TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024148638
公報種別
公開特許公報(A)
公開日
2024-10-18
出願番号
2023061957
出願日
2023-04-06
発明の名称
移動体制御システム
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
G05D
1/43 20240101AFI20241010BHJP(制御;調整)
要約
【課題】移動体とマーカーとの位置関係を精度良く推定すること。
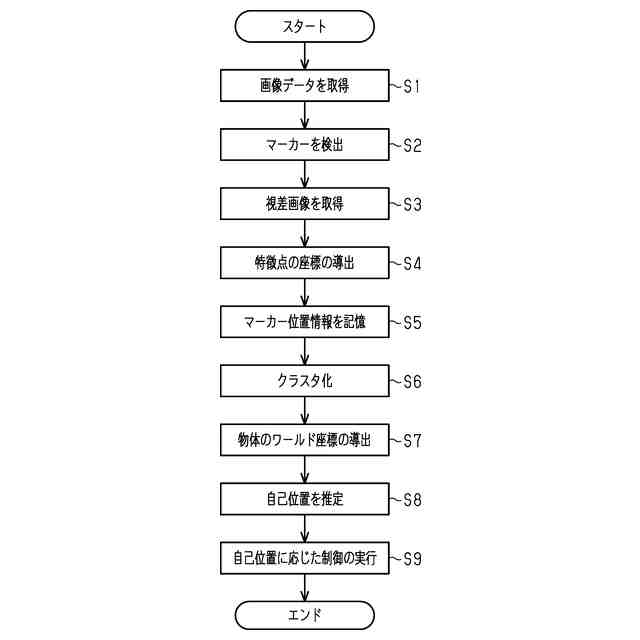
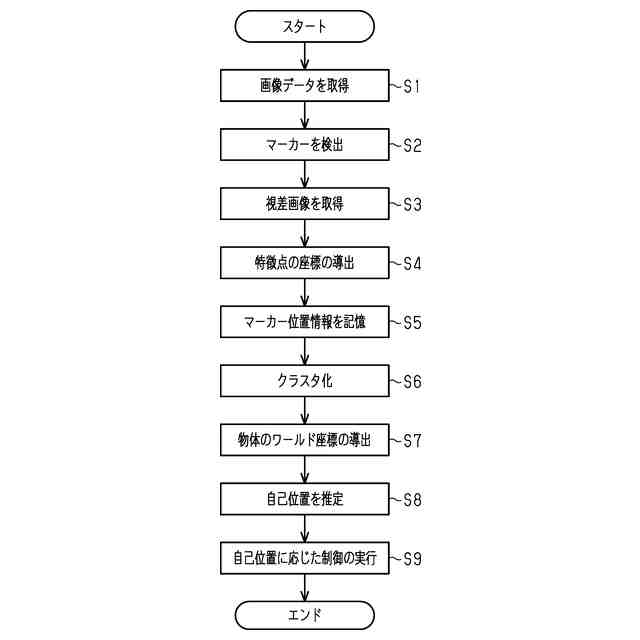
【解決手段】移動体制御システムは、撮像装置と、制御部と、を備える。撮像装置は、ステレオカメラである。制御部は、撮像装置から画像データを取得する。制御部は、画像データからマーカーを検出する。制御部は、マーカーに基づく移動体とマーカーとの位置関係から移動環境における移動体の位置を推定する。制御部は、移動体の位置に基づく制御を実行する。
【選択図】図5
特許請求の範囲
【請求項1】
移動体に取り付けられた撮像装置であって前記移動体の移動環境に配置されたマーカーを撮像するように構成された撮像装置と、
制御部と、を有し、
前記撮像装置は、ステレオカメラであり、
前記制御部は、
前記撮像装置から画像データを取得し、
前記画像データから前記マーカーを検出し、
前記マーカーに基づく前記移動体と前記マーカーとの位置関係から前記移動環境における前記移動体の位置を推定し、
前記位置に基づく制御を実行する、移動体制御システム。
続きを表示(約 640 文字)
【請求項2】
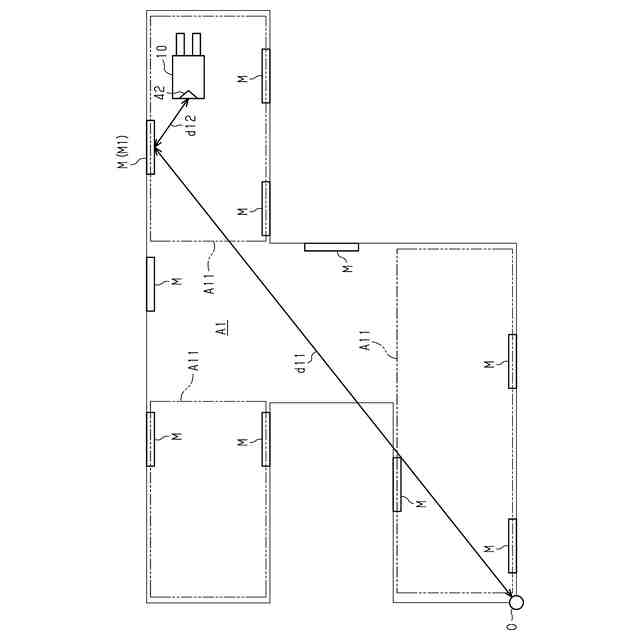
前記マーカーは、前記移動環境における前記マーカーの絶対位置を規定するものであり、
前記制御部は、
前記マーカーから前記絶対位置を取得し、
前記マーカーと前記移動体との相対位置を取得し、
前記絶対位置と前記相対位置から前記移動体の前記移動環境における絶対位置を導出する、請求項1に記載の移動体制御システム。
【請求項3】
前記ステレオカメラは、
第1カメラと、
第2カメラと、を備え、
前記画像データは、
前記第1カメラの撮像によって得られた基準画像と、
前記第2カメラの撮像によって得られた比較画像と、を含み、
前記制御部は、
前記基準画像のピクセルに対して視差を対応付け、
前記マーカーの対象部位が写っている前記ピクセルから前記撮像装置と前記マーカーとの位置関係を導出する、請求項1に記載の移動体制御システム。
【請求項4】
前記ステレオカメラは、
第1カメラと、
第2カメラと、を備え、
前記画像データは、
前記第1カメラの撮像によって得られた基準画像と、
前記第2カメラの撮像によって得られた比較画像と、を含み、
前記制御部は、
