TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025028464
公報種別
公開特許公報(A)
公開日
2025-03-03
出願番号
2023133296
出願日
2023-08-18
発明の名称
情報処理システム
出願人
株式会社エイトノット
代理人
One ip弁理士法人
主分類
G05D
1/00 20240101AFI20250221BHJP(制御;調整)
要約
【課題】安全に、且つ、効率的に障害物を回避して航行するための情報処理システムを提供する。
【解決手段】本開示による情報処理システムは、障害物を回避して目的地まで航行するための情報処理を実行する制御部を備え、前記制御部は、水上又は水中の前記障害物の位置情報、及びサイズ情報を含む障害物情報に基づいて、自船が前記障害物を回避する際の前記障害物から離隔する距離に関するパラメータを決定するパラメータ決定処理を実行する。
【選択図】図1
特許請求の範囲
【請求項1】
障害物を回避して目的地まで航行するための情報処理を実行する制御部を備え、
前記制御部は、水上又は水中の前記障害物の位置情報、及びサイズ情報を含む障害物情報に基づいて、自船が前記障害物を回避する際の前記障害物から離隔する距離に関するパラメータを決定するパラメータ決定処理を実行する、情報処理システム。
続きを表示(約 580 文字)
【請求項2】
前記パラメータ決定処理は、さらに前記障害物の種類情報に基づいて、前記パラメータを決定する、請求項1に記載の情報処理システム。
【請求項3】
前記パラメータ決定処理は、さらに前記障害物の移動速度情報及び移動方向情報の少なくとも一方に基づいて、前記パラメータを決定する、請求項1又は2に記載の情報処理システム。
【請求項4】
前記障害物のサイズ情報は、水面から障害物の頂点までの高さの情報を含む、請求項1又は2に記載の情報処理システム。
【請求項5】
前記障害物の種類情報は、前記障害物が他船又は人であることを示す情報を含む、請求項1又は2に記載の情報処理システム。
【請求項6】
前記制御部は、前記パラメータに基づいて、前記障害物を回避して目的地まで航行するための航行経路情報を生成する航行経路生成処理を実行する、請求項1又は2に記載の情報処理システム。
【請求項7】
前記制御部は、
前記パラメータに基づく出力情報を生成する出力情報生成処理と、を実行する、請求項1又は2に記載の情報処理システム。
【請求項8】
