TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024153247
公報種別
公開特許公報(A)
公開日
2024-10-29
出願番号
2023067021
出願日
2023-04-17
発明の名称
ロボットシステム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G05D
1/43 20240101AFI20241022BHJP(制御;調整)
要約
【課題】適切に充電を行うことができるロボットシステムを提供する。
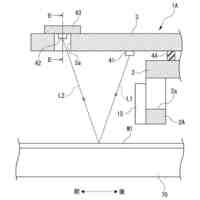
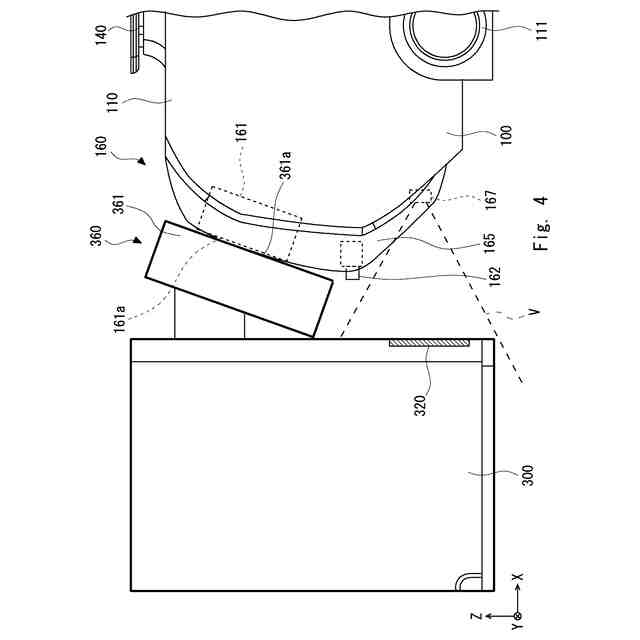
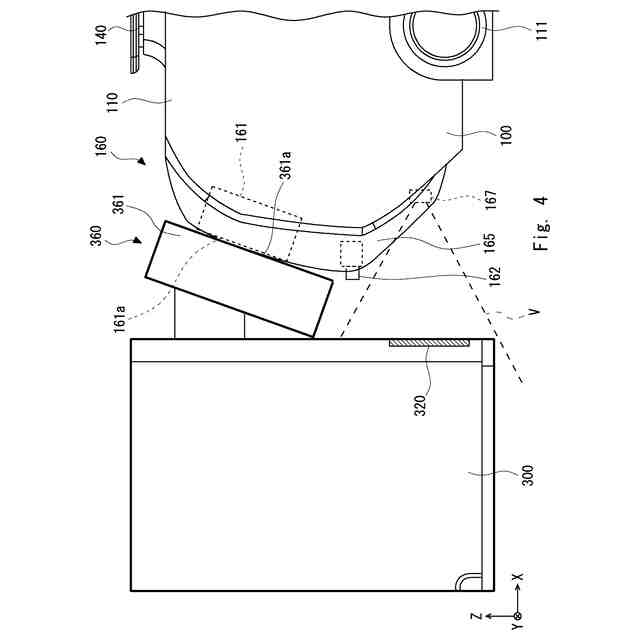
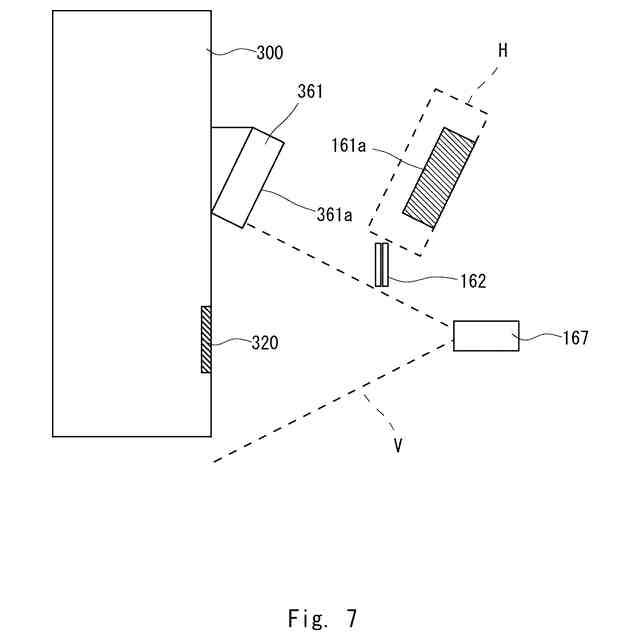
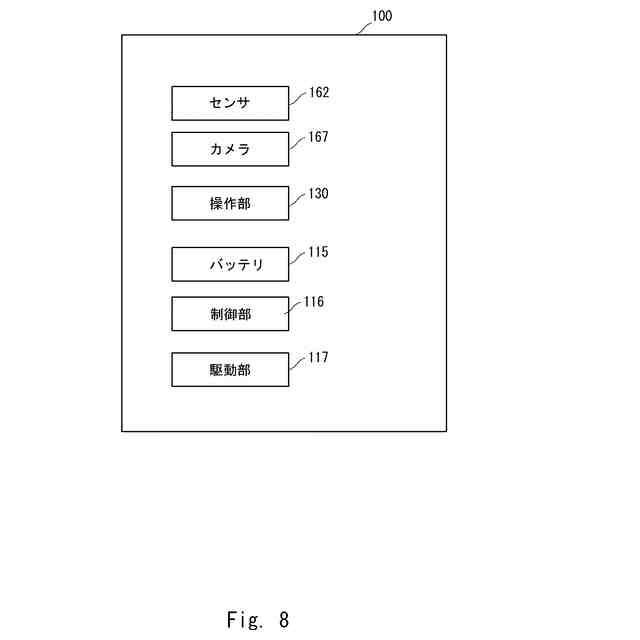
【解決手段】本実施形態にかかるロボットシステムは、受電パッド161を有する移動ロボット100と、送電パッド361を備えた充電器300と、を備えたロボットシステムであって、移動ロボット100は、上下方向において受電パッド161からずれた位置に配置され、周辺物体を検知するセンサ162を備え、受電パッド161が、センサ162側に突出するように、上下方向に傾斜して設けられており、送電パッド361が受電パッド161と対向するように、上下方向に傾斜して設けられており、センサ162の先端が、受電パッド161の先端よりも外側に配置されている。移動ロボット100は、機械学習モデルを用いてもよい。
【選択図】図4
特許請求の範囲
【請求項1】
充電器の送電パッドから電力供給を受ける受電パッドを有する移動ロボットを備えたロボットシステムであって、
前記移動ロボットは、上下方向において前記受電パッドからずれた位置に配置され、周辺物体を検知するセンサを備え、
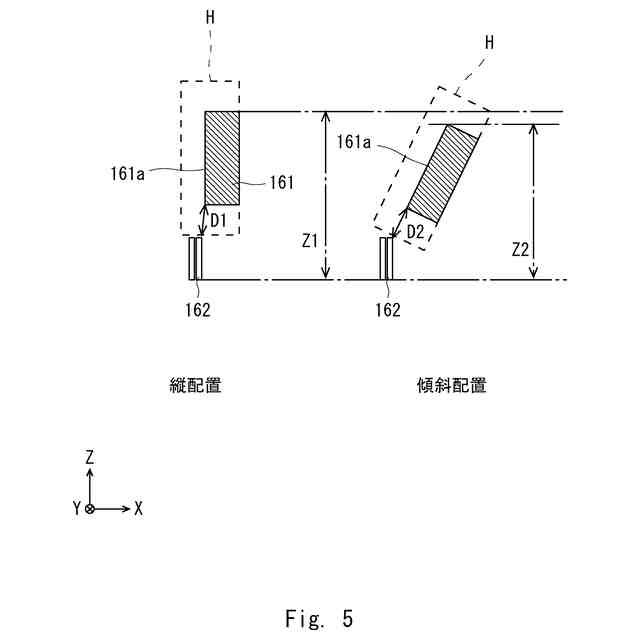
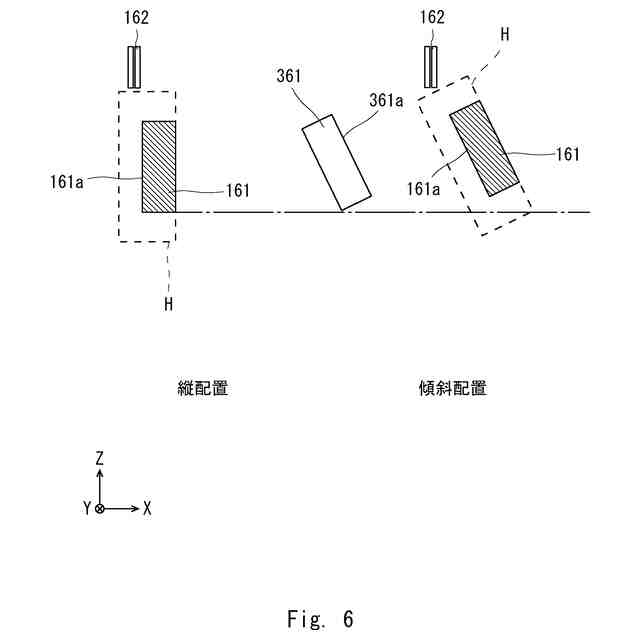
前記受電パッドが、前記センサ側に突出するように、上下方向に傾斜して設けられており、
前記送電パッドが前記受電パッドと対向するように、上下方向に傾斜して設けられており、
上面視において、前記送電パッドに向かう側の前記センサの先端が、前記受電パッドの先端よりも外側に配置されているロボットシステム。
続きを表示(約 470 文字)
【請求項2】
前記移動ロボットが撮像装置を備え、
