TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024125588
公報種別
公開特許公報(A)
公開日
2024-09-19
出願番号
2023033501
出願日
2023-03-06
発明の名称
自動走行体
出願人
株式会社豊田自動織機
代理人
主分類
G05D
1/43 20240101AFI20240911BHJP(制御;調整)
要約
【課題】システムコントローラの有無に関係なくシャッタとの干渉を防止することができる自動走行体の提供にある。
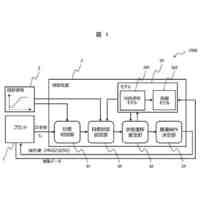
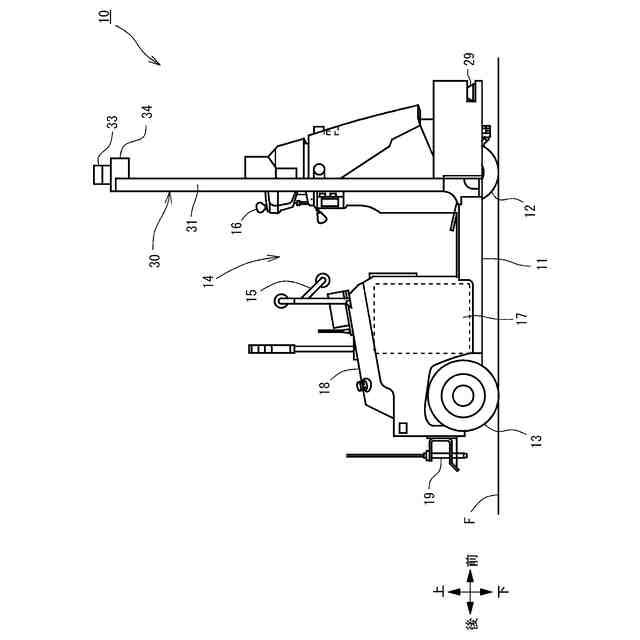
【解決手段】車体と、車体に搭載された走行駆動源と、走行駆動源を制御する車載コントローラ26と、車載コントローラ26と接続され、車体の上部の高さの障害物を検知する上方障害物検知センサと、を有する自動走行体10において、車載コントローラ26は、上方障害物検知センサの検知状態を認識した後、上方障害物検知センサが有効化される有効化範囲の設定の有無を判別し、有効化範囲の設定がされていないと判別され、かつ、上方障害物検知センサが検知状態を所定の時間以上継続するとき、走行駆動源を制御して走行を停止する。
【選択図】 図3
特許請求の範囲
【請求項1】
車体と、
前記車体に搭載された走行駆動源と、
前記走行駆動源を制御する車載コントローラと、
前記車載コントローラと接続され、前記車体の上部の高さの障害物を検知する上方障害物検知センサと、を有する自動走行体において、
前記車載コントローラは、前記上方障害物検知センサの作動状態を認識した後、前記上方障害物検知センサが有効化される有効化範囲の設定の有無を判別し、前記有効化範囲の設定がされていないと判別され、かつ、前記上方障害物検知センサの作動状態が検知状態で所定の時間以上継続するとき、前記走行駆動源を制御して走行を停止することを特徴とする自動走行体。
続きを表示(約 320 文字)
【請求項2】
前記車載コントローラは、前記有効化範囲の設定がされていないと判別され、かつ、前記上方障害物検知センサの作動状態が検知状態で所定の時間以上継続されたとき、前記上方障害物検知センサの作動状態を未検知状態から検知状態へ変更し、前記上方障害物検知センサの作動状態を検知状態と判別することにより、前記走行駆動源を制御して走行を停止することを特徴とする請求項1記載の自動走行体。
【請求項3】
警告を発する警告器が前記車体に搭載され、
前記車載コントローラは、前記上方障害物検知センサの作動状態を未検知状態から検知状態へ変更した後に前記警告器を作動させることを特徴とする請求項2記載の自動走行体。
発明の詳細な説明
【技術分野】
【0001】
この発明は、自動走行体に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
自動走行体の関係する従来技術として、例えば、特許文献1に開示された無人搬送車システムが知られている。特許文献1に開示された無人搬送車システムでは、無人搬送車の走行路をポイントで分割するとともに、交差点、オートシャッター、単線区間等の排他制御領域を設ける。無人搬送車は次のポイントへの走行に当たって、システムコントローラにブロッキングを要求し、システムコントローラはそのポイントがブロッキング済みでなければ走行許可を与えて、ポイントをブロッキングする。排他制御領域では、走行可能状態にあることを確認して、走行許可を与える。
【0003】
特許文献1に開示された無人搬送車システムによれば、ブロッキングによりポイントの通行権を無人搬送車に割り当て、ブロッキングの解除で他の無人搬送車に通行権を渡すことを可能にする。従って、ブロッキングとその解除との簡単な制御で、走行路をポイント単位に分割し、無人搬送車間の衝突を防止しながら走行制御できるとしている。例えば、オートシャッターが開状態では、無人搬送車が走行し、オートシャッターが閉状態では、無人搬送車は待機する。
【先行技術文献】
【特許文献】
【0004】
特開2001-100842号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
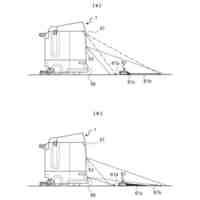
しかしながら、特許文献1に開示された無人搬送車システムは、走行路での無人搬送車の走行を制御するシステムコントローラを必要とする。ところで、自動走行体にシャッタを検知するシャッタ検知センサを設け、シャッタ検知センサがシャッタの開閉状態を検出することで、システムコントローラの有無に関わらず、シャッタとの干渉を防止することが考えられる。この場合、シャッタ検知センサがシャッタ以外の障害物を検出しても、自動走行体が停車するので、シャッタ検知センサが有効な範囲を予め設定することで有効な範囲以外での自動走行体の停車を防止できるが、この有効な範囲を正しく設定する必要がある。
【0006】
