TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025040771
公報種別
公開特許公報(A)
公開日
2025-03-25
出願番号
2023147785
出願日
2023-09-12
発明の名称
制御装置、ゲイン自動調整方法、記憶媒体
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
G05B
13/02 20060101AFI20250317BHJP(制御;調整)
要約
【課題】流体アクチュエータを制御するための複数の制御ゲインを効率的に自動調整できる制御装置等を提供する。
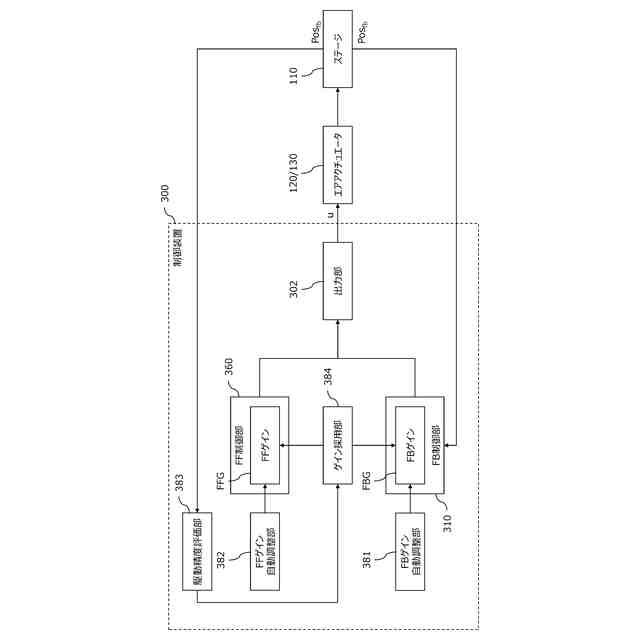
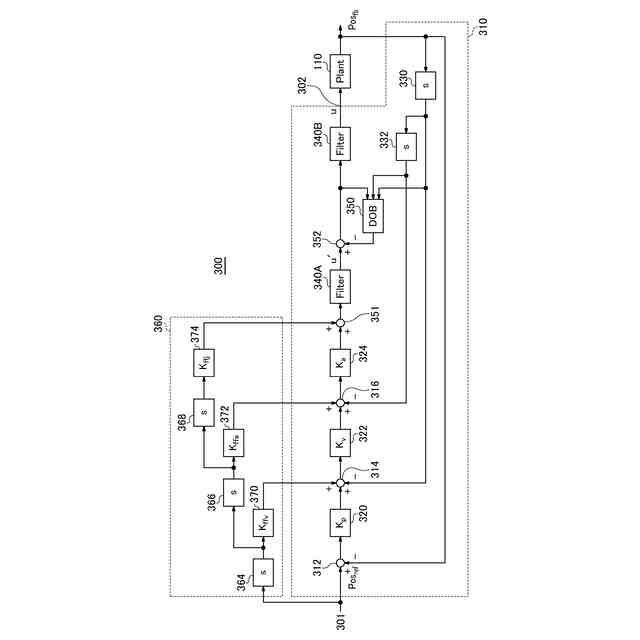
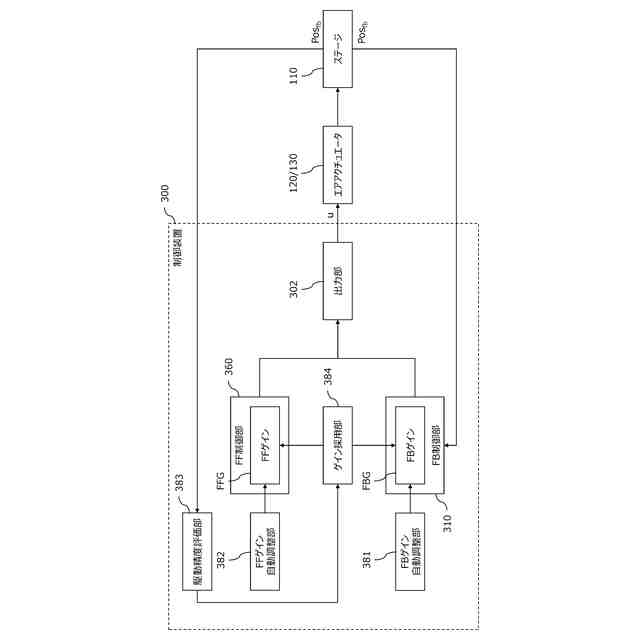
【解決手段】エアアクチュエータ120、130を制御する制御装置300は、複数のフィードフォワードゲインFFGを備えるフィードフォワード制御部360と、複数のフィードバックゲインFBGを備えるフィードバック制御部310と、フィードフォワード制御部360およびフィードバック制御部310の出力に基づいて、エアアクチュエータ120、130に対する操作量uを出力する出力部302と、複数のフィードバックゲインFBGを自動で調整するフィードバックゲイン自動調整部381と、複数のフィードフォワードゲインFFGを自動で調整するフィードフォワードゲイン自動調整部382と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
作動流体によって被駆動物を駆動する流体アクチュエータを制御する制御装置であって、
複数のフィードフォワードゲインを備えるフィードフォワード制御部と、
複数のフィードバックゲインを備えるフィードバック制御部と、
前記フィードフォワード制御部および前記フィードバック制御部の出力に基づいて、前記流体アクチュエータに対する操作量を出力する出力部と、
複数の前記フィードバックゲインを自動で調整するフィードバックゲイン自動調整部と、
複数の前記フィードフォワードゲインを自動で調整するフィードフォワードゲイン自動調整部と、
自動調整後の複数の前記フィードバックゲインおよび複数の前記フィードフォワードゲインに基づいて前記流体アクチュエータを制御し、前記被駆動物の駆動精度を評価する駆動精度評価部と、
前記駆動精度が目標精度より高い場合、前記自動調整後の複数の前記フィードバックゲインおよび複数の前記フィードフォワードゲインを採用するゲイン採用部と、
を備える制御装置。
続きを表示(約 1,900 文字)
【請求項2】
前記フィードバックゲイン自動調整部は、少なくとも三つの前記フィードバックゲインのうち二つの前記フィードバックゲインを自動で調整する、請求項1に記載の制御装置。
【請求項3】
