TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025037108
公報種別
公開特許公報(A)
公開日
2025-03-17
出願番号
2023143870
出願日
2023-09-05
発明の名称
移動体制御システム及び情報処理方法
出願人
三菱重工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/43 20240101AFI20250310BHJP(制御;調整)
要約
【課題】移動経路の干渉の発生頻度を抑制する。
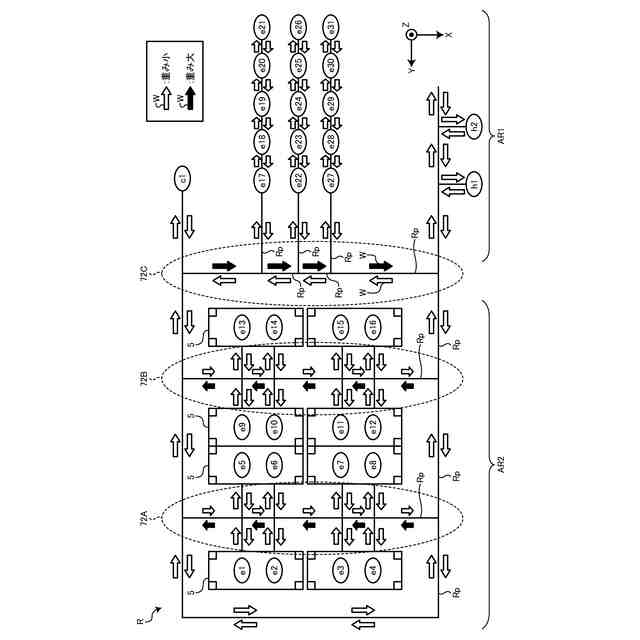
【解決手段】移動体制御システムは、移動体が通行する複数の経路部分と、経路部分の移動コストを示す重み値とを対応付けて記憶する記憶部と、複数の経路部分の少なくとも一部について、経路部分の通過方向毎に別々に重み値を設定する重み設定部と、複数の経路部分の通過方向毎の重み値に基づいて、移動体の移動開始位置から目的地までの移動経路を設定する経路設定部と、を備える。
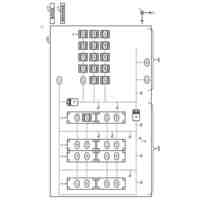
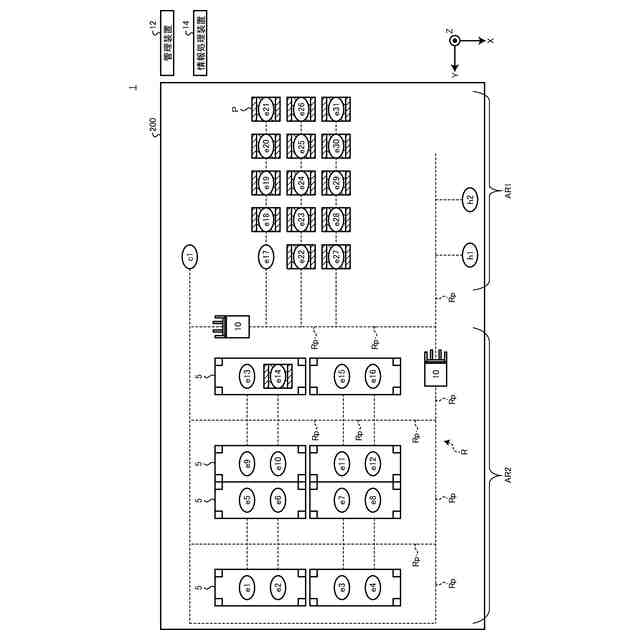
【選択図】図1
特許請求の範囲
【請求項1】
移動体が通行する複数の経路部分と、経路部分の移動コストを示す重み値とを対応付けて記憶する記憶部と、
前記複数の経路部分の少なくとも一部について、前記経路部分の通過方向毎に別々に前記重み値を設定する重み設定部と、
前記複数の経路部分の通過方向毎の前記重み値に基づいて、前記移動体の移動開始位置から目的地までの移動経路を設定する経路設定部と、を備える、
移動体制御システム。
続きを表示(約 960 文字)
【請求項2】
前記重み設定部は、連続する一連の前記経路部分に対して、一方方向には通過しやすく、前記一方方向とは反対の他方方向には通過しにくくなるよう前記重み値を設定する、
請求項1に記載の移動体制御システム。
【請求項3】
移動体が通行する複数の経路部分と、経路部分の移動コストを示す重み値とを対応付けて記憶する記憶部と、
前記複数の経路部分の前記重み値に基づいて、前記移動体の移動開始位置から目的地までの移動経路を設定する経路設定部と、
過去に設定された前記移動経路に基づいて、前記経路部分の前記重み値を設定する重み設定部と、を備える、
移動体制御システム。
【請求項4】
前記重み設定部は、通過回数が多い前記経路部分ほど通過しにくくなるよう前記重み値を設定する、
請求項3に記載の移動体制御システム。
【請求項5】
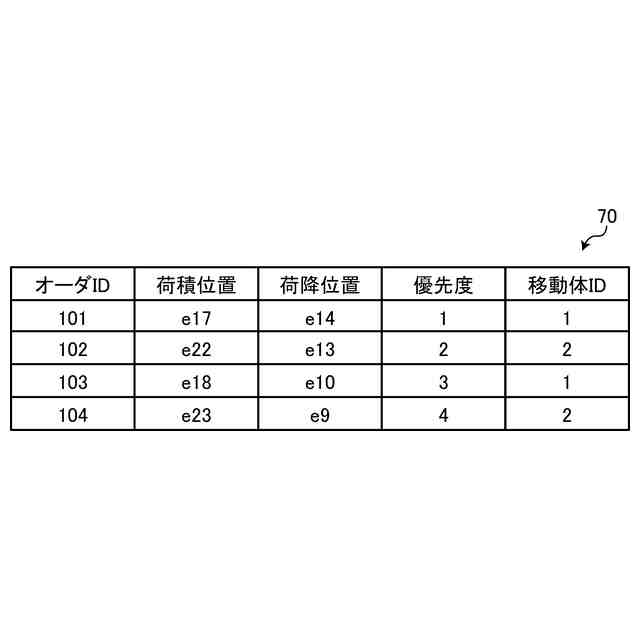
前記記憶部は、前記移動体の荷積位置および荷降位置と、優先度とを規定した一群の作業オーダからなるオーダ情報を記憶し、
前記経路設定部は、前記オーダ情報において、前記優先度が高い順に、前記移動経路を優先的に設定し、
前記重み設定部は、前記オーダ情報において、設定済みの前記移動経路で通過する前記経路部分が通過しにくくなるよう前記重み値を設定する、
請求項3に記載の移動体制御システム。
【請求項6】