本発明は上記の問題点に鑑みてなされたもので、本発明の目的は、システムコントローラの有無に関係なく上方障害物との干渉を防止することができる自動走行体の提供にある。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本発明は、車体と、前記車体に搭載された走行駆動源と、前記走行駆動源を制御する車載コントローラと、前記車載コントローラと接続され、前記車体の上部の高さの障害物を検知する上方障害物検知センサと、を有する自動走行体において、前記車載コントローラは、前記上方障害物検知センサの作動状態を認識した後、前記上方障害物検知センサが有効化される有効化範囲の設定の有無を判別し、前記有効化範囲の設定がされていないと判別され、かつ、前記上方障害物検知センサの作動状態が検知状態で所定の時間以上継続するとき、前記走行駆動源を制御して走行を停止することを特徴とする。
【0008】
本発明では、車載コントローラは、上方障害物検知センサの検知状態を認識した後、上方障害物検知センサが有効化される有効化範囲の設定の有無を判別する。有効化範囲の設定がされていないと判別され、かつ、上方障害物検知センサが検知状態を所定の時間以上継続するとき、車載コントローラは、走行駆動源を制御して走行を停止する。このため、システムコントローラの有無に関係なく上方障害物との干渉を防止することができる。また、上方障害物検知センサが有効化される有効化範囲の設定の有無を判別するので、予め設定された有効化範囲に誤りがある場合や有効化範囲が未設定の場合であっても、上方障害物との干渉を防止できる。また、上方障害物検知センサが検知状態を所定の時間以上継続しない場合には、走行が停止されないので、無駄な走行停止を生じることがない。
【0009】
また、上記の自動走行体において、前記車載コントローラは、前記有効化範囲の設定がされていないと判別され、かつ、前記上方障害物検知センサの作動状態が検知状態で所定の時間以上継続されたとき、前記上方障害物検知センサの作動状態を未検知状態から検知状態へ変更し、前記上方障害物検知センサの作動状態を検知状態と判別することにより、前記走行駆動源を制御して走行を停止する構成としてもよい。
この場合、有効化範囲の設定がされていないと判別され、かつ、上方障害物検知センサの作動状態が検知状態で所定の時間以上継続するとき、上方障害物検知センサの作動状態を未検知状態から検知状態へ変更する。このため、予め設定された有効化範囲に誤りがある場合や有効化範囲が未設定の場合であっても、車載コントローラは、上方障害物検知センサの作動状態を検知状態と判別でき、上方障害物との干渉を確実に防止できる。
【0010】
また、上記の自動走行体において、警告を発する警告器が前記車体に搭載され、前記車載コントローラは、前記上方障害物検知センサの作動状態を未検知状態から検知状態へ変更した後に前記警告器を作動させる構成としてもよい。
この場合、車載コントローラは、上方障害物検知センサの作動状態を未検知状態から検知状態へ変更したことで、有効化範囲の設定に異常があることを認識でき、警告器を作動させることで、有効化範囲の設定に異常があることを周囲に報知することができる。
【発明の効果】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
6日前
積水樹脂株式会社
磁性シート
1か月前
ugo株式会社
移動体
6日前
個人
車両レバー操作装置
1か月前
エイブリック株式会社
基準電圧回路
1か月前
エイブリック株式会社
基準電圧回路装置
1か月前
トヨタ自動車株式会社
自律移動体
5日前
トヨタ自動車株式会社
搬送ロボット
19日前
トヨタ自動車株式会社
搬送システム
29日前
株式会社熊谷組
巡回ルート作成装置
1か月前
トヨタ自動車株式会社
自律移動システム
5日前
トヨタ自動車株式会社
位置推定システム
5日前
トヨタ自動車株式会社
ロボットシステム
29日前
株式会社栗本鐵工所
操作装置
20日前
株式会社FUJI
工作機械の操作システム
12日前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社ダイフク
物品搬送設備
29日前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
19日前
株式会社栗本鐵工所
触覚提示装置
1か月前
株式会社豊田自動織機
移動体制御システム
1か月前
横河電機株式会社
モジュール
1か月前
トヨタ自動車株式会社
操作装置及び移動ロボット
27日前
本田技研工業株式会社
運転補助装置
1か月前
株式会社日立製作所
制御装置、制御方法
1か月前
日本信号株式会社
自律走行ロボットシステム
1か月前
愛知製鋼株式会社
異常検知方法及び異常検知システム
1か月前
愛知製鋼株式会社
異常検知方法及び異常検知システム
1か月前
トヨタ自動車株式会社
移動体及びその異物付着防止方法
29日前
NTN株式会社
自動搬送車の誘導システム
1か月前
株式会社NTTドコモ
総括制御装置
1か月前
アルプスアルパイン株式会社
回転操作装置
6日前
株式会社デンソー
ペダル装置
19日前
ネクサン
低温流体用の機械的圧力調整器
1か月前
シャープ株式会社
制御システム及び制御方法
1か月前
ローランドディー.ジー.株式会社
生産実績記録システム
27日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