前記複数のフィードフォワードゲインは、前記流体アクチュエータの制御量の目標値の一階微分に対して乗算される第1フィードフォワードゲインと、前記目標値の二階微分に対して乗算される第2フィードフォワードゲインと、前記目標値の三階微分に対して乗算される第3フィードフォワードゲインを含み、
前記複数のフィードバックゲインは、前記流体アクチュエータの前記制御量の測定値および前記目標値の偏差に対して乗算される第1フィードバックゲインと、前記測定値の一階微分に基づく前記偏差に対して乗算される第2フィードバックゲインと、前記測定値の二階微分に基づく前記偏差に対して乗算される第3フィードバックゲインを含む、
請求項1または2に記載の制御装置。
【請求項4】
前記駆動精度が前記目標精度より低い場合、前記フィードバックゲイン自動調整部は、複数の前記フィードバックゲインを前回以前と異なる値の組に自動で調整する、または、前回以前と異なる組の複数の前記フィードバックゲインを自動で調整する、請求項1または2に記載の制御装置。
【請求項5】
前記駆動精度評価部は、自動調整後の複数の前記フィードバックゲインおよび自動調整前の複数の前記フィードフォワードゲインに基づいて前記流体アクチュエータを制御し、前記被駆動物の駆動精度を評価し、
前記ゲイン採用部は、前記駆動精度が前記目標精度より高い場合、前記自動調整後の複数の前記フィードバックゲインおよび前記自動調整前の複数の前記フィードフォワードゲインを採用し、
前記フィードフォワードゲイン自動調整部は、採用された前記自動調整後の複数の前記フィードバックゲインに対して、前記フィードフォワードゲインを調整しない、
請求項1または2に記載の制御装置。
【請求項6】
前記制御量は、前記被駆動物の位置である、請求項3に記載の制御装置。
【請求項7】
前記流体アクチュエータは、被処理物が載置される前記被駆動物としてのステージを駆動する、請求項1または2に記載の制御装置。
【請求項8】
作動流体によって被駆動物を駆動する流体アクチュエータを制御する制御装置であって、複数のフィードフォワードゲインを備えるフィードフォワード制御部と、複数のフィードバックゲインを備えるフィードバック制御部と、前記フィードフォワード制御部および前記フィードバック制御部の出力に基づいて、前記流体アクチュエータに対する操作量を出力する出力部と、を備える制御装置におけるゲイン自動調整方法であって、
複数の前記フィードバックゲインを自動で調整することと、
複数の前記フィードフォワードゲインを自動で調整することと、
自動調整後の複数の前記フィードバックゲインおよび複数の前記フィードフォワードゲインに基づいて前記流体アクチュエータを制御し、前記被駆動物の駆動精度を評価することと、
前記駆動精度が目標精度より高い場合、前記自動調整後の複数の前記フィードバックゲインおよび複数の前記フィードフォワードゲインを採用することと、
を実行するゲイン自動調整方法。
【請求項9】
作動流体によって被駆動物を駆動する流体アクチュエータを制御する制御装置であって、複数のフィードフォワードゲインを備えるフィードフォワード制御部と、複数のフィードバックゲインを備えるフィードバック制御部と、前記フィードフォワード制御部および前記フィードバック制御部の出力に基づいて、前記流体アクチュエータに対する操作量を出力する出力部と、を備える制御装置におけるゲイン自動調整プログラムであって、
