TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024148924
公報種別
公開特許公報(A)
公開日
2024-10-18
出願番号
2023062510
出願日
2023-04-07
発明の名称
自律走行ロボットシステム
出願人
日本信号株式会社
代理人
個人
,
個人
主分類
G05D
1/43 20240101AFI20241010BHJP(制御;調整)
要約
【課題】走路に広範囲に存在する小さな凹凸を見つけることができる自律走行ロボットシステムを提供する。
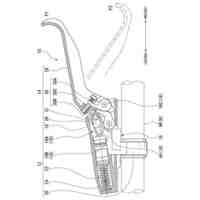
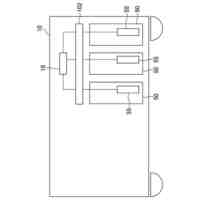
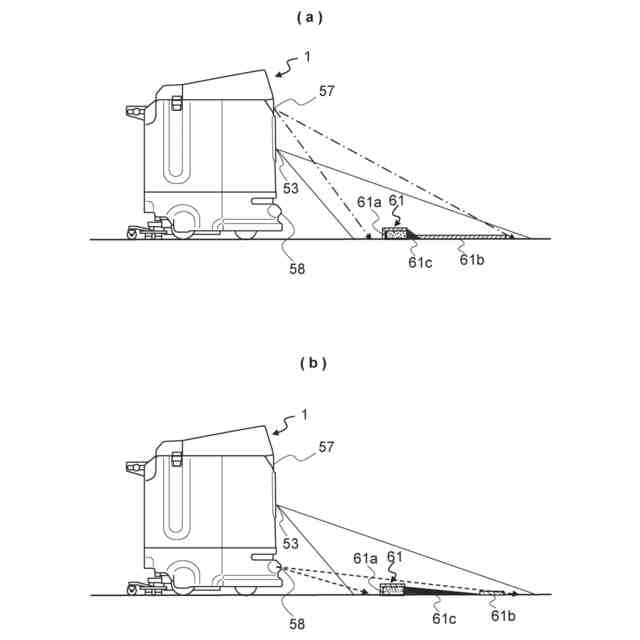
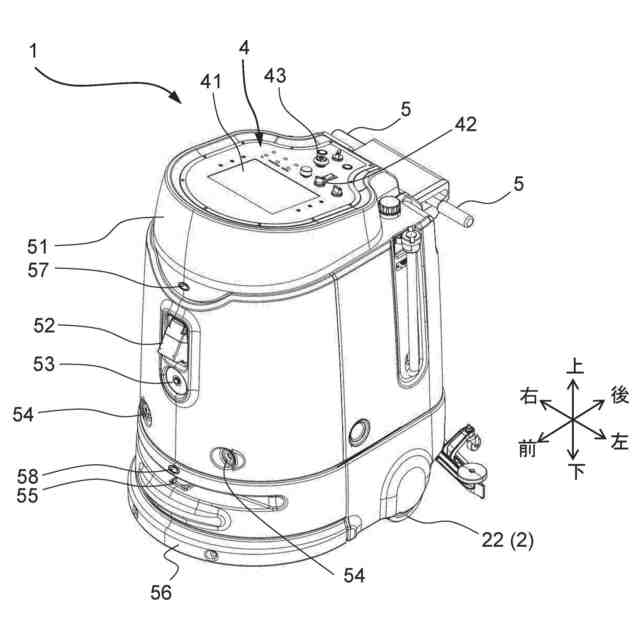
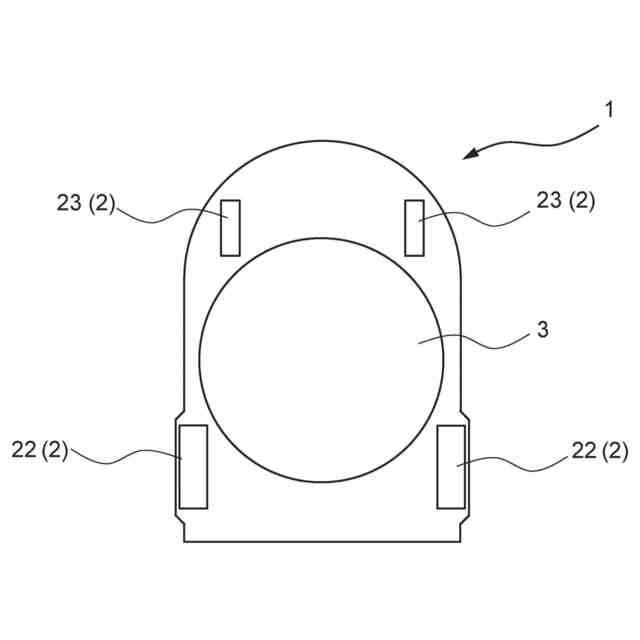
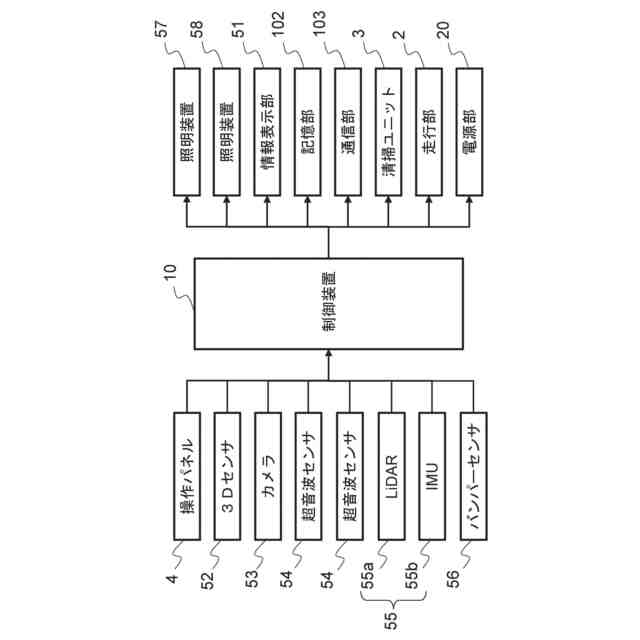
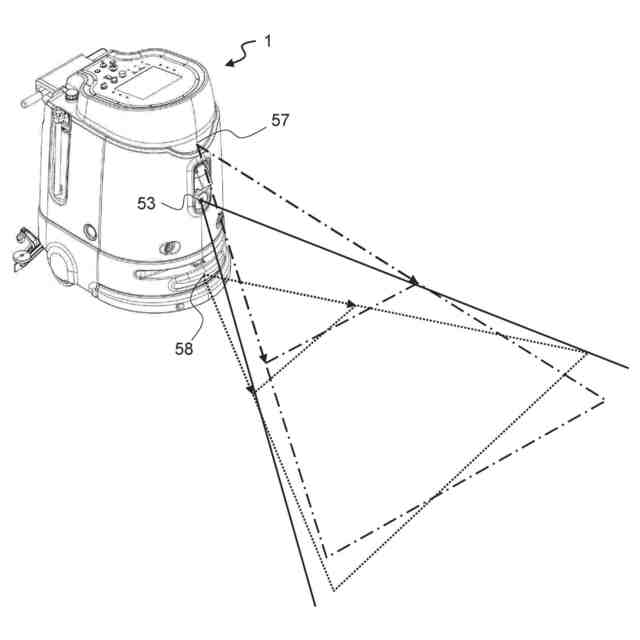
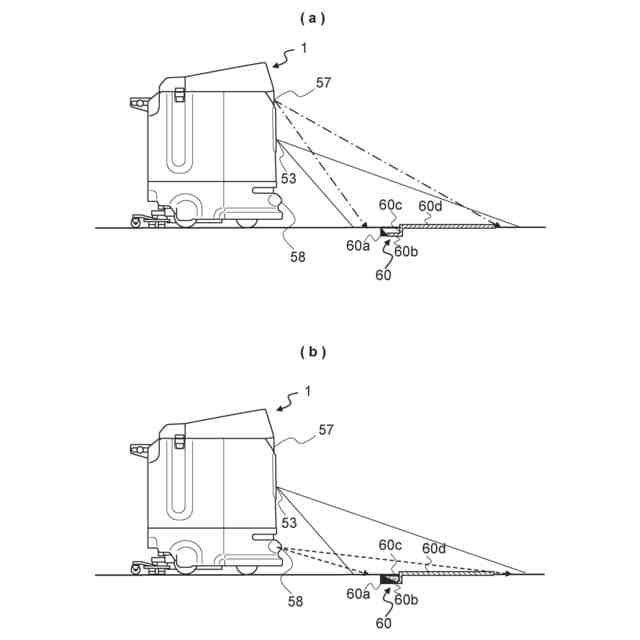
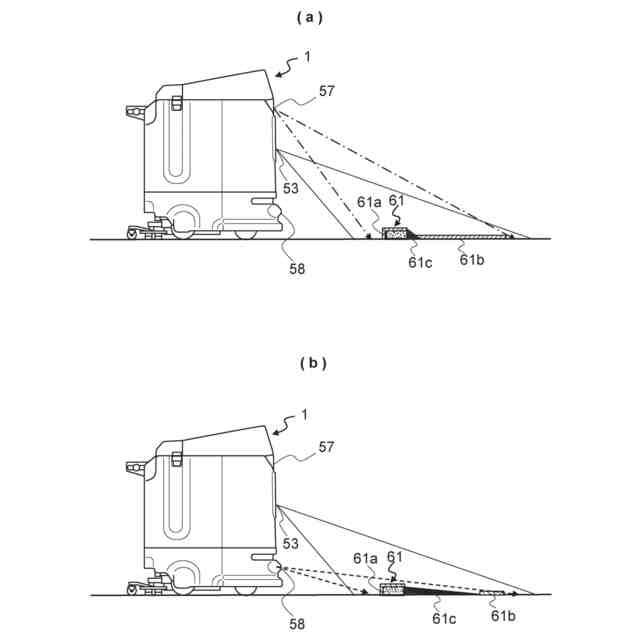
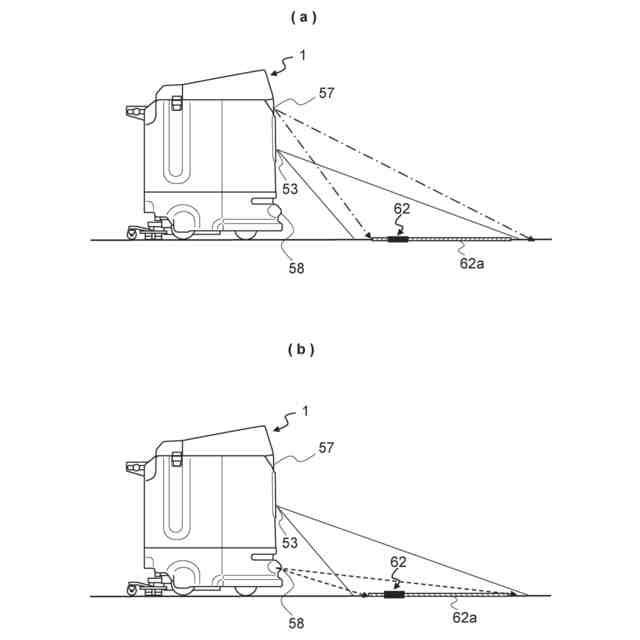
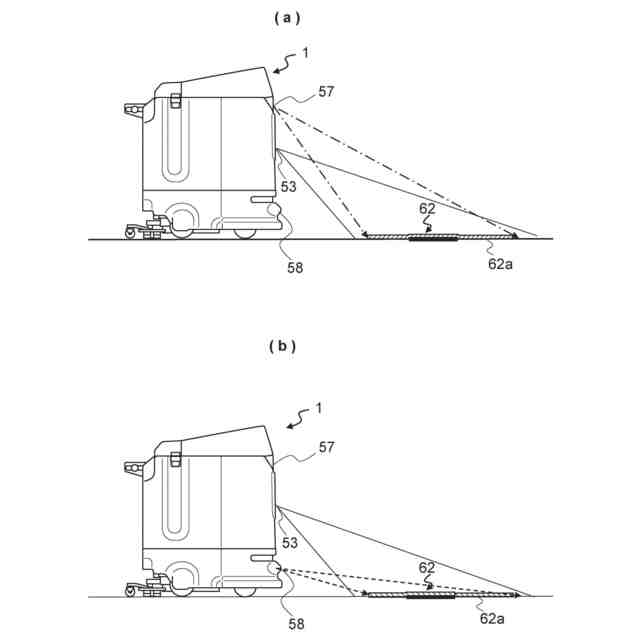
【解決手段】自律走行ロボットシステムは、走路面の状態を認識して自律走行するものである。このロボットシステムは、照明装置57,58と撮像装置53とを備える。照明装置は、進行方向の走路面に対して異なる角度で光を照射する。撮像装置は、照明装置による照明範囲の走路面を、照明装置と異なる位置から撮影する。そして、照明装置から異なる角度で光を照射したときに、撮像装置で撮影された走路面の陰影の差に基づいて走路面の状態を認識する、ことを特徴とする。
