TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024142889
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023055275
出願日
2023-03-30
発明の名称
無人走行体の走行制御システム
出願人
株式会社豊田自動織機
代理人
主分類
G05D
1/43 20240101AFI20241003BHJP(制御;調整)
要約
【課題】無人走行体を非自動走行によって走行経路へ復帰させて無人走行に切り換えても、無人走行体の走行経路からの逸脱を防止できる無人走行体の走行制御システムの提供にある。
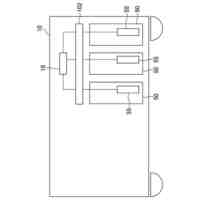
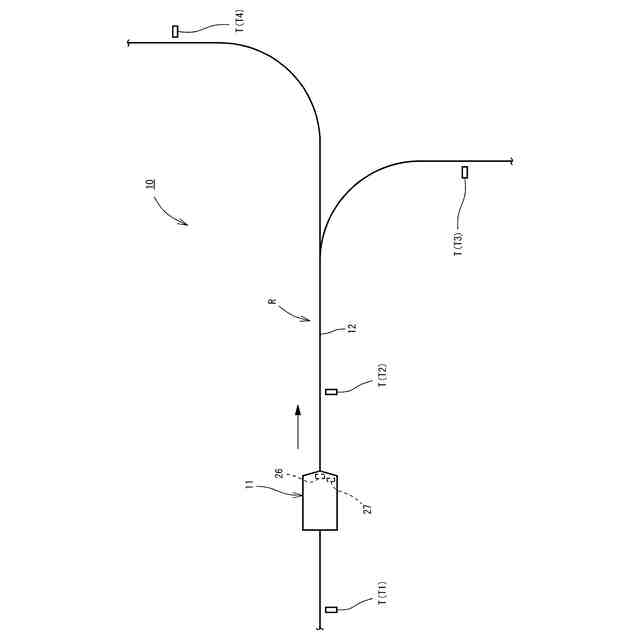
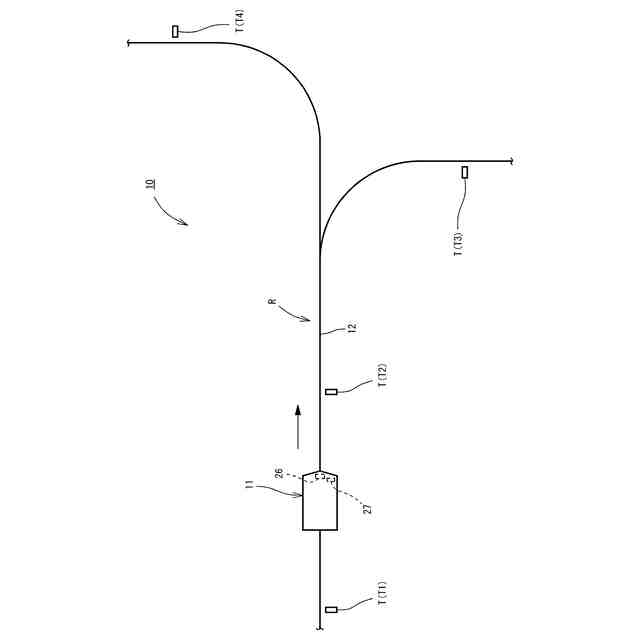
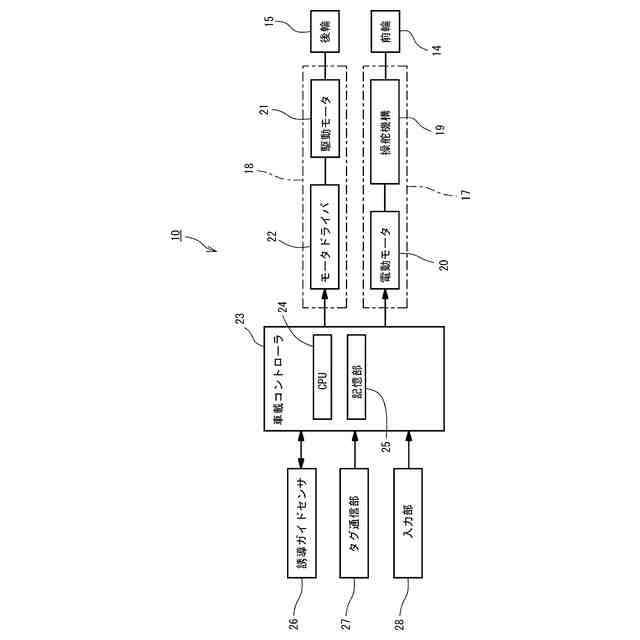
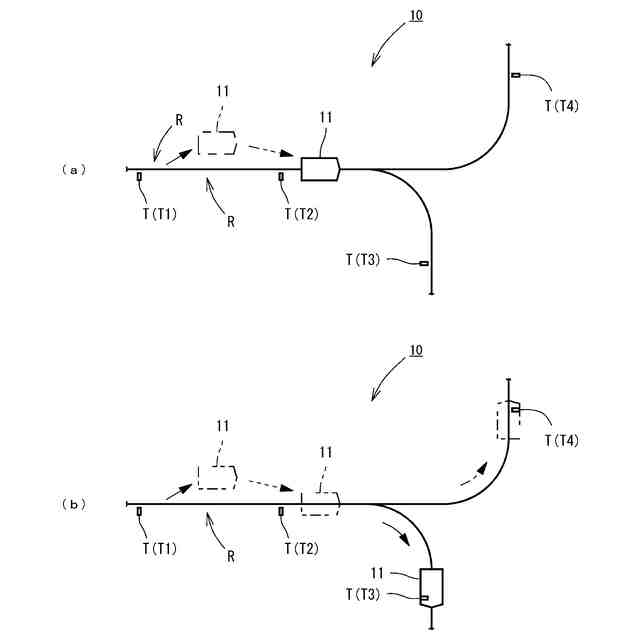
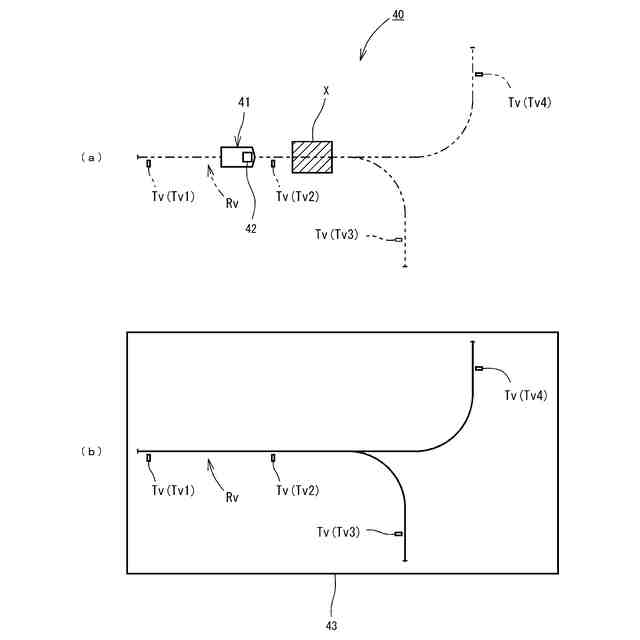
【解決手段】無人走行体と、無人走行体Rの走行経路と、走行経路Rに沿って設定され、タグ番号が格納された情報タグTと、を有し、無人走行体は、走行駆動部と、情報タグTを検知する情報タグ検知部と、走行駆動部を制御するコントローラと、を有し、コントローラは、情報タグ検知部により取得されたタグ番号に基づき走行駆動部を制御する。タグ番号をコントローラへ入力可能とする入力部を備え、走行経路Rは、無人走行体が通過する情報タグTのタグ番号により設定される経路を含み、無人走行体は、手動操作による非自動走行が可能であり、コントローラは、非自動走行から自動走行へ切り換えられたとき、走行速度を通常の自動走行時の走行速度よりも低速に設定する。
【選択図】 図1
特許請求の範囲
【請求項1】
自動走行可能な無人走行体と、
予め設定された前記無人走行体の走行経路と、
前記走行経路に沿って設定され、前記無人走行体の速度設定のためのタグ番号が格納された情報タグと、を有し、
前記無人走行体は、
走行駆動部と、
前記情報タグを検知する情報タグ検知部と、
前記走行駆動部を制御するコントローラと、を有し、
