TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025025771
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023130882
出願日
2023-08-10
発明の名称
管理システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人中部国際特許事務所
主分類
G05D
1/43 20240101AFI20250214BHJP(制御;調整)
要約
【課題】複数の移動体の消費エネルギの低減を良好に図ることである。
【解決手段】本管理システムにおいて、複数の移動体の各々が目的地に到達すると予想される到着予想時刻のうち最も遅い時刻が基準時刻とされる。そして、複数の移動体のうち、基準時刻で目的地に到着すると予測される移動体を除く1つ以上の移動体の各々について、到達予想時刻が前記基準時刻に近づき、かつ、消費エネルギが少なくなるように、目的地までの走行経路と走行速度とが決定される。それにより、複数の移動体全体における消費エネルギの低減を良好に図ることができる。
【選択図】図4
特許請求の範囲
【請求項1】
複数の移動体の移動を管理する管理システムであって、
前記複数の移動体の各々について、移動体が目的地に到達すると予想される到着予想時刻を取得し、これらのうち最も遅い時刻を基準時刻とし、
前記複数の移動体のうち前記到着予想時刻が前記基準時刻の前である1つ以上の移動体の各々について、前記到達予想時刻が前記基準時刻に近づき、かつ、消費エネルギが少なくなるように、前記目的地までの走行経路と走行速度とを決定する走行経路等決定部を含む管理システム。
続きを表示(約 610 文字)
【請求項2】
前記走行経路等決定部が、前記走行速度を、前記走行経路において許可される最高の速度である最高速度に決定する請求項1に記載の管理システム。
【請求項3】
前記走行経路等決定部が、前記複数の移動体の各々について、それぞれ、前記目的地までの走行経路と走行速度とを、暫定的に、前記目的地まで走行するのに要する時間である所要時間が最も短くなるように決定し、前記暫定的に決定した前記走行経路と前記走行速度とに基づいて、前記複数の移動体の各々について、前記移動体が前記目的地に到達すると予想される到着予想時刻を取得する到着予想時刻取得部を含む請求項1または2に記載の管理システム。