【選択図】図7
特許請求の範囲
【請求項1】
走路面の状態を認識して自律走行するロボットシステムであって、
進行方向の走路面に対して異なる角度で光を照射する照明装置と、
前記照明装置による照明範囲の走路面を、前記照明装置と異なる位置から撮影する撮像装置とを備え、
前記照明装置から異なる角度で光を照射したときに、前記撮像装置で撮影された走路面の陰影の差に基づいて走路面の状態を認識する、ことを特徴とする自律走行ロボットシステム。
続きを表示(約 840 文字)
【請求項2】
前記照明装置は、走路面に第1の角度で光を照射する第1の光源と、前記走路面に前記第1の角度と異なる第2の角度で光を照射する第2の光源とを含み、前記第1の光源と前記第2の光源で交互に光を照射する、ことを特徴とする請求項1に記載の自律走行ロボットシステム。
【請求項3】
前記照明装置は、走路面を第1の角度で可視光により照射する第1の光源と、走路面を前記第1の角度と異なる第2の角度で近赤外光で照射する第2の光源とを含み、前記第1の光源と前記第2の光源で走路面に交互に可視光と近赤外光を照射する、ことを特徴とする請求項1に記載の自律走行ロボットシステム。
【請求項4】
前記照明装置は、走路面を照射する光源と、この光源から照射する光をオン/オフするスイッチとを含み、前記光源からの光と自然光とを切り替えて交互に光を照射する、ことを特徴とする請求項1に記載の自律走行ロボットシステム。
【請求項5】
前記照明装置は水平方向に異なる角度で光を照射する、または前記照明装置は垂直方向に異なる角度で光を照射する、または前記照明装置は水平方向と垂直方向それぞれに異なる角度で光を照射する、ことを特徴とする請求項1に記載の自律走行ロボットシステム。
【請求項6】
前記撮像装置は、前記照明装置よりも高い位置から走路面の照明範囲を撮影する、ことを特徴とする請求項1乃至5いずれか1つの項に記載の自律走行ロボットシステム。
