TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024160744
公報種別
公開特許公報(A)
公開日
2024-11-15
出願番号
2023076029
出願日
2023-05-02
発明の名称
工作機械の操作システム
出願人
株式会社FUJI
代理人
個人
主分類
G05B
19/409 20060101AFI20241108BHJP(制御;調整)
要約
【課題】制御軸を間違うことなく手動操作できるようにした工作機械の操作システムを提供すること。
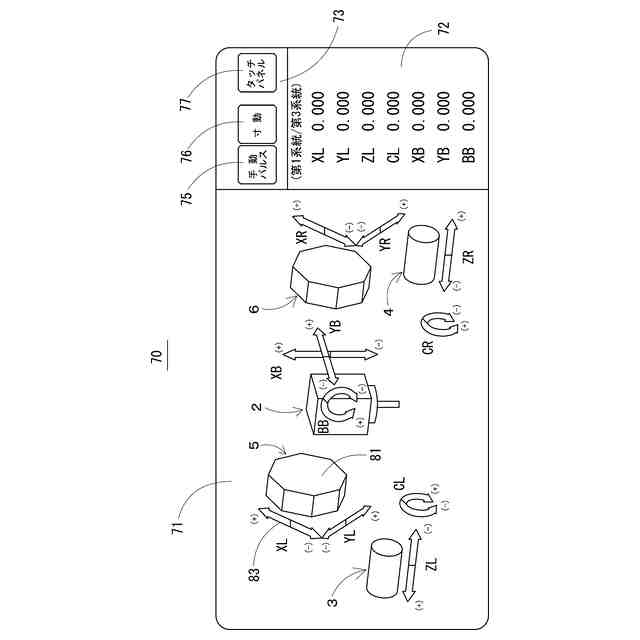
【解決手段】各々の駆動モータによって所定方向の移動や回転を出力する複数の加工装置と、前記駆動モータによる所定方向の移動や回転を制御軸として前記加工装置を駆動制御する制御装置と、所定の操作を行うための押しボタンやタッチパネル式のモニタを備えた操作表示装置と、を有する工作機械であって、前記工作機械が前記操作表示装置の操作によって前記加工装置の駆動モータを手動で操作可能にする手動操作モードに切り換えられた場合に、前記操作表示装置のモニタには前記加工装置の制御軸に対応した操作表示マークが示され、手動操作の対象として選択された前記制御軸の前記操作表示マークが特定表示となるものである工作機械の操作システム。
【選択図】図6
特許請求の範囲
【請求項1】
各々の駆動モータによって所定方向の移動や回転を出力する複数の加工装置と、前記駆動モータによる所定方向の移動や回転を制御軸として前記加工装置を駆動制御する制御装置と、所定の操作を行うための押しボタンやタッチパネル式のモニタを備えた操作表示装置と、を有する工作機械であって、
前記工作機械が前記操作表示装置の操作によって前記加工装置の駆動モータを手動で操作可能にする手動操作モードに切り換えられた場合に、前記操作表示装置のモニタには前記加工装置の制御軸に対応した操作表示マークが示され、手動操作の対象として選択された前記制御軸の前記操作表示マークが特定表示となる工作機械の操作システム。
続きを表示(約 920 文字)
【請求項2】