上下方向において、前記撮像装置と前記受電パッドとの間に、前記センサが配置されている請求項1に記載のロボットシステム。
【請求項3】
前記充電器には、前記撮像装置で撮像されるラベルが設けられ、
前記ラベルの撮像画像に基づいて、前記移動ロボットが後方に走行することで、前記移動ロボットが充電機器に近づいていく請求項2に記載のロボットシステム。
【請求項4】
前記センサが、前記撮像装置の画角から外れていた位置に配置されている請求項2、又は3に記載のロボットシステム。
【請求項5】
前記受電パッドが前記移動ロボットの移動方向の後方側に設けられている請求項2、又は3に記載のロボットシステム。
【請求項6】
前記受電パッド及び前記送電パッドが非接触充電を行う請求項1、又は2に記載のロボットシステム。
【請求項7】
前記充電器をさらに備えた請求項1、又は2を備えたロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステムに関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
特許文献1には、円柱形状のロボットを充電する非接触給電装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-37435号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような移動ロボットでは、周辺物体との接触を検知するための接触センサが設けられることがある。接触センサが周辺物体との接触を検知すると、移動ロボットが停止又は減速する。このようなセンサは、移動ロボットの最も外側に配置されることがある。従って、移動ロボットが充電器と接近していく場合において、センサが充電器と接触してしまうと、移動ロボットが停止してしまうという問題がある。
【課題を解決するための手段】
【0005】
本実施形態にかかるロボットシステムは、充電器の送電パッドから電力供給を受ける受電パッドを有する移動ロボットを備えたロボットシステムであって、前記移動ロボットは、上下方向において前記受電パッドからずれた位置に配置され、周辺物体を検知するセンサを備え、前記受電パッドが、前記センサ側に突出するように、上下方向に傾斜して設けられており、前記送電パッドが前記受電パッドと対向するように、上下方向に傾斜して設けられており、上面視において、前記送電パッドに向かう側の前記センサの先端が、前記受電パッドの先端よりも外側に配置されている。
【0006】
上記のロボットシステムは、前記移動ロボットが撮像装置を備え、上下方向において、前記撮像装置と前記受電パッドとの間に、前記センサが配置されていてもよい。
【0007】