前記基準画像から前記マーカーの検出を行い、
前記基準画像のピクセルに対して視差を対応付ける、請求項1に記載の移動体制御システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体制御システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1に開示の携帯端末は、撮像装置を備える。撮像装置は、マーカーを撮像する。携帯端末は、マーカーが写る画像データから自己位置を推定する。携帯端末は、作業者が所持する端末である。
【先行技術文献】
【特許文献】
【0003】
特開2020-80147号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
移動体に撮像装置及び制御部を設けて移動体とマーカーとの位置関係を導出する場合がある。移動体に撮像装置を設けた場合、移動体の移動、移動体から撮像装置に加わる振動、及び撮像装置の取付位置の制約の少なくとも1つを原因として画像データに写るマーカーに歪みが生じる場合がある。この場合、制御部は、移動体とマーカーとの位置関係を精度良く認識できない場合がある。そして、移動体とマーカーとの位置関係を精度良く認識できない場合、移動体を適切に制御できない場合がある。例えば、マーカーを用いて移動体の自己位置を推定する場合、制御部は、撮像装置によってマーカーを撮像することで得られた画像データを取得する。マーカーには、マーカーの絶対位置が紐付けられている。制御部は、マーカーを読み取ることでマーカーの絶対位置を取得する。制御部は、画像データから移動体とマーカーとの相対位置を算出する。制御部は、マーカーの絶対位置と移動体とマーカーとの相対位置から移動体の自己位置を推定する。この際、移動体とマーカーとの相対位置を精度良く認識できない場合、自己位置の推定精度が低くなる。
【課題を解決するための手段】
【0005】
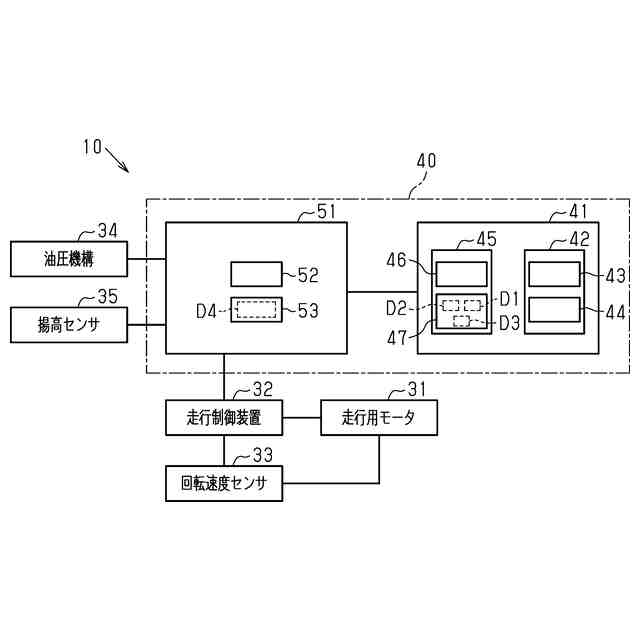
上記課題を解決する移動体制御システムは、移動体に取り付けられた撮像装置であって前記移動体の移動環境に配置されたマーカーを撮像するように構成された撮像装置と、制御部と、を有し、前記撮像装置は、ステレオカメラであり、前記制御部は、前記撮像装置から画像データを取得し、前記画像データから前記マーカーを検出し、前記マーカーに基づく前記移動体と前記マーカーとの位置関係から前記移動環境における前記移動体の位置を推定し、前記位置に基づく制御を実行する。
【0006】
制御部は、撮像装置によって撮像された画像データからマーカーを検出する。撮像装置は、ステレオカメラであるため、移動体とマーカーとの位置関係を精度良く推定することができる。
【0007】
上記移動体制御システムについて、前記マーカーは、前記移動環境における前記マーカーの絶対位置を規定するものであり、前記制御部は、前記マーカーから前記絶対位置を取得し、前記マーカーと前記移動体との相対位置を取得し、前記絶対位置と前記相対位置から前記移動体の前記移動環境における絶対位置を導出してもよい。