手動操作モードの前記工作機械に対し、選択された前記加工装置の駆動モータの手動操作が行われた場合は、前記操作表示装置のモニタに示された該当する前記操作表示マークが前記特定表示から動作表示に切り換わる請求項1に記載する工作機械の操作システム。
【請求項3】
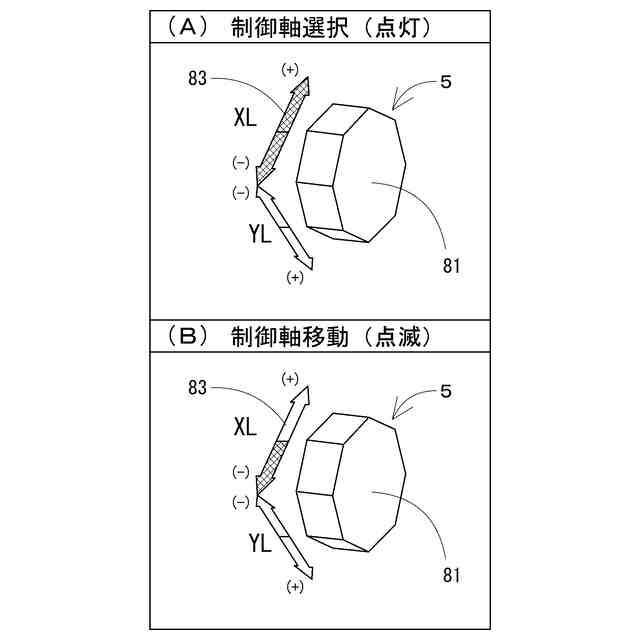
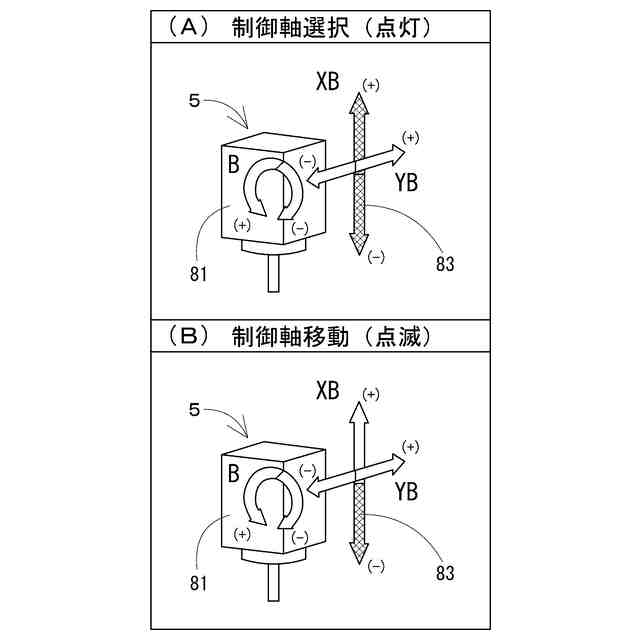
前記操作表示マークは、前記制御軸における移動方向または回転方向がプラス方向とマイナス方向とに分けて表示され、手動操作による前記駆動モータの回転に従った前記制御軸における移動方向または回転方向の表示部分が前記動作表示になる請求項2に記載する工作機械の操作システム。
【請求項4】
手動操作モードに切り換えられた前記操作表示装置のモニタに、前記工作機械を構成する前記複数の加工装置の装置マークが示され、前記操作表示マークは前記装置マークに対応して配置される請求項1に記載する工作機械の操作システム。
【請求項5】
前記工作機械が手動操作モードに切り換えられた前記操作表示装置のモニタは、前記操作表示マークとともに手動操作の種類を選択する選択ボタンが表示される請求項1乃至請求項4のいずれかに記載する工作機械の操作システム。
【請求項6】
前記工作機械が手動操作モードに切り換えられた前記操作表示装置のモニタは、前記操作表示マークとともに表示されたタッチパネルボタンが押されることにより、前記操作表示マークが手動操作の対象となる前記制御軸を選択するための選択ボタンとなる請求項1乃至請求項4のいずれかに記載する工作機械の操作システム。
【請求項7】
前記工作機械は、複数の前記加工装置が、第1加工を実行する第1系統、第2加工を実行する第2系統および、前記第1加工と前記第2加工の両方の加工を実行する第3系統に分けられ、前記制御装置には、前記第1系統と前記第3系統の前記制御装置を駆動制御する前記第1加工のための第1加工プログラムおよび、前記第2系統と前記第3系統の前記制御装置を駆動制御する前記第2加工のための第2加工プログラムが格納された請求項1に記載する工作機械の操作システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業者が対象となる制御軸を間違うことなく手動操作できるようにした工作機械の操作システムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