【請求項4】
前記走行経路等決定部が、前記複数の移動体の各々について、前記目的地までの走行経路と走行速度とを暫定的に決定し、
前記暫定的に決定した前記走行経路と前記走行速度とに基づいて、前記複数の移動体の各々について、前記到着予想時刻を取得し、
前記複数の移動体のうち前記到着予想時刻が前記基準時刻より前である1つ以上の移動体の各々について、前記到着予想時刻が前記基準時刻より遅くならない範囲で、消費エネルギが最少になるように、前記暫定的に決定された前記走行経路と前記走行速度との少なくとも一方を変更して、前記走行経路と前記走行速度とを再決定する請求項1または2に記載の管理システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の移動を管理する管理システムに関するものである。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、複数の車両の各々において、目的地への到着希望時刻と到着予想時刻とを比較し、これらの比較結果に基づいて、複数の車両の各々における走行状態を制御する走行状態制御装置が記載されている。走行状態制御装置において、複数の車両の各々において、到着予想時刻が到着希望時刻より後である場合には、制限速度上限モードが設定されて移動ペースが引き上げられ、到着予想時刻が到着希望時刻より前である場合には、省燃料運転モードが設定されて、移動ペースが引き下げられる。
【先行技術文献】
【特許文献】
【0003】
特開平11-39592号公報
【発明の概要】
【0004】
【発明が解決しようとする課題】
【0005】
本発明の課題は、複数の移動体の消費エネルギの低減を良好に図ることである。
【課題を解決するための手段】
【0006】
本発明に係る管理システムにおいて、複数の移動体の各々が目的地に到達すると予想される到着予想時刻のうち最も遅い時刻が基準時刻とされる。そして、複数の移動体のうち、基準時刻で目的地に到着すると予測される移動体を除く1つ以上の移動体の各々について、到達予想時刻が前記基準時刻に近づき、かつ、消費エネルギが少なくなるように、目的地までの走行経路と走行速度とが決定される。それにより、複数の移動体全体における消費エネルギの低減を良好に図ることができる。