【0008】
上記移動体制御システムについて、前記ステレオカメラは、第1カメラと、第2カメラと、を備え、前記画像データは、前記第1カメラの撮像によって得られた基準画像と、前記第2カメラの撮像によって得られた比較画像と、を含み、前記制御部は、前記基準画像のピクセルに対して視差を対応付け、前記マーカーの対象部位が写っている前記ピクセルから前記撮像装置と前記マーカーとの位置関係を導出してもよい。
【0009】
上記移動体制御システムについて、前記ステレオカメラは、第1カメラと、第2カメラと、を備え、前記画像データは、前記第1カメラの撮像によって得られた基準画像と、前記第2カメラの撮像によって得られた比較画像と、を含み、前記制御部は、前記基準画像から前記マーカーの検出を行い、前記基準画像のピクセルに対して視差を対応付けてもよい。
【発明の効果】
【0010】
本発明によれば、移動体とマーカーとの位置関係を精度良く推定することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
16日前
和研工業株式会社
多連レバー機構
29日前
スター精密株式会社
工作機械
1か月前
株式会社クボタ
作業車
19日前
ローム株式会社
半導体集積回路
24日前
株式会社ダイフク
搬送車
19日前
エイブリック株式会社
ボルテージレギュレータ
16日前
トヨタ自動車株式会社
工作機械の制御装置
18日前
トヨタ自動車株式会社
工作機械の制御装置
17日前
株式会社やまびこ
走行制御装置
4日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
株式会社ダイフク
物品搬送設備
17日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御装置および制御方法
1か月前
トヨタ自動車株式会社
自律走行装置
1か月前
株式会社ダイヘン
搬送車
16日前
チームラボ株式会社
走行システム及び走行路
1か月前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
井関農機株式会社
作業車両
12日前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
ローム株式会社
半導体装置
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
株式会社デンソー
診断装置
2日前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
ミツミ電機株式会社
電源回路及びその起動方法
1か月前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