工作機械は、移動指令を行うために操作する操作盤を備えており、この操作盤には手動パルス発生器が設けられている。手動パルス発生器は、そのハンドル操作によって回転角度データがバスを介してプロセッサに読み取られる。そして、プロセッサからの移動指令に従ってサーボモータが回転し、所定の制御軸において移動操作が行われる。下記特許文献1には、工具の位置を表示する位置表示画面が設けられ、Z軸表示部、X-Y軸表示部および、ディジタル表示部から構成されている。Z軸表示部は、その領域が画面縦方向に棒状に設けられ、工具のZ軸方向への移動量に応じて、色分け等で区別表示されたカーソルが連続的に移動するようになっている。X-Y軸表示部は2次元平面に形成され、工具のX軸方向およびY軸方向への移動量に応じてカーソルが連続的に移動するようになっている。そして、ディジタル表示部は、工具の座標位置および機械座標位置がディジタルで表示される。
【先行技術文献】
【特許文献】
【0003】
特開平8-106317号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記従来例は、Z軸表示部およびX-Y軸表示部で工具の位置をアナログ表示することにより、工具のおおよその位置や移動方向が一目で確認できるものとして構成されている。ただし、この工作機械は、制御軸が工具を移動させるだけのものであるため、アナログ表示であっても確認し易い。そのため、作業者が手動パルス発生器を使用して工具を移動させる作業で間違いを生じる可能性は低いと考えられる。しかし、制御軸の数が多い多軸の工作機械の場合は、複数の駆動装置から正しく選択した制御軸において操作する必要があるが、その制御軸を間違えて操作してしまう操作ミスが生じやすい。仮に、作業者が選択を間違えてしまうと、意図しない制御軸において動作させてしまうことで、装置同士をぶつけるなどして破損させてしまうことがあり得る。
【0005】