【請求項7】
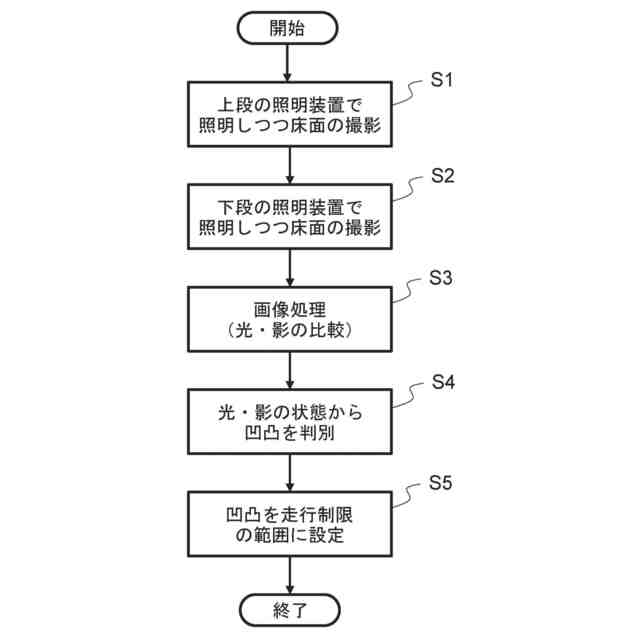
前記走路面の陰影の差に基づく走路面の状態の認識は、走路面の影と光の増減とその組み合わせにより、走路面の凹部、凸部及び模様を検出するものである、ことを特徴とする請求項1に記載の自律走行ロボットシステム。
【請求項8】
前記走路面の凹部または凸部を認識したときに、位置を記憶する記憶装置を更に備える、ことを特徴とする請求項7に記載の自律走行ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、予め作成した地図情報と走路情報に基づいて自律移動する自律走行ロボットシステムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
この種のロボットシステムでは、走行方向に対して前方の障害物を自らの判断で検出し、障害物の回避や走行を停止するようにしている。障害物の検出には、超音波やカメラによる画像処理で判断するもの、反射光の変化で判断するもの等が知られている。反射光による検出方式は、例えば走行方向前方の路面に走行方向とは交差する所定パターンのスリット光を照射し、それを撮像してパターンを解析することで前方の障害物の有無を判定する。
【0003】
特許文献1には、走行方向前方の路面にV字状のスリット光を照射し、凹部、凸部及び壁面等の障害物があると、その障害物の縁部で屈曲した照射スリット光の有無を判別し、床面の状態を認識して障害物を検出する、「走行ロボットの障害物検出装置」が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開平6-43935号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、水や洗浄剤を用いる床清掃ロボット(自走式床清掃装置)の場合、床面に点字ブロックのような凹凸があるとスクイージが密着できず、使用した水や洗剤を回収できないことがある。また、床清掃ロボットが点字ブロック上を走行すると、振動でねじの緩み等の故障の原因になるため、凹凸走行は最小限にしたい、という要望がある。
