TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024158198
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023073186
出願日
2023-04-27
発明の名称
モデルフリーポジカスト制御
出願人
CKD日機電装株式会社
代理人
主分類
G05B
13/02 20060101AFI20241031BHJP(制御;調整)
要約
【課題】
ポジカスト制御(むだ時間要素をコントローラに用いた制振制御)はモデルベース制御であり、設計には制御対象のモデルが必要である。本発明では、制御対象の応答データをもとにポジカストコントローラのパラメータ値を定め、制振制御を行う方法を提供する。
【解決手段】
ポジカスト制御では、制御量が目標値に一致するのは、コントローラに整定時間として設定した時刻以降である。この整定時間以降の制御出力データを目標値に一致させるような数値的最適化によって、ポジカストコントローラのパラメータ値が容易に定まり、制振制御を行うことができる。
【選択図】図5
特許請求の範囲
【請求項1】
ポジカスト制御で想定される整定時間以降における、制御の対象の挙動に関するデータに注目した数値計算によって、ポジカストコントローラのパラメータ値を定めることを特徴とするモデルフリー制振制御方式
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御系の設計法に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
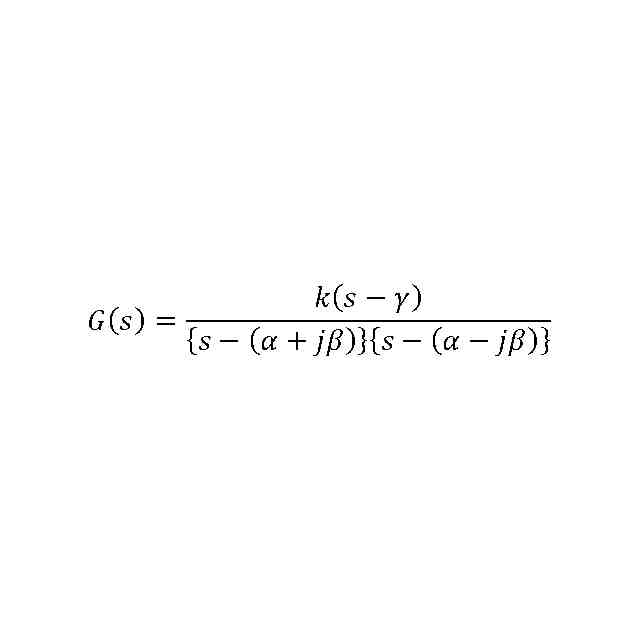
ポジカスト制御(特許文献1、非特許文献1)は、むだ時間要素をコントローラとして利用したフィードフォワードの制振制御法である。数1の2次振動系の制御を例にその概要を述べる。
TIFF
2024158198000002.tif
10
59
ただしsはラプラス演算子、jは虚数単位である。目標値を数2のステップ信号とする。
TIFF
2024158198000003.tif
8
16
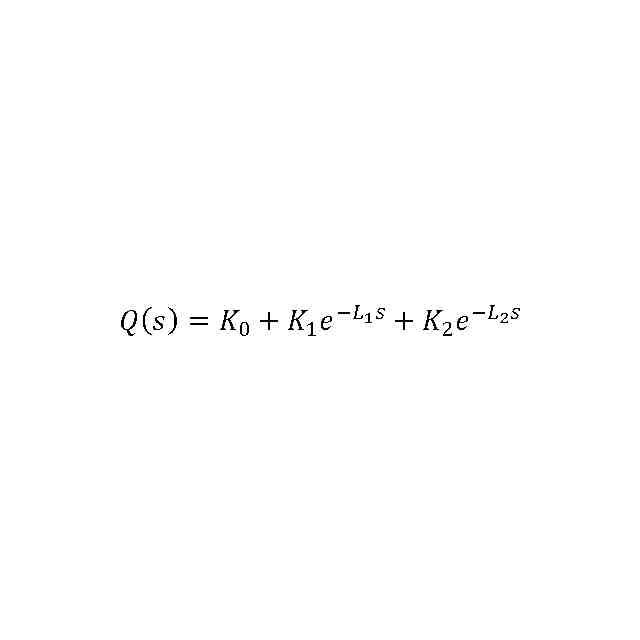
フィードフォワードコントローラを数3とする。
TIFF
2024158198000004.tif
4
51
ここで必要なむだ時間要素の個数は、制御対象の次数と目標値の次数で決まる。制御系を図1に示す。
【0003】
数3の零点を数1の極の位置に設定することにより、数1の極を極零消去することができる。その条件が数4である。
TIFF
2024158198000005.tif
5
84
フィードフォワード制御誤差を数5で定義する。数2の極 s = 0 に関して数6を満たせば、最終値の定理より数7となり、定常偏差が残らない。
TIFF
2024158198000006.tif
15
115
TIFF
2024158198000007.tif
4
53
TIFF
2024158198000008.tif
6
42
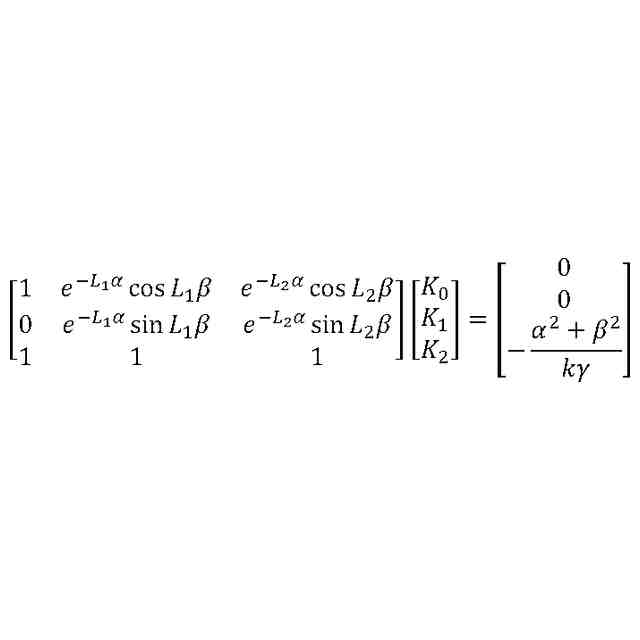