そこで、本発明は、かかる課題を解決すべく、制御軸を間違うことなく手動操作できるようにした工作機械の操作システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る工作機械の操作システムは、各々の駆動モータによって所定方向の移動や回転を出力する複数の加工装置と、前記駆動モータによる所定方向の移動や回転を制御軸として前記加工装置を駆動制御する制御装置と、所定の操作を行うための押しボタンやタッチパネル式のモニタを備えた操作表示装置と、を有する工作機械であって、前記工作機械が前記操作表示装置の操作によって前記加工装置の駆動モータを手動で操作可能にする手動操作モードに切り換えられた場合に、前記操作表示装置のモニタには前記加工装置の制御軸に対応した操作表示マークが示され、手動操作の対象として選択された前記制御軸の前記操作表示マークが特定表示となるものである。
【発明の効果】
【0007】
前記構成によれば、作業者が操作表示装置の操作によって加工装置の駆動モータを手動で操作できるよう工作機械を手動操作モードに切り換えた場合に、操作表示装置のモニタには加工装置の制御軸に対応した操作表示マークが示され、手動操作の対象として選択した制御軸は、その操作表示マークが特定表示されるため、作業者が制御軸を間違うことなく手動操作することができる。
【図面の簡単な説明】
【0008】
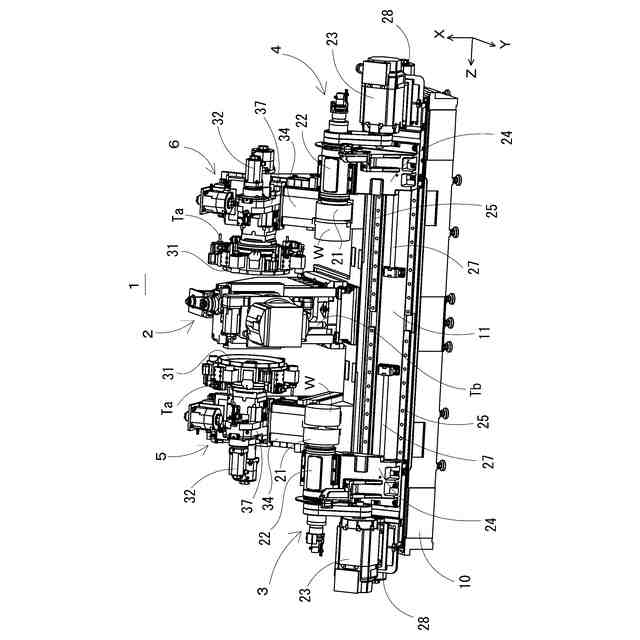
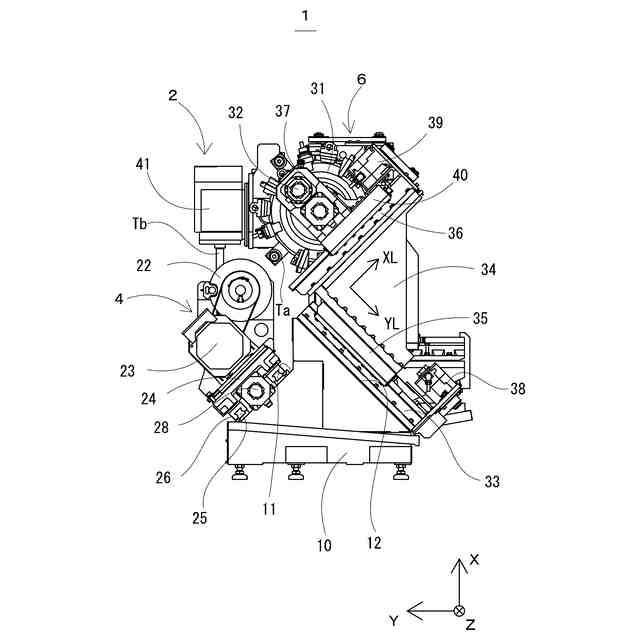
工作機械の一実施形態を示した機体内部構造の斜視図である。
工作機械の一実施形態を示した機体内部構造の側面図である。
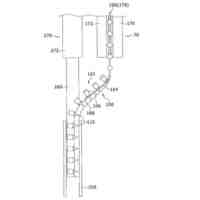
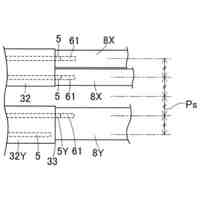
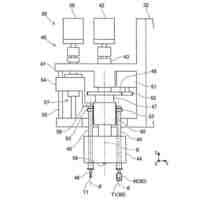
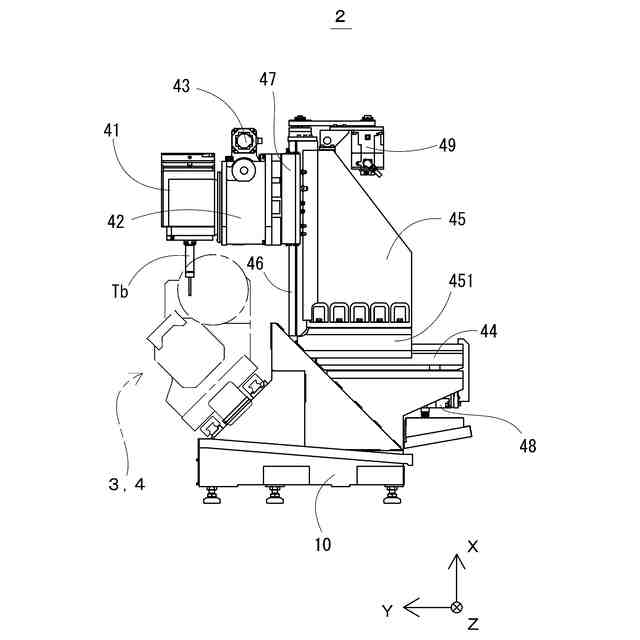
工作機械を構成する工具主軸装置を示した側面図である。
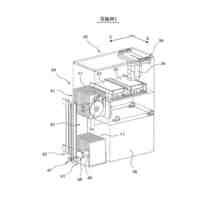
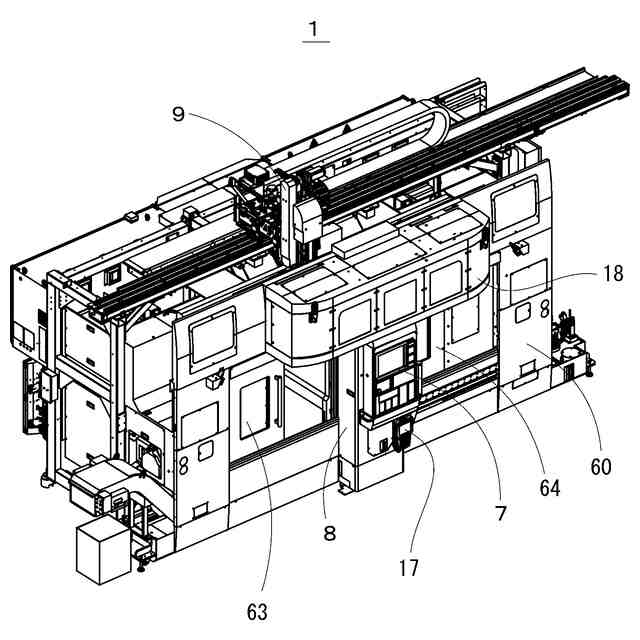