移動体が通行する複数の経路部分の少なくとも一部について、前記経路部分の通過方向毎に別々に設定された重み値を、取得するステップと、
前記複数の経路部分の通過方向毎の前記重み値に基づいて、前記移動体の移動開始位置から目的地までの移動経路を設定するステップと、を備える、
情報処理方法。
【請求項7】
移動体が通行する複数の経路部分と、経路部分の移動コストを示す重み値とを取得するステップと、
前記複数の経路部分の前記重み値に基づいて、前記移動体の移動開始位置から目的地までの移動経路を設定するステップと、
過去に設定された前記移動経路に基づいて、前記経路部分の前記重み値を設定するステップと、を備える、
情報処理方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体制御システム及び情報処理方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
移動体の移動経路を設定し、移動経路に沿って移動体を移動させる制御が知られている。例えば特許文献1には、最短経路探索によって搬送車(移動体)の移動経路を生成し、移動経路に沿って搬送車を移動させる技術が開示されている。そして、特許文献1では、搬送車同士が干渉するおそれが生じたときに、優先度合いの高い搬送車の移動を優先させ、優先度合いの低い搬送車を待機させる干渉回避処理を行うことが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2016-170580号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のように、移動経路として目的地までの最短経路を常に採用すると、重複する経路で双方向の移動が生じ、干渉の発生頻度が高くなる。干渉が発生すると、移動体が干渉地点の手前で待機したり経路外へ一時退避する必要が生じるので、移動体による作業の処理効率が低下する場合がある。なお、本明細書では、干渉とは、異なる移動体の移動経路の一部が交差または重なり、衝突等の可能性が発生することを意味する。
【0005】
本開示は、上記に鑑みてなされたものであり、移動経路の干渉の発生頻度を抑制可能な移動体制御システム及び情報処理方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る移動体制御システムは、移動体が通行する複数の経路部分と、経路部分の移動コストを示す重み値とを対応付けて記憶する記憶部と、前記複数の経路部分の少なくとも一部について、前記経路部分の通過方向毎に別々に前記重み値を設定する重み設定部と、前記複数の経路部分の通過方向毎の前記重み値に基づいて、前記移動体の移動開始位置から目的地までの移動経路を設定する経路設定部と、を備える。
【0007】
本開示に係る移動体制御システムは、移動体が通行する複数の経路部分と、経路部分の移動コストを示す重み値とを対応付けて記憶する記憶部と、前記複数の経路部分の前記重み値に基づいて、前記移動体の移動開始位置から目的地までの移動経路を設定する経路設定部と、過去に設定された前記移動経路に基づいて、前記経路部分の前記重み値を設定する重み設定部と、を備える。
【0008】
