複数の画像を同時に撮影された画像として扱い、移動体が停止している場合は取得時刻差に関係なく停止後に取得された複数の画像を同時に撮影された画像として扱い、移動状況に応じて使用する画像を選択することを特徴とする移動体。
【請求項4】
請求項1に記載の移動体であって、
前記既知マーカは、移動体の動作開始時には、移動体の作業を行う絶対座標系と移動体中心の座標系との関係を算出するための初期位置設定用に一つ以上設置されることを特徴とする移動体。
【請求項5】
請求項1に記載の移動体であって、
前記エッジの構造情報は、エッジ境界付近の濃淡分布もしくはその微分値の分布であることを特徴とする移動体。
【請求項6】
請求項1に記載の移動体であって、
前記未知マーカは、複数の直線からなる輪郭を有し、幾何学構造からなる前記マーカ構造情報は、少なくとも、その直線間の角度、もしくは直線間の距離を表す式であることを特徴とする移動体。
【請求項7】
請求項1に記載の移動体であって、
前記未知マーカは、移動体の移動経路において、1つ以上の前記既知マーカと同時に撮像できる状況が維持できる位置に配置されることを特徴とする移動体。
【請求項8】
画像情報を取得する撮像装置と、撮影された画像内のマーカを検出して移動体の絶対座標位置を検出する制御部を有する移動体において、
前記制御部は、
a)移動開始前に移動対象エリアに設置されたエッジ構造情報と絶対座標情報が既知の既知マーカの情報を取得し、
b)前記撮像装置によって前記既知マーカおよび/又は、マーカ構造情報およびエッジ構造情報は既知だが絶対座標情報が未知の未知マーカの画像を取得し、取得された前記画像から前記既知マーカおよび/又は未知マーカのエッジ位置を算出し、
c)取得された画像から既知マーカを検出して、前記既知マーカの前記絶対座標情報と前記エッジ位置により前記移動体の絶対座標位置を算出し、
d)前記マーカ構造情報と前記エッジ位置から、前記移動体の絶対座標位置に対する前記未知マーカの相対位置を算出することによって前記未知マーカの絶対座標位置を決定し、
e)前記決定された前記未知マーカを既知マーカとして前記制御部に新たに登録し、
f)前記制御部に登録された前記既知マーカを用いて前記b)~e)のステップの処理を繰り返しながら前記移動体の移動制御を行うことを特徴とする移動体における位置検出方法。
【請求項9】
請求項8に記載の位置検出方法であって、
前記ステップd)において、前記制御部は、前記既知マーカおよび前記未知マーカを移動体の前記撮像装置で一度に撮像することで、前記既知マーカを用いて算出された前記移動体の位置姿勢と、前記未知マーカの画像上のエッジ位置情報およびマーカ構造情報から未知マーカの絶対座標位置を算出することを特徴とする移動体における位置検出方法。
【請求項10】
請求項8に記載の位置検出方法であって、
前記ステップc)において、前記撮像装置によって複数の前記既知マーカが撮像された場合は、各々の既知マーカと前記移動体との距離を比較し、最も近い既知マーカを用いて前記移動体の絶対座標位置を算出することを特徴とする移動体における位置検出方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットや自動搬送車などの移動体に関し、特に移動位置を高精度に推定する検出技術に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
ロボット及び自動搬送車などの移動体は、製造現場や倉庫、ビルや空港等の公共設備、レジャー施設、地域配送、建設現場等、様々な環境での活用が進んでいる。このような移動体には、自律で目的地まで移動する技術、すなわち、自律走行制御技術(自律移動技術)が搭載されている。自律走行制御技術は、自己位置推定技術と動作/走行計画技術に大別され、移動体自身および周囲の情報を収集(センシング)し、移動体の自己位置及び走行状態を推定しながら、状況変化に対応した動作/走行を計画して走行機構を制御する技術である。この中で、自己位置推定技術は、走行環境の特性や利用可能なセンサ、運用条件、要求精度、コスト等の制約に応じ、様々な手法がある。例えば、走行環境では、屋外で言えば、車道、歩道、未整備空間、建物の傍、上空が開けている等の環境特性で手法は異なり、屋内でも、空間が広い空港、工場、倉庫、ビル・ホテル内通路、一般家庭の部屋の中等の環境特性によって利用する手法は異なる。
【0003】
使用するセンサは、静止画もしくは動画を撮影するカメラなどの撮像装置(単眼、ステレオ等)、発光装置と撮像装置を組み合わせた距離画像装置、レーザによる距離センサ(トータルステーション等の1点を正確に計測する測量器、周囲環境の点群を取得するレーザレンジセンサ等)、ミリ波レーダ、超音波、電波の送受信時刻をセンシングする全地球型位置計測装置(GPS/GNSS)、移動体の加速度を用いて位置姿勢を算出する慣性センサ(IMU)、車輪の回転量を計測するエンコーダが用いられ、前記環境特性やコスト、精度等に応じて選定する。例えば、上空が開けている車道等ではGPSを用いることができるが、建物の傍や屋内ではGPSは利用できない。
【0004】
また運用条件により、前記測量器等により事前に正確な地図が得られる場合は、その地図と移動体が得るリアルタイムのセンシング情報との照合による位置推定であるマップマッチング手法を用いることが可能であるが、建設現場等の環境が変わり易く、初めての場所で直ぐに運用しなければならない場合は利用できない。この様にGPSおよび地図が利用できない場合は、位置を推定しながら走行環境の地図を作成するSLAM手法が用いられる。SLAM(Simultaneous Localization and Mapping)では、距離センサあるいはカメラなどで周囲の情報を収集し、位置推定の際の基準となる形状や画像の特徴点を検出し、移動しながら特徴点の位置を追跡することで位置を推定する(オドメトリ)。そのため、SLAMで推定した位置および作成した地図は、誤差が蓄積し、長距離あるいは広い空間になるほど、真の絶対座標位置とのずれが大きくなる。