工作機械の一実施形態を示した外観斜視図である。
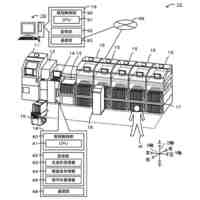
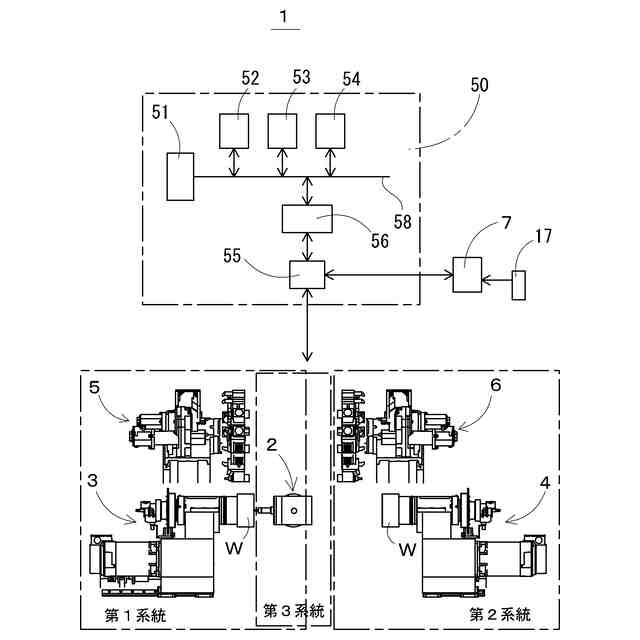
工作機械の制御システムを概念的に示した図である。
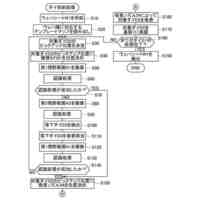
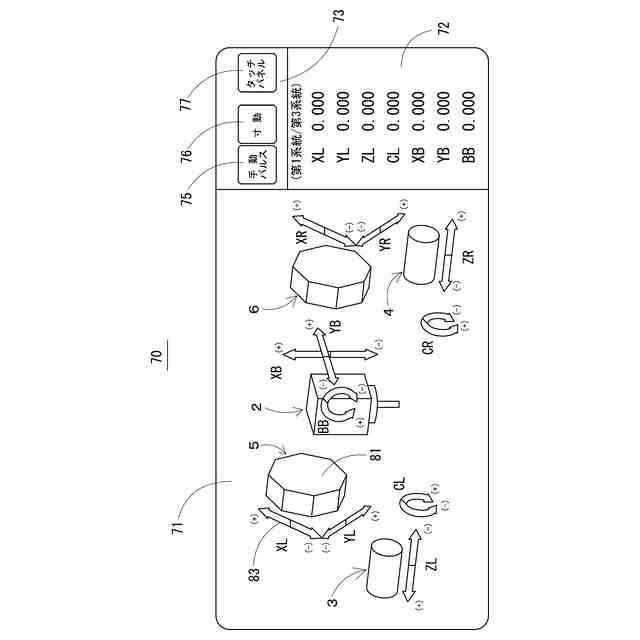
手動パルス発生器などの手動操作モードの際に表示される操作画面を示した図である。
操作表示部に表示された操作対象箇所の装置マークと操作表示マークとを示した図である。
操作表示部に表示された操作対象箇所の装置マークと操作表示マークとを示した図である。
【発明を実施するための形態】
【0009】
本発明に係る工作機械の操作システムの一実施形態について、図面を参照しながら以下に説明する。図1は、本実施形態の操作システムを搭載した工作機械の一例を示した図であり、機体の内部構造を示した斜視図である。また、図2は、同じく機体の内部構造を示した側面図である。本実施形態の工作機械1は、NC旋盤とマシニングセンタの両方の機能を持ち合わせた複合加工機である。具体的には、ワークWを把持する第1ワーク主軸装置3および第2ワーク主軸装置4と、複数の工具を有する第1タレット装置5および第2タレット装置6が、それぞれ左右対称に配置された対向2軸旋盤である。そして、機体中央には工具主軸装置2が設けられている。
【0010】
工作機械1は、こうした図面左側に位置する第1ワーク主軸装置3および第1タレット装置5が第1系統として構成され、図面右側に位置する第2ワーク主軸装置4および第2タレット装置6が第2系統として構成されている(図5参照)。工作機械1は、第1系統の第1加工と第2系統の第2加工が、各々の加工プログラムに従った独立の駆動制御によって実行される。その際、第3系統の工具主軸装置2は、第1系統や第2系統に加わり、各加工プログラムに従った駆動制御が行われる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
ストッカ
22日前
株式会社FUJI