【図面の簡単な説明】
【0007】
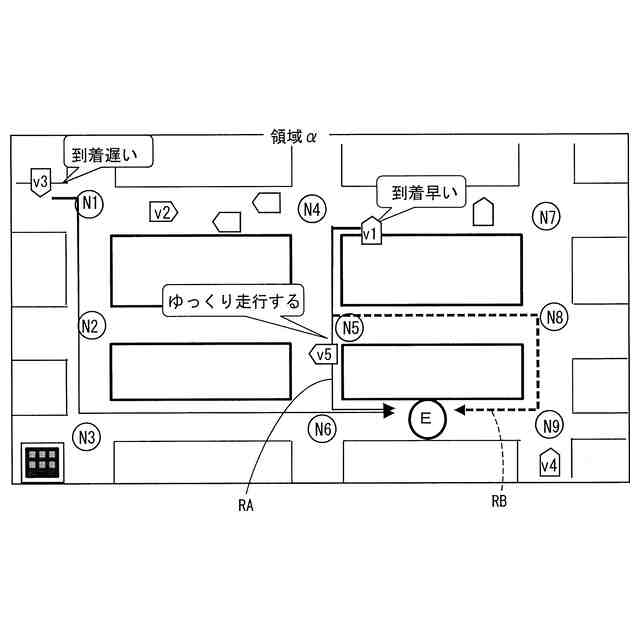
本発明の一実施形態に係る管理システムにおいて複数の移動体が移動する領域を模式的に示す平面図である。
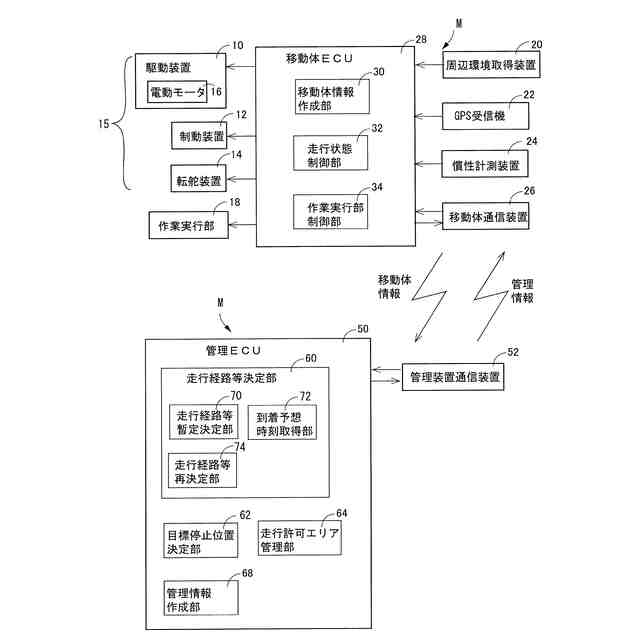
上記複数の移動体および上記管理システムに含まれる管理装置を概念的に示す図である。
上記管理システムにおいて到着予想時刻の取得方法を説明するための図である。
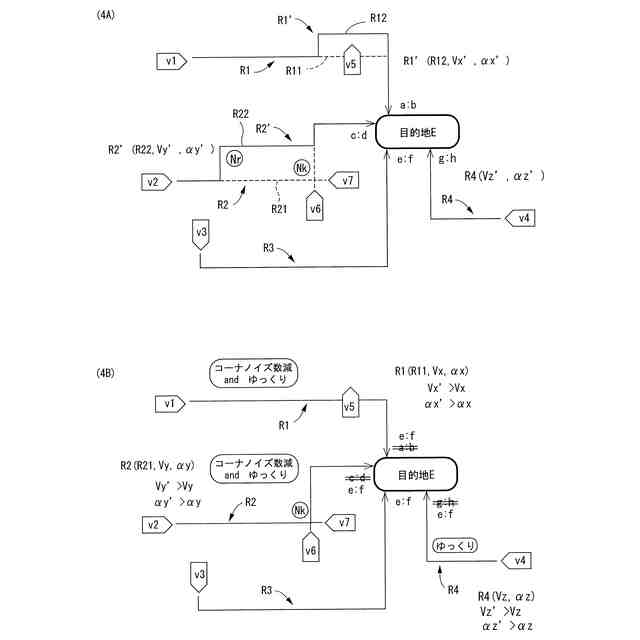
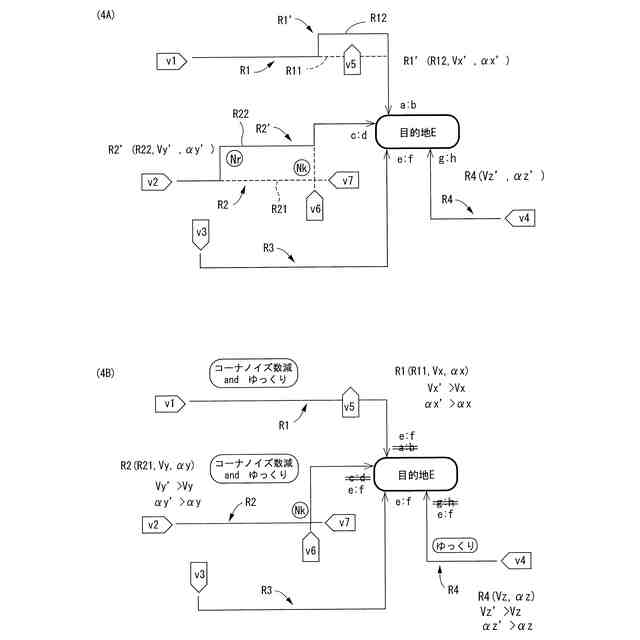
上記走行経路の決定方法の一例を示す図である。(4A)暫定的に決定された走行経路の一例を示す図である。(4B)到着予想時刻を基準時刻に近づけ、消費エネルギを小さくして決定された走行経路の一例を示す図である。
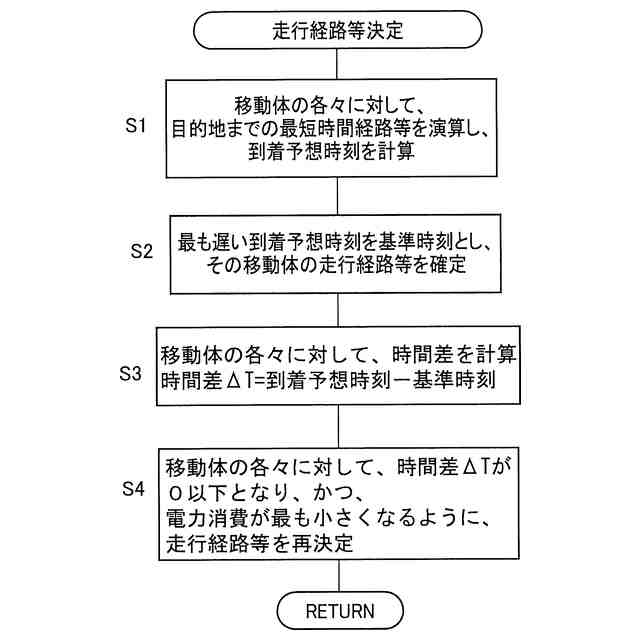
上記管理システムの管理装置に記憶された走行経路等決定プログラムを表すフローチャートである。
【発明を実施するための形態】
【0008】
以下、本発明の一実施形態に係る管理システムを、図面に基づいて詳細に説明する。管理システムは管理装置Mを含む。複数の移動体Vの移動は管理装置Mにより管理される。
【実施例】
【0009】
図1に示すように、領域αは予め定められた領域であり、例えば、工場としたり、私有地としたりすること等ができる。領域αの内部において、既知である人以外の一般の歩行者も既知である移動体以外の一般の移動体等も存在しないと考えられる。
【0010】
領域αの内部において、複数の移動体v(v1,v2,v3・・・)が荷物の搬送等の作業を行っている。複数の移動体vの各々は目的地Eまで移動する。目的地Eは、複数の移動体vに共通に設定される。目的地Eにおいて、複数の移動体vの間で、それぞれ、荷物の受け渡し等が行われる。複数の移動体vは、荷物の受け渡しが終了した後に、次の目的地に向かって移動するのが普通である。そのため、複数の移動体vの各々において、目的地Eにおける待ち時間は短い方が望ましい。また、作業において、複数の移動体vの消費エネルギは少ない方が望ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