複数の前記フィードバックゲインを自動で調整することと、
複数の前記フィードフォワードゲインを自動で調整することと、
自動調整後の複数の前記フィードバックゲインおよび複数の前記フィードフォワードゲインに基づいて前記流体アクチュエータを制御し、前記被駆動物の駆動精度を評価することと、
前記駆動精度が目標精度より高い場合、前記自動調整後の複数の前記フィードバックゲインおよび複数の前記フィードフォワードゲインを採用することと、
をコンピュータに実行させるゲイン自動調整プログラムを記憶している記憶媒体。
発明の詳細な説明
【技術分野】
【0001】
本開示は流体アクチュエータの制御装置等に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
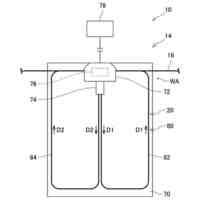
特許文献1には、半導体の製造に使用される露光装置等において、モータによってステージを駆動するステージ装置が開示されている。このステージ装置は、被駆動物としてのステージの目標位置と測定位置の偏差に基づくPID制御(駆動制御)を担う補償演算器を備える。補償演算器における各制御ゲインは、モデル同定器によって同定されるステージの特性に基づいて、自動的に演算される。
【0003】
ステージ装置としては、特許文献2に開示されるように、空気等の作動流体によってステージを駆動する流体アクチュエータを備えるものも知られている。特許文献2の図3に示されるように、この流体アクチュエータの制御装置は、特許文献1における補償演算器より複雑である。これは、特許文献2の段落0032に記載されているように、流体アクチュエータでは配管共振その他の機械共振が無視できないことが多く、その制御モデルの次数が高く(例えば、3次以上)になるためである。このような高次のシステムを制御するために、特許文献2における制御装置には、三つのフィードフォワードゲインを備えるフィードフォワード制御部と、三つのフィードバックゲインを備えるフィードバック制御部が設けられる。
【先行技術文献】
【特許文献】
【0004】
特開2011-227768号公報
特開2022-124575号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
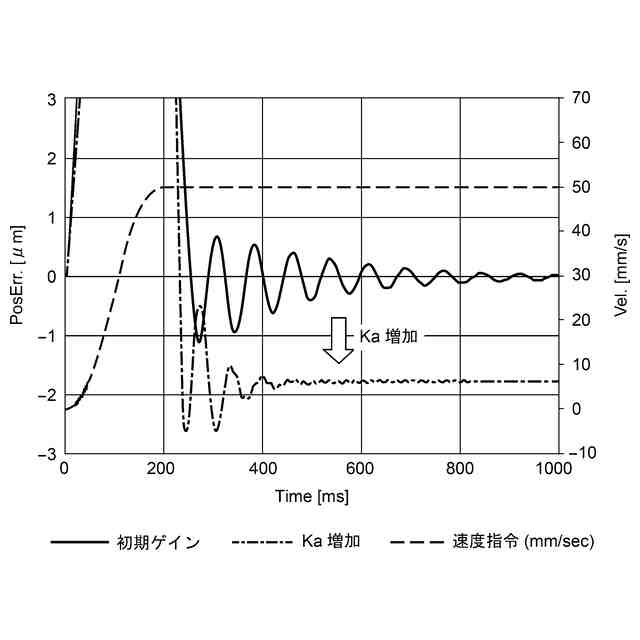
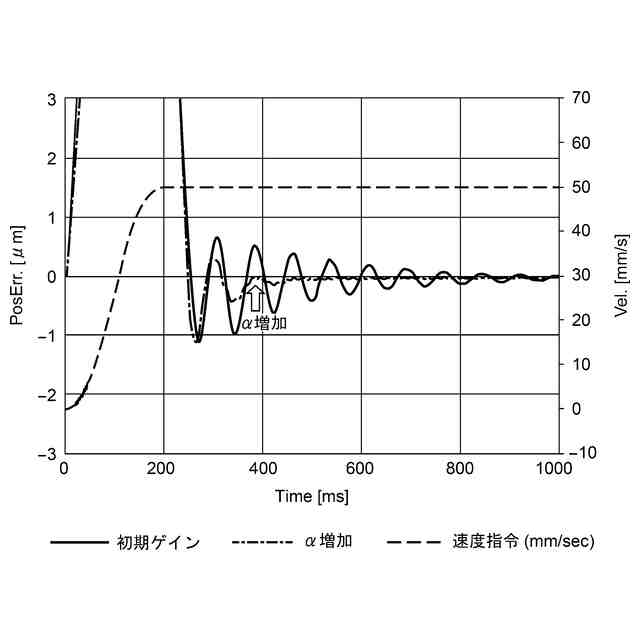
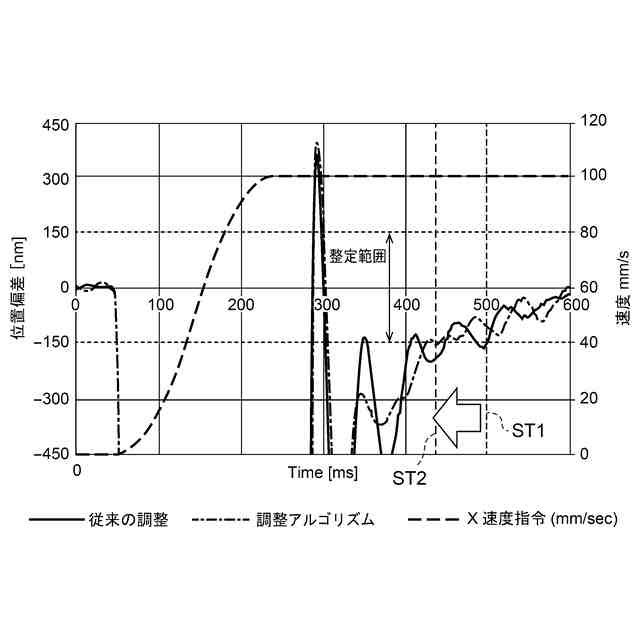
特許文献2における制御装置には、三つのフィードフォワードゲインおよび三つのフィードバックゲインの合わせて六つの制御ゲインが存在する。ここに特許文献1に開示されている制御ゲインの自動調整技術を適用したとしても、制御モデルが複雑すぎるために各制御ゲインを適切に調整できない恐れがある(具体例については後述する)。また、各制御ゲインの自動調整のために、多大な時間やコストがかかる恐れがある。