テープフィーダ
1か月前
株式会社FUJI
リール回転装置
29日前
株式会社FUJI
ストッカシステム
1か月前
株式会社FUJI
リード部品供給装置
1か月前
株式会社FUJI
納品庫およびストッカ
8日前
株式会社FUJI
加工寸法管理システム
16日前
株式会社FUJI
ロッカーおよび管理方法
1か月前
株式会社FUJI
工作機械の操作システム
1日前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社FUJI
ピッキング条件決定システム
22日前
株式会社FUJI
ダイ供給装置及びダイ供給方法
8日前
株式会社FUJI
ダイ供給装置及びダイ供給方法
29日前
株式会社FUJI
対基板作業装置及び対基板作業方法
29日前
株式会社FUJI
保守装置、実装装置及び実装システム
1日前
株式会社FUJI
ストッカシステム、制御装置および表示方法
1か月前
株式会社FUJI
部品実装機、部品実装システムおよび部品実装方法
29日前
株式会社FUJI
交換装置
22日前
株式会社FUJI
部品実装機
22日前
株式会社FUJI
貸与システム
29日前
株式会社FUJI
情報処理装置、ストッカシステム、情報処理方法及びプログラム
10日前
株式会社FUJI
フィーダ、フィーダセットアップ装置およびキャリアテープ装填方法
16日前
株式会社FUJI
フィーダ入替システム
29日前
株式会社FUJI
フィーダ保管庫及び部品実装システム
10日前
積水樹脂株式会社
磁性シート
29日前
個人
車両レバー操作装置
29日前
株式会社FUJI
工作機械
2か月前
株式会社豊田自動織機
自動走行体
1か月前
株式会社豊田自動織機
無人走行体
1か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
エイブリック株式会社
基準電圧回路装置
1か月前
株式会社熊谷組
巡回ルート作成装置
1か月前
トヨタ自動車株式会社
搬送ロボット
8日前
トヨタ自動車株式会社
搬送システム
18日前
オムロン株式会社
自律作業システム
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