【0006】
しかしながら、特許文献1の技術では、直線ベクトルの屈曲点の有無から障害物を認識するため、点字ブロックのように広範囲に亙って存在する凹凸は見つけ難い。また、光の照射パターンの変化量から障害物を検出するため、小さな凹凸を見つけ難いという課題がある。しかも、光の反射光によりパターンマッチングを行うので、床面の模様(反射率差)を凹凸と誤判定する可能性がある。
【0007】
このため、作業員による障害物位置の記憶作業(ティーチングと呼ばれる)や地図情報の編集(制限区域設定)等を行って、点字ブロックのような凹凸を走行ルートから除外したり、走行速度や作業内容に制限をかけたりする必要があった。
【0008】
本発明は上記のような事情に鑑みてなされたもので、その目的とするところは、走路に広範囲に存在する小さな凹凸を見つけることができる自律走行ロボットシステムを提供することにある。
【課題を解決するための手段】
【0009】
本発明に係る自律走行ロボットシステムは、走路面の状態を認識して自律走行するロボットシステムであって、進行方向の走路面に対して異なる角度で光を照射する照明装置と、前記照明装置による照明範囲の走路面を、前記照明装置と異なる位置から撮影する撮像装置とを備え、前記照明装置から異なる角度で光を照射したときに、前記撮像装置で撮影された走路面の陰影の差に基づいて走路面の状態を認識する、ことを特徴とする。
【発明の効果】
【0010】
本発明の自律走行ロボットシステムによれば、照明装置から異なる角度で光を照射したときに、撮像装置で撮影された走路面の陰影の差に基づいて走路面の状態を認識するので、走路に広範囲に存在する小さな凹凸を見つけることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
1か月前
アズビル株式会社
制御装置