前記コントローラは、前記情報タグ検知部により取得された前記タグ番号に基づき前記走行駆動部を制御する無人走行体の走行制御システムにおいて、
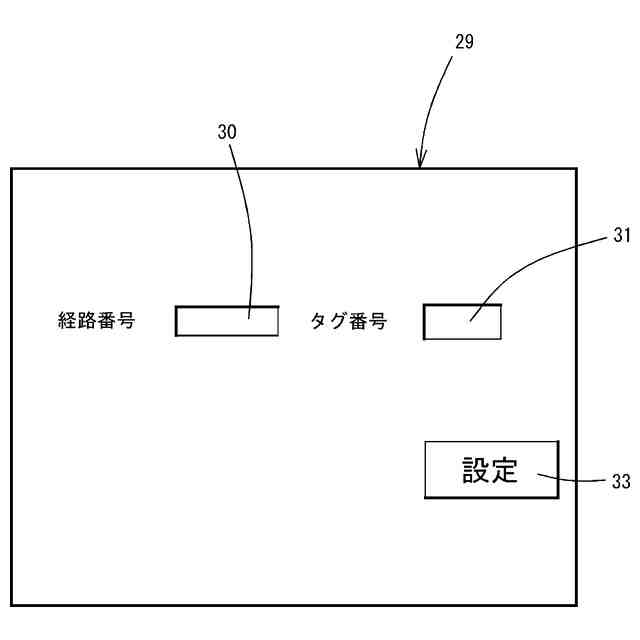
前記タグ番号を前記コントローラへ入力可能とする入力部を備え、
前記走行経路は、前記無人走行体が通過する前記情報タグのタグ番号により設定される経路を含み、
前記無人走行体は、手動操作による非自動走行が可能であり、
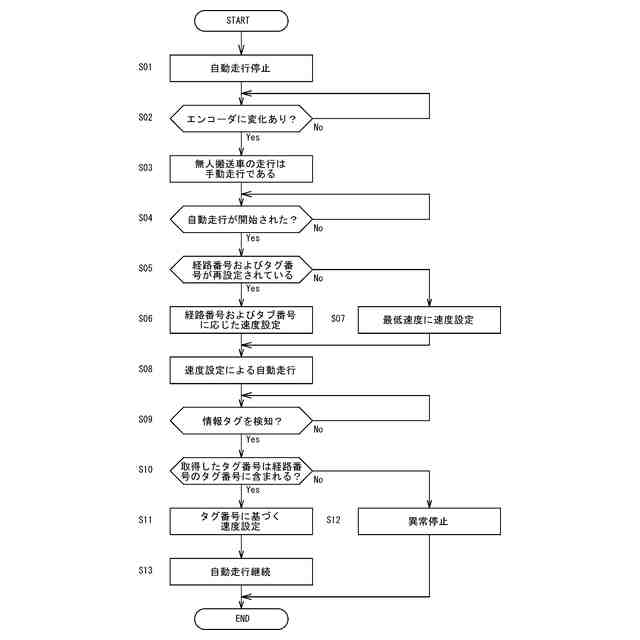
前記コントローラは、前記無人走行体の走行が前記非自動走行から前記自動走行へ切り換えられたとき、前記無人走行体の走行速度を通常の自動走行時の走行速度よりも低速に設定することを特徴とする無人走行体の走行制御システム。
続きを表示(約 400 文字)
【請求項2】
前記コントローラは、前記非自動走行から前記自動走行へ切り換え後の低速走行により最初に検知された情報タグから得られるタグ番号が、前記コントローラに予め設定されている前記経路の情報タグに含まれるか否かを判別し、
前記タグ番号が前記経路の情報タグに含まれないと判別されたとき、前記無人走行体を停止することを特徴とする請求項1記載の無人走行体の走行制御システム。
【請求項3】
前記走行経路は、前記コントローラに記憶された地図に設定された仮想走行経路であり、
前記情報タグは、前記仮想走行経路に沿って予め設定された仮想情報タグであり、
前記無人走行体が走行する路面には、前記非自動走行から前記自動走行に切り換えるための復旧位置が設定され、
前記復旧位置は可視化されていることを特徴とする請求項1又は2記載の無人走行体の走行制御システム。
発明の詳細な説明
【技術分野】
【0001】
この発明は、無人走行体の走行制御システムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
無人走行体の走行制御システムの従来技術としては、例えば、特許文献1に開示された自動走行台車の走行制御方法およびシステムが知られている。特許文献1に開示された自動走行台車の走行制御システムでは、自動走行台車は、下部に複数の車輪を備え、そのうち少なくとも一つの車輪を駆動回転させることにより、床面に設けた誘導線に沿って所定の走行経路を駆動走行可能に構成されている。誘導線は、高い光反射性を有する光反射式帯状体であり、自動走行台車には誘導線を検出するための光照射部および反射式光電管よりなるセンサに設けられる。
【0003】
特許文献1に開示された自動走行台車の走行制御システムでは、例えば、自動走行台車を特定のステーションで停止させる手段として、床面上における誘導線近傍の適宜の位置にRFID用タグにより構成されるエリア用記憶体を設けている。自動走行台車は、このエリア用記憶体から走行に関するデータを受信するための受信装置を有している。この場合、受信装置がエリア用記憶体の走行に関するデータを受信し、例えば、走行に関するデータが停止の指示であれば、自動走行台車を特定のステーションに停止させることができる。なお、エリア用記憶体には、自動走行台車を停止させるだけでなく、高速走行や低速走行といった自動走行台車の走行に関するデータを記憶させることが可能である。
【0004】
ところで、この種の自動走行台車の走行制御システムでは、自動走行台車が何らかの原因で走行経路から外れた場合、例えば、作業者が手動操作による走行(手動走行)によって走行経路へ復帰させることが考えられる。あるいは、走行経路に障害物が存在して自動走行台車が停止した場合にも、例えば、手動走行によって障害物を回避して走行経路へ復帰させる場合もあり得る。そして、走行経路に復帰させた後に、手動走行から自動走行に切り換えることで自動走行台車の自動走行が行われる。
【先行技術文献】
【特許文献】
【0005】
特開2008-3785号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示された走行制御システムでは、手動走行から自動走行に切り換えたとき、走行経路から外れる直前にエリア用記憶体から取得したデータに基づいて自動走行を再開する。このため、例えば、復帰した位置が低速走行の指示によって走行するカーブ区間であるにもかかわらず、走行経路から外れる直前に取得したエリア用記憶体のデータが高速走行の指示であれば、自動走行台車が走行経路から逸脱するおそれがある。なお、手動走行から自動走行に切り換える前に、適切な速度設定を自動走行台車に設定することも考えられるが、設定作業は煩雑である。
【0007】
本発明は上記の問題点に鑑みてなされたもので、本発明の目的は、無人走行体を非自動走行によって走行経路へ復帰させて無人走行に切り換えても、無人走行体の走行経路からの逸脱を防止できる無人走行体の走行制御システムの提供にある。
【課題を解決するための手段】
【0008】
上記の課題を解決するために、本発明は、自動走行可能な無人走行体と、予め設定された前記無人走行体の走行経路と、前記走行経路に沿って設定され、前記無人走行体の速度設定のためのタグ番号が格納された情報タグと、を有し、前記無人走行体は、走行駆動部と、前記情報タグを検知する情報タグ検知部と、前記走行駆動部を制御するコントローラと、を有し、前記コントローラは、前記情報タグ検知部により取得された前記タグ番号に基づき前記走行駆動部を制御する無人走行体の走行制御システムにおいて、前記タグ番号を前記コントローラへ入力可能とする入力部を備え、前記走行経路は、前記無人走行体が通過する前記情報タグのタグ番号により設定される経路を含み、前記無人走行体は、手動操作による非自動走行が可能であり、前記コントローラは、前記無人走行体の走行が前記非自動走行から前記自動走行へ切り換えられたとき、前記無人走行体の走行速度を通常の自動走行時の走行速度よりも低速に設定することを特徴とする。
【0009】
本発明では、コントローラは、無人走行体の走行が非自動走行から自動走行へ切り換えられたとき、走行速度を通常の自動走行時の走行速度よりも低速に設定する。このため、非自動走行から自動走行へ切り換えられたときの走行経路における無人走行体の位置に関わらず、無人走行体は、次の記憶部と通信するまで低速走行を行う。よって、無人走行体を手動走行によって走行経路へ復帰させて無人走行に切り換えても、自動走行の再開後の無人走行体の走行経路からの逸脱を防止できる。
【0010】
また、上記の無人走行体の走行制御システムにおいて、前記コントローラは、前記非自動走行から前記自動走行へ切り換え後の低速走行により最初に検知された情報タグから得られるタグ番号が、前記コントローラに予め設定されている前記経路の情報タグに含まれるか否かを判別し、前記タグ番号が前記経路の情報タグに含まれないと判別されたとき、前記無人走行体を停止する構成としてもよい。
この場合、無人走行体が低速で走行して最初に検知された情報タグから得られるタグ番号が、コントローラに予め設定されている経路番号の情報タグに含まれているか否かを判別する。最初に検知された情報タグから得られるタグ番号がコントローラに予め設定されている経路番号の情報タグに含まれてないと判別されたとき、コントローラは、無人走行体を停止する。つまり、走行すべき経路番号の経路を走行していないという異常によって無人走行体を速やかに停止させることができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
1か月前
アズビル株式会社
制御装置
1か月前
コフロック株式会社
流量制御装置
1か月前
スター精密株式会社
工作機械
今日
株式会社丸和製作所
入力機器
1か月前
株式会社フジキン
流量制御装置
1か月前
株式会社豊田自動織機
荷役車両
26日前
株式会社ダイフク
搬送設備
1か月前
株式会社村田製作所
温度補償回路
1か月前
株式会社シンテックホズミ
搬送ロボット
15日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
19日前
国立大学法人広島大学
モデル誤差抑制補償器
5日前
株式会社ダイフク
物品搬送設備
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
トヨタ自動車株式会社
自律走行装置
5日前
ローム株式会社
半導体装置
5日前
ミツミ電機株式会社
電源回路及びその起動方法
5日前
日本精工株式会社
制御システムおよび制御方法
5日前
ブラザー工業株式会社
調整方法及び数値制御装置
27日前
ローム株式会社
定電圧生成回路
19日前
株式会社FUJI
工作機械
1か月前
アズビル株式会社
保全システム
26日前
キヤノン株式会社
制御システム及び制御方法
1か月前
株式会社マキタ
作業ロボット
1か月前
株式会社シマノ
人力駆動車の操作装置
26日前
株式会社エイトノット
情報処理システム
9日前
ミネベアパワーデバイス株式会社
半導体装置
1か月前
株式会社デジタルカレッジKAGA
物体搬送システム
19日前
トヨタ自動車株式会社
管理システム
19日前
株式会社クボタ
フロントローダの操作機構及び作業車両
23日前
富士電機株式会社
制御装置、制御方法、及びプログラム
13日前
大阪瓦斯株式会社
二次圧制御機構、及び制御方法
12日前
富士通株式会社
演算プログラム、演算方法、および情報処理装置
5日前
NTN株式会社
制御装置、および制御方法
23日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