上記のロボットシステムにおいて、前記充電器には、前記撮像装置で撮像されるラベルが設けられ、前記ラベルの撮像画像に基づいて、前記移動ロボットが後方に走行することで、前記移動ロボットが充電機器に近づいていくようにしてもよい
【0008】
上記のロボットシステムにおいて、前記センサが、前記撮像装置の画角から外れていた位置に配置されていてもよい。
【0009】
上記のロボットシステムにおいて、前記受電パッドが前記移動ロボットの移動方向の後方側に設けられていてもよい。
【0010】
上記のロボットシステムにおいて、前記受電パッド及び前記送電パッドが非接触充電を行うようにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
1か月前
アズビル株式会社
制御装置
1か月前
村田機械株式会社
産業機械
1か月前
コフロック株式会社
流量制御装置
1か月前
トヨタ自動車株式会社
自律移動体
1か月前
スター精密株式会社
工作機械
今日
株式会社クボタ
作業車
1か月前
株式会社丸和製作所
入力機器
1か月前
株式会社明電舎
車両
1か月前
株式会社フジキン
流量制御装置
1か月前
株式会社豊田自動織機
荷役車両
26日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
トヨタ自動車株式会社
ロボットシステム
2か月前
株式会社シンテックホズミ
搬送ロボット
15日前
株式会社村田製作所
温度補償回路
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
19日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
キヤノン株式会社
情報処理装置
2か月前
国立大学法人広島大学
モデル誤差抑制補償器
5日前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
旭精機工業株式会社
監視データ処理装置
1か月前
トヨタ自動車株式会社
自律走行装置
5日前
ブラザー工業株式会社
数値制御装置及び工作機械
1か月前
ローム株式会社
半導体装置
5日前
株式会社ディスコ
搬送車
2か月前
ミツミ電機株式会社
電源回路及びその起動方法
5日前
日本精工株式会社
制御システムおよび制御方法
5日前
ローム株式会社
定電圧生成回路
19日前
ブラザー工業株式会社
調整方法及び数値制御装置
27日前
ローム株式会社
定電圧生成回路
1か月前
ローム株式会社
定電圧生成回路
1か月前
株式会社FUJI
工作機械
1か月前
株式会社マキタ
作業ロボット
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