前記出力情報は、表示部に表示させるための画像データ、または音声出力させる音声データを含む、請求項7に記載の情報処理システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、情報処理システムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、船舶が航行する際には、水面の浮遊物や他の船舶などの障害物を回避する必要があり、そのための技術が求められている。例えば、特許文献1には、複数のセンサによるセンサデータを統合して、移動経路上に存在する異物を検知し、船舶の衝突回避を支援するシステムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-036010号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、障害物を回避するために、障害物から必要以上に離れた経路を航行すると、遠回りになってしまい、時間や燃料の効率が悪化するという問題がある。
【0005】
そこで、本開示は上記問題点に鑑みてなされたものであり、その目的は、安全に、且つ、効率的に障害物を回避して航行するための情報処理システムを提供することである。
【課題を解決するための手段】
【0006】
本開示によれば、障害物を回避して目的地まで航行するための情報処理を実行する制御部を備え、
前記制御部は、水上又は水中の前記障害物の位置情報、及びサイズ情報を含む障害物情報に基づいて、自船が前記障害物を回避する際の前記障害物から離隔する距離に関するパラメータを決定するパラメータ決定処理を実行する、情報処理システムが提供される。
【発明の効果】
【0007】
本開示によれば、安全に、且つ、効率的に障害物を回避して航行するための情報処理システムを提供することができる。
【図面の簡単な説明】
【0008】
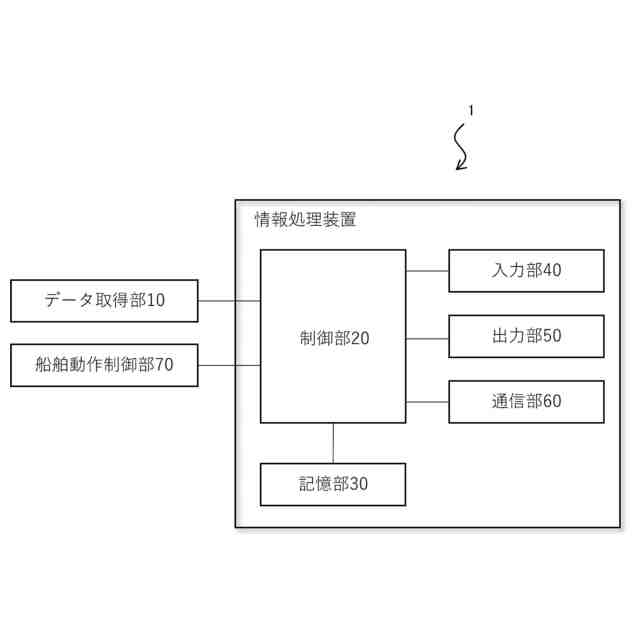
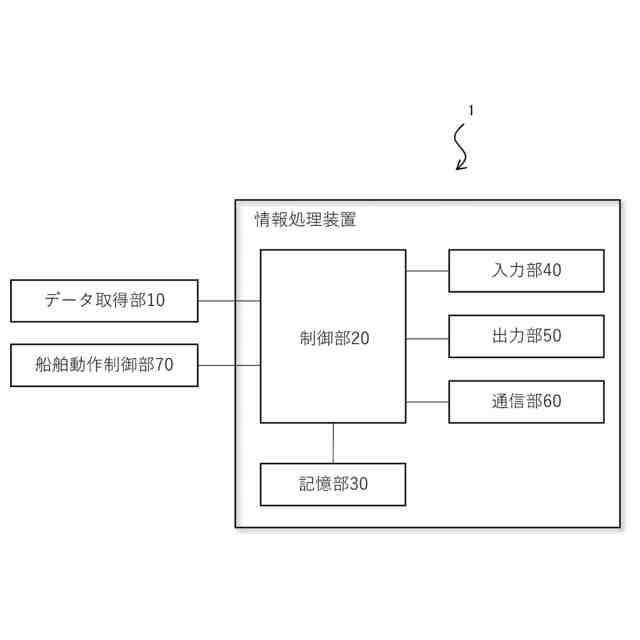
本開示の一実施形態に係る情報処理システムを示す図である。
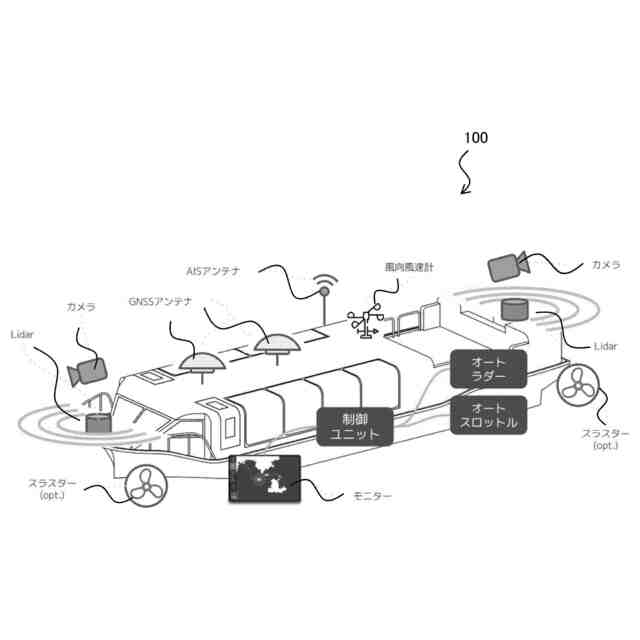
同実施形態に係る情報処理システムの一例を適用した船舶を示す図である。
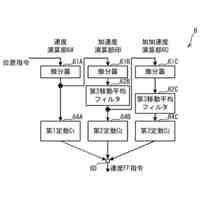
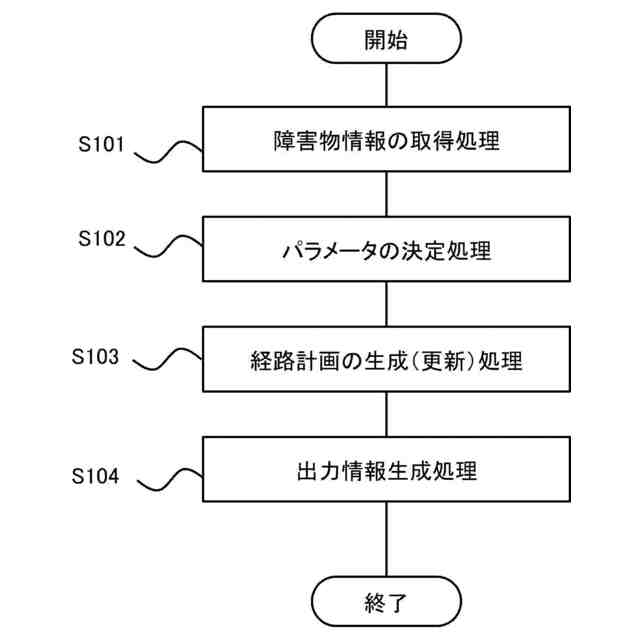
同実施形態に係る情報処理システムにおける一連の制御に係るフローチャート図である。
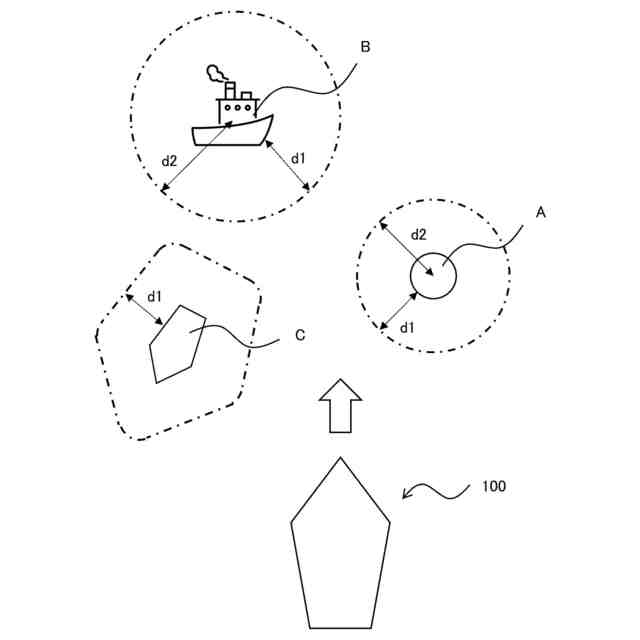
同実施形態に係る障害物の適正回避距離の一例を示す図である。
【発明を実施するための形態】
【0009】
以下に添付図面を参照しながら、本開示の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0010】