なお信号はラプラス領域sでは大文字、時間領域tでは小文字で表す。オイラーの公式(数8)により数4を変形し、数6と共にまとめると数9を得る。
TIFF
2024158198000009.tif
5
33
TIFF
2024158198000010.tif
18
89
数9左辺の正方行列の逆行列を両辺にかければ数3のコントローラパラメータKが求まり、数10の数値例では数11となる。この場合の応答を図2に示す。時刻L
2
後に数1のすべての極が極零消去されるので、L
2
が整定時間となる。L
2
の値は設計者が選べるが、早く整定させればその分制御入力は大きくなる。
TIFF
2024158198000011.tif
4
100
TIFF
2024158198000012.tif
4
99
【先行技術文献】
【特許文献】
【0004】
O.J.M. Smith, Dead Beat Response, Resonant Load, Control System and Method, US Patent 3051883, Aug.28, 1962
【非特許文献】
【0005】
O.J.M. Smith, Posicast Control of Damped Oscillatory Systems, Proceedings of the IRE, pp.1249-1255, 1957
【発明の開示】
【発明が解決しようとする課題】
【0006】
ポジカスト制御はモデルベース制御であり、設計には制御対象のモデルが必要である。本発明は、制御対象の応答データからポジカストコントローラのパラメータを定め、制振制御を行うモデルフリーな方式を提供する。
【課題を解決するための手段】
【0007】
制御対象は次数のみ既知とし、それ以外は上記と同じ設定で本発明の方式を説明する。まず数12のステップ信号で制御対象のステップ応答を測定し、Y
S
で表す(図3上段)。ここでステップ信号の高さcは、状況に応じた値を選んでよい。
TIFF
2024158198000013.tif
8
16
数12を数3のポジカストコントローラに通すと(図3下段)、時間領域では数13の信号となる。
TIFF
2024158198000014.tif
4
72
重ね合わせの原理より、数13に対する線形制御対象の応答も数14の線形結合で表される。
TIFF
2024158198000015.tif
4
74
時不変な制御対象では、y
S
(t - L
1
)とy
S
(t - L
2
)は、数12のステップ信号に対する応答y
S
(t)を単に時間的に平行移動すればよい。ここで想定した役割を数14が果たすのは時刻L
2
以降である。言い換えると、出力yが目標値に一致するのは時刻L
2
以降である。したがってデータを時刻L
2
以降のものに限定した数15の回帰モデルを考える。
TIFF
2024158198000016.tif
13
87
【0008】
データペアがN個あるとき、数16の評価関数を最小にするパラメータKの最小2乗推定値は、数17を数18で表すとき、数19で与えられる。ただしA
+
はAの疑似逆行列である。
TIFF
2024158198000017.tif
13
54
TIFF