【0005】
そこで、複数センサから得られる位置情報を融合する手法や、同じ場所を再度通り、過去に作成した地図とのマップマッチング(ループクロージング)を行う手法等を用いて位置修正を行う必要があるが、位置精度に限界があり、例えば建設現場等において、ミリメートルオーダで設備の設置位置を位置合わせする用途には利用が難しい。
【0006】
一方、高い精度で位置合わせを行う技術として、移動体ではないが、例えば、特許文献1の様に、マーカが撮像された検出位置と基準マーカの基準位置の差に基づいた検出対象位置補正とカメラの姿勢調整を実施する方法が開示されている。また、特許文献2では、移動体において、移動体からマーカの相対位置を推定する方法が開示されている。特許文献2では、撮像装置の画素以上の精度(サブピクセル精度)で検出した撮像画像上でマーカの頂点位置を、距離センサから得られたマーカ面に投影することで、マーカの位置と姿勢を推定している。
【先行技術文献】
【特許文献】
【0007】
特開2018-161726号公報
特開2015-56057号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
前記のようにビルの建設現場等において、ミリメートルオーダで設備の設置位置を位置合わせする必要がある移動体では、
(a)天井があるケースがありGPSが利用できない、
(b)施工中なので環境が変わり易く、初めての場所で直ぐに運用しなければならないため、事前に作成された位置推定用の高精度地図が利用できない、
(c)柱や資材などが設置されている100m四方の広い範囲を移動し、かつミリメートルオーダで絶対位置推定を行う必要がある、
(d)高額な手法は採用できない、といった制約がある。
【0009】
レーザを用いた測量器を用いると、位置の精度は得られるが、高額になる上、柱などによりレーザが遮られる領域での作業ができない、位置は計測できるが方向は分からないため施工の線情報が得られない、といった課題が生じる。また前記SLAMを用いると、センサ分解能の限界、特徴点の位置誤差、マッチングおよび特徴点の追跡位置誤差により、誤差が蓄積し、精度に課題が生じる。そのため、本発明では、部品との位置合わせに用いられているマーカを用いた方法を移動体の位置推定に応用発展させるようにした。マーカを用いると、エッジ構造が既知であるため、撮像装置の画素以上の精度(サブピクセル)で画像上のマーカ位置が推定できる。
【0010】
先行技術である特許文献1で開示されている方法は、マーカを近接距離かつほぼ真上から撮影するものであり、移動体の位置姿勢を推定(自己位置推定)するためには、事前に床面の既知の位置に多数のマーカを設置する必要があり、前記本発明の制約(b)と(c)を解決できない。また特許文献2で開示されている方法は、撮像装置以外に距離センサも必要であるため、距離センサの精度とコストが課題(本発明の制約(c)と(d))であり、特に、距離センサを用いて数十m離れたマーカ面を推定する場合に本発明の制約(c)(ミリメートルオーダで絶対位置精度)が解決できない。また、開示されている方法では、マーカの頂点を特徴点として利用する必要があるため、高いサブピクセル精度が得られないという課題がある。さらに、この方法を用いて移動体の自己位置を高精度に推定するためには、移動体との距離が、例えば2メートルの位置に、略矩形状かつ絶対位置が既知のマーカを常に撮像できるように、事前に既知の位置に多数のマーカを設置する必要があり、前記本発明の制約(b)と(c)を解決できない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
2か月前
アズビル株式会社
制御装置
1か月前
和研工業株式会社
多連レバー機構
8日前
コフロック株式会社
流量制御装置
1か月前
スター精密株式会社
工作機械
24日前
株式会社丸和製作所
入力機器
1か月前
株式会社豊田自動織機
荷役車両
1か月前
株式会社フジキン
流量制御装置
1か月前
ローム株式会社
半導体集積回路
3日前
株式会社ダイフク
搬送設備
2か月前
株式会社村田製作所
温度補償回路
2か月前
株式会社シンテックホズミ
搬送ロボット
1か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
2か月前
国立大学法人広島大学
モデル誤差抑制補償器
29日前
愛知機械テクノシステム株式会社
無人搬送車
17日前
株式会社ダイフク
物品搬送設備
1か月前
アズビル株式会社
制御システムおよび制御方法
9日前
アズビル株式会社
制御システムおよび制御方法
9日前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
アズビル株式会社
制御システムおよび制御方法
18日前
日本精工株式会社
制御装置および制御方法
15日前
トヨタ自動車株式会社
自律走行装置
29日前
チームラボ株式会社
走行システム及び走行路
22日前
トヨタ自動車株式会社
群制御システム及び群制御方法
17日前
村田機械株式会社
稼働監視システム及び稼働監視方法
18日前
ローム株式会社
半導体装置
29日前
日本精工株式会社
制御システムおよび制御方法
29日前
ミツミ電機株式会社
電源回路及びその起動方法
29日前
ミツミ電機株式会社
多方向入力装置
1日前
ミツミ電機株式会社
多方向入力装置
15日前
ミツミ電機株式会社
多方向入力装置
1日前
ミツミ電機株式会社
多方向入力装置
1日前
ブラザー工業株式会社
調整方法及び数値制御装置
1か月前
ミツミ電機株式会社
多方向入力装置
15日前
ミツミ電機株式会社
多方向入力装置
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