本開示に係る情報処理方法は、移動体が通行する複数の経路部分の少なくとも一部について、前記経路部分の通過方向毎に別々に設定された重み値を、取得するステップと、前記複数の経路部分の通過方向毎の前記重み値に基づいて、前記移動体の移動開始位置から目的地までの移動経路を設定するステップと、を備える。
【0009】
本開示に係る情報処理方法は、移動体が通行する複数の経路部分と、経路部分の移動コストを示す重み値とを取得するステップと、前記複数の経路部分の前記重み値に基づいて、前記移動体の移動開始位置から目的地までの移動経路を設定するステップと、過去に設定された前記移動経路に基づいて、前記経路部分の前記重み値を設定するステップと、を備える。
【発明の効果】
【0010】
本開示によれば、移動経路の干渉の発生頻度を抑制できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱重工業株式会社
炉設備
3日前
三菱重工業株式会社
摺動システム
4日前
三菱重工業株式会社
部材の延命方法
3日前
三菱重工業株式会社
船舶、船舶の運航方法
3日前
三菱重工業株式会社
加工器具及び加工方法
4日前
三菱重工業株式会社
熱移送デバイス、及び回路基板
4日前
三菱重工業株式会社
移動体制御システム及び情報処理方法
今日
三菱重工業株式会社
移動体制御システム及び情報処理方法
今日
三菱重工業株式会社
水素吸蔵材料、水素放出・貯蔵システム
4日前
三菱重工業株式会社
三次元造形方法、および、三次元造形装置
4日前
三菱重工業株式会社
ガスタービン制御装置、及び、ガスタービン制御方法
今日
三菱重工業株式会社
炉設備
3日前
三菱重工業株式会社
予兆検知装置、予兆検知方法、及び、予兆検知プログラム
4日前
三菱重工業株式会社
ガスタービンプラント
3日前
三菱重工業株式会社
ガスタービン制御装置、ガスタービン制御入力決定方法及びガスタービン制御入力決定プログラム
4日前
三菱重工業株式会社
投下情報管理装置、経済性シミュレータ、飛行システム、投下情報管理方法、及び投下情報管理プログラム
4日前
個人
無人作業システム
1か月前
村田機械株式会社
産業機械
1か月前
アズビル株式会社
制御装置
1か月前
コフロック株式会社
流量制御装置
1か月前
トヨタ自動車株式会社
自律移動体
1か月前
株式会社クボタ
作業車
1か月前
株式会社丸和製作所
入力機器
1か月前
スター精密株式会社
工作機械
5日前
株式会社豊田自動織機
荷役車両
1か月前
株式会社明電舎
車両
1か月前
株式会社フジキン
流量制御装置
1か月前
アズビル株式会社
パラメータ調整装置
2か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社村田製作所
温度補償回路
1か月前
株式会社シンテックホズミ
搬送ロボット
20日前
トヨタ自動車株式会社
ロボットシステム
2か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
国立大学法人広島大学
モデル誤差抑制補償器
10日前
株式会社ダイフク
物品搬送設備
24日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