【0006】
本開示はこうした状況に鑑みてなされたものであり、流体アクチュエータを制御するための複数の制御ゲインを効率的に自動調整できる制御装置等を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本開示のある態様の制御装置は、作動流体によって被駆動物を駆動する流体アクチュエータを制御する制御装置であって、複数のフィードフォワードゲインを備えるフィードフォワード制御部と、複数のフィードバックゲインを備えるフィードバック制御部と、フィードフォワード制御部およびフィードバック制御部の出力に基づいて、流体アクチュエータに対する操作量を出力する出力部と、複数のフィードバックゲインを自動で調整するフィードバックゲイン自動調整部と、複数のフィードフォワードゲインを自動で調整するフィードフォワードゲイン自動調整部と、自動調整後の複数のフィードバックゲインおよび複数のフィードフォワードゲインに基づいて流体アクチュエータを制御し、被駆動物の駆動精度を評価する駆動精度評価部と、駆動精度が目標精度より高い場合、自動調整後の複数のフィードバックゲインおよび複数のフィードフォワードゲインを採用するゲイン採用部と、を備える。
【0008】
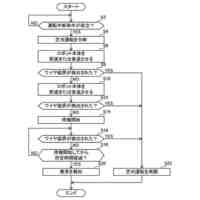
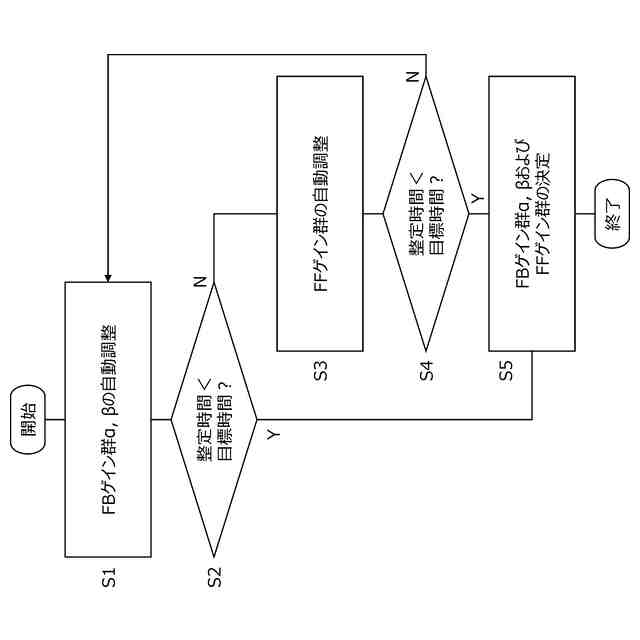
本態様によれば、複数のフィードバックゲインを一括で自動調整する第1ステップと、複数のフィードフォワードゲインを一括で自動調整する第2ステップを、別ステップとして実行することで、複数のフィードフォワードゲインおよび複数のフィードバックゲインを効率的に自動調整できる(具体例については後述する)。
【0009】
本開示の別の態様は、ゲイン自動調整方法である。この方法は、作動流体によって被駆動物を駆動する流体アクチュエータを制御する制御装置であって、複数のフィードフォワードゲインを備えるフィードフォワード制御部と、複数のフィードバックゲインを備えるフィードバック制御部と、フィードフォワード制御部およびフィードバック制御部の出力に基づいて、流体アクチュエータに対する操作量を出力する出力部と、を備える制御装置におけるゲイン自動調整方法であって、複数のフィードバックゲインを自動で調整することと、複数のフィードフォワードゲインを自動で調整することと、自動調整後の複数のフィードバックゲインおよび複数のフィードフォワードゲインに基づいて流体アクチュエータを制御し、被駆動物の駆動精度を評価することと、駆動精度が目標精度より高い場合、自動調整後の複数のフィードバックゲインおよび複数のフィードフォワードゲインを採用することと、を実行する。
【0010】