図1は、本実施形態にかかる情報処理システム(以下、単に「システム」とも称する。)の一例である。本実施形態のシステムは、任意の形式の船舶に設置することができ、特に、比較的小型の船舶に適している。本実施形態のシステムは、具体的には、漁船、水上タクシー、小型兼用船、遊漁船、客船、交通船、作業船、消防艇・警戒艇、プレジャーヨット、プレジャーモーターボート、特殊作業船舶、等に採用することができ、大型の客船、タンカー、貨物船等にも採用し得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
2か月前
アズビル株式会社
制御装置
1か月前
和研工業株式会社
多連レバー機構
7日前
コフロック株式会社
流量制御装置
1か月前
株式会社丸和製作所
入力機器
1か月前
スター精密株式会社
工作機械
23日前
ローム株式会社
半導体集積回路
2日前
株式会社豊田自動織機
荷役車両
1か月前
株式会社フジキン
流量制御装置
1か月前
株式会社シンテックホズミ
搬送ロボット
1か月前
株式会社村田製作所
温度補償回路
2か月前
愛知機械テクノシステム株式会社
無人搬送車
16日前
国立大学法人広島大学
モデル誤差抑制補償器
28日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
2か月前
アズビル株式会社
制御システムおよび制御方法
17日前
アズビル株式会社
制御システムおよび制御方法
8日前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
アズビル株式会社
制御システムおよび制御方法
8日前
日本精工株式会社
制御装置および制御方法
14日前
トヨタ自動車株式会社
自律走行装置
28日前
チームラボ株式会社
走行システム及び走行路
21日前
日本精工株式会社
制御システムおよび制御方法
28日前
トヨタ自動車株式会社
群制御システム及び群制御方法
16日前
ミツミ電機株式会社
電源回路及びその起動方法
28日前
村田機械株式会社
稼働監視システム及び稼働監視方法
17日前
ローム株式会社
半導体装置
28日前
ミツミ電機株式会社
多方向入力装置
14日前
ミツミ電機株式会社
多方向入力装置
14日前
ミツミ電機株式会社
多方向入力装置
14日前
ミツミ電機株式会社
多方向入力装置
14日前
ブラザー工業株式会社
調整方法及び数値制御装置
1か月前
ミツミ電機株式会社
多方向入力装置
14日前
ミツミ電機株式会社
多方向入力装置
今日
ミツミ電機株式会社
多方向入力装置
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