1か月前
コフロック株式会社
流量制御装置
1か月前
スター精密株式会社
工作機械
今日
株式会社丸和製作所
入力機器
1か月前
株式会社フジキン
流量制御装置
1か月前
株式会社豊田自動織機
荷役車両
26日前
株式会社シンテックホズミ
搬送ロボット
15日前
株式会社ダイフク
搬送設備
1か月前
株式会社村田製作所
温度補償回路
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
19日前
国立大学法人広島大学
モデル誤差抑制補償器
5日前
株式会社ダイフク
物品搬送設備
1か月前
旭精機工業株式会社
監視データ処理装置
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
トヨタ自動車株式会社
自律走行装置
5日前
日本精工株式会社
制御システムおよび制御方法
5日前
ミツミ電機株式会社
電源回路及びその起動方法
5日前
ローム株式会社
半導体装置
5日前
株式会社FUJI
工作機械
1か月前
ブラザー工業株式会社
調整方法及び数値制御装置
27日前
ローム株式会社
定電圧生成回路
19日前
キヤノン株式会社
制御システム及び制御方法
1か月前
株式会社マキタ
作業ロボット
1か月前
株式会社シマノ
人力駆動車の操作装置
26日前
アズビル株式会社
保全システム
26日前
株式会社エイトノット
情報処理システム
9日前
ミネベアパワーデバイス株式会社
半導体装置
1か月前
株式会社デジタルカレッジKAGA
物体搬送システム
19日前
富士電機株式会社
分析装置、分析方法及びプログラム
1か月前
トヨタ自動車株式会社
管理システム
19日前
富士電機株式会社
制御装置、制御方法、及びプログラム
13日前
株式会社クボタ
フロントローダの操作機構及び作業車両
23日前
大阪瓦斯株式会社
二次圧制御機構、及び制御方法
12日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