本開示の更に別の態様は、記憶媒体である。この記憶媒体は、作動流体によって被駆動物を駆動する流体アクチュエータを制御する制御装置であって、複数のフィードフォワードゲインを備えるフィードフォワード制御部と、複数のフィードバックゲインを備えるフィードバック制御部と、フィードフォワード制御部およびフィードバック制御部の出力に基づいて、流体アクチュエータに対する操作量を出力する出力部と、を備える制御装置におけるゲイン自動調整プログラムであって、複数のフィードバックゲインを自動で調整することと、複数のフィードフォワードゲインを自動で調整することと、自動調整後の複数のフィードバックゲインおよび複数のフィードフォワードゲインに基づいて流体アクチュエータを制御し、被駆動物の駆動精度を評価することと、駆動精度が目標精度より高い場合、自動調整後の複数のフィードバックゲインおよび複数のフィードフォワードゲインを採用することと、をコンピュータに実行させるゲイン自動調整プログラムを記憶している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
和研工業株式会社
多連レバー機構
8日前
スター精密株式会社
工作機械
24日前
ローム株式会社
半導体集積回路
3日前
株式会社シンテックホズミ
搬送ロボット
1か月前
株式会社ダイフク
物品搬送設備
1か月前
国立大学法人広島大学
モデル誤差抑制補償器
29日前
愛知機械テクノシステム株式会社
無人搬送車
17日前
アズビル株式会社
制御システムおよび制御方法
18日前
アズビル株式会社
制御システムおよび制御方法
9日前
アズビル株式会社
制御システムおよび制御方法
9日前
日本精工株式会社
制御装置および制御方法
15日前
トヨタ自動車株式会社
自律走行装置
29日前
チームラボ株式会社
走行システム及び走行路
22日前
ミツミ電機株式会社
電源回路及びその起動方法
29日前
ローム株式会社
半導体装置
29日前
村田機械株式会社
稼働監視システム及び稼働監視方法
18日前
トヨタ自動車株式会社
群制御システム及び群制御方法
17日前
日本精工株式会社
制御システムおよび制御方法
29日前
ローム株式会社
定電圧生成回路
1か月前
ミツミ電機株式会社
多方向入力装置
15日前
ミツミ電機株式会社
多方向入力装置
15日前
ミツミ電機株式会社
多方向入力装置
1日前
ミツミ電機株式会社
多方向入力装置
1日前
ミツミ電機株式会社
多方向入力装置
1日前
ミツミ電機株式会社
多方向入力装置
15日前
ミツミ電機株式会社
多方向入力装置
1日前
ミツミ電機株式会社
多方向入力装置
15日前
ミツミ電機株式会社
多方向入力装置
1日前
ミツミ電機株式会社
多方向入力装置
15日前
株式会社マキタ
作業ロボット
23日前
HEROZ株式会社
異常検知アルゴリズムの評価システム
17日前
株式会社TMEIC
リモートI/Oステーション
9日前
ローム株式会社
レギュレータ回路
2日前
株式会社エイトノット
情報処理システム
1か月前
岩井ファルマテック株式会社
監査証跡の管理システム
4日前
株式会社マキタ
自律移動システム
23日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