2024158198000018.tif
18
123
TIFF
2024158198000019.tif
7
21
TIFF
2024158198000020.tif
5
47
【0009】
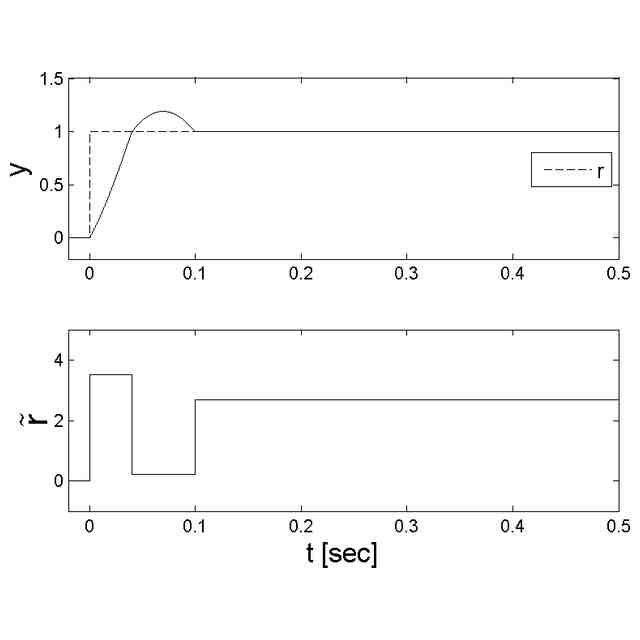
数1のステップ応答のシミュレーションデータを図4上段に示す。t= 0.1(数3のポジカストコントローラに設定した整定時間L
2
)以降のデータを、Δt= 0.0001の間隔で20点取り、数19に用いた結果が数20である。ここではシミュレーションデータの誤差が元々小さいため、モデルベースの数11の値にほとんど一致している。
TIFF
2024158198000021.tif
5
99
このときの応答を図5に示す。ポジカストコントローラに設定した整定時間以降の応答データをもとに制振制御が行えることがシミュレーションからも確認できる。
【0010】
ステップ目標値の代わりにS次目標値(台形信号の積分)を用いることもできる。S次目標値r
C
に対する数1の応答データy
C
を図4下段に示す。この場合は、数17のr
S
,y
S
をr
C
,y
C
に置き換え、さらにS次目標値の整定時間T
S
の遅れも加えた数21を用いる。
TIFF
2024158198000022.tif
13
131
数21を用いた場合の応答例を図6に示す。L
2
+ T
S
= 0.1 + 0.1 [sec]が整定時間となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
16日前
和研工業株式会社
多連レバー機構
29日前
スター精密株式会社
工作機械
1か月前
株式会社クボタ
作業車
19日前
株式会社ダイフク
搬送車
19日前
ローム株式会社
半導体集積回路
24日前
エイブリック株式会社
ボルテージレギュレータ
16日前
トヨタ自動車株式会社
工作機械の制御装置
18日前
トヨタ自動車株式会社
工作機械の制御装置
17日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
株式会社やまびこ
走行制御装置
4日前
株式会社ダイフク
物品搬送設備
17日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御装置および制御方法
1か月前
チームラボ株式会社
走行システム及び走行路
1か月前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
株式会社デンソー
診断装置
2日前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
井関農機株式会社
作業車両
12日前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
22日前
ローム株式会社
バイアス回路
18日前
オルガノ株式会社
運転管理方法及び運転管理装置
19日前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































