TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024152392
公報種別
公開特許公報(A)
公開日
2024-10-25
出願番号
2023066555
出願日
2023-04-14
発明の名称
ピッキング条件決定システム
出願人
株式会社FUJI
代理人
弁理士法人アイテック国際特許事務所
主分類
B25J
13/08 20060101AFI20241018BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ピッキング条件をより簡単に設定できるようにする。
【解決手段】ピッキング条件決定システムは、指定のピッキングツールを使ってワークを指定のピッキング位置でピッキングするピッキングロボットに適用され、ピッキングツールの種別とピッキング位置とを含むピッキング条件を決定するピッキング条件決定システムであって、撮像範囲に含まれる対象物の三次元画像を撮像可能な撮像部と、撮像範囲に作業者の手指とワークとが含まれた状態で撮像部により撮像された画像から手指を認識する認識処理を実行する認識部と、認識した手指のジェスチャに基づいてワークのピッキング条件を決定する決定部と、を備える。
【選択図】図7
特許請求の範囲
【請求項1】
指定のピッキングツールを使ってワークを指定のピッキング位置でピッキングするピッキングロボットに適用され、前記ピッキングツールの種別と前記ピッキング位置とを含むピッキング条件を決定するピッキング条件決定システムであって、
撮像範囲に含まれる対象物の三次元画像を撮像可能な撮像部と、
前記撮像範囲に作業者の手指と前記ワークとが含まれた状態で前記撮像部により撮像された画像から前記手指を認識する認識処理を実行する認識部と、
認識した前記手指のジェスチャに基づいて前記ワークの前記ピッキング条件を決定する決定部と、
を備えるピッキング条件決定システム。
続きを表示(約 1,100 文字)
【請求項2】
指定のピッキングツールを使ってワークを指定のピッキング位置でピッキングするピッキングロボットに適用され、前記ピッキングツールの種別と前記ピッキング位置とを含むピッキング条件を決定するピッキング条件決定システムであって、
ARマーカと、
各種画像を表示可能な表示部と、
撮像範囲に含まれる対象物の三次元画像を撮像可能な撮像部と、
前記撮像範囲に作業者の手指と前記ARマーカとが含まれた状態で前記撮像部により撮像された画像に基づいて、前記手指と該ARマーカに対応するワークのARコンテンツとが含まれるAR画像を作成し、該AR画像を前記表示部に表示させる表示制御部と、
前記AR画像から前記手指を認識する認識処理を実行する認識部と、
認識した前記手指のジェスチャに基づいて前記ワークの前記ピッキング条件を決定する決定部と、
を備えるピッキング条件決定システム。
【請求項3】
請求項2に記載のピッキング条件決定システムであって、
前記表示制御部は、前記作業者の指示に応じて前記ワークの前記ARコンテンツを拡大または縮小して前記表示部に表示させる、
ピッキング条件決定システム。
【請求項4】
請求項1ないし3のいずれか1項に記載のピッキング条件決定システムであって、
前記認識部は、前記認識処理において前記ワークに対する前記指先の位置を認識し、
前記決定部は、認識した前記指先の位置を前記指定のピッキング位置に決定する、
ピッキング条件決定システム。
【請求項5】
請求項1ないし3のいずれか1項に記載のピッキング条件決定システムであって、
複数のピッキングツールをそれぞれを互いに異なる手指形状に対応付けて記憶した記憶部を備え、
前記決定部は、前記記憶部に記憶された前記複数のピッキングツールのうち前記認識部で認識した前記手指形状に対応するピッキングツールを前記指定のピッキングツールに決定する、
ピッキング条件決定システム。
【請求項6】
請求項5に記載のピッキング条件決定システムであって、
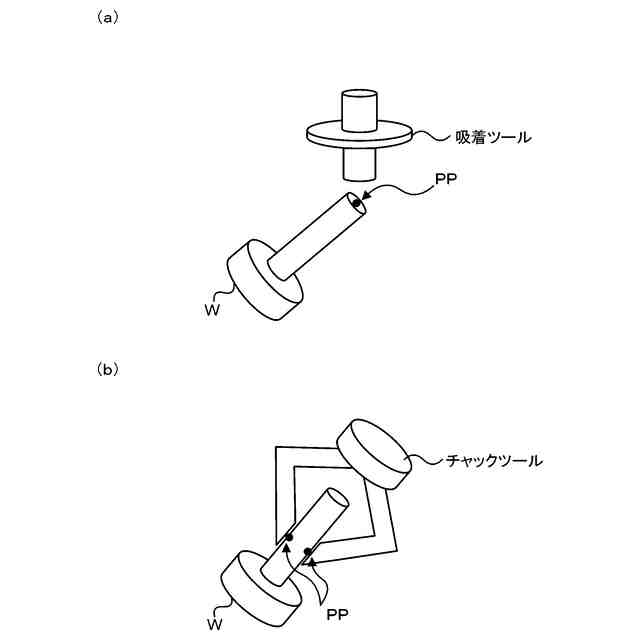
前記複数のピッキングツールには、前記ワークを把持する2つの把持爪を有するメカチャックと、前記ワークを吸着する吸着ツールとが含まれ、
前記記憶部は、前記メカチャックを前記作業者の右手または左手の人差し指と親指とで前記ワークを摘まむ手指形状に対応付けて記憶し、前記吸着ツールを前記作業者の右手または左手の人差し指で前記ワークを指さす手指形状に対応付けて記憶する、
ピッキング条件決定システム。
発明の詳細な説明
【技術分野】
【0001】
本明細書は、ピッキング条件決定システムについて開示する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、ばら積み状態で供給された同種の複数のワークを、ワークの種別に応じたピッキングツール(例えば、メカチャックや吸着ノズル)を用いてトレイ上に整列させて配置するピッキングシステムが知られている。例えば、特許文献1には、供給された同種の複数のワークの画像を撮像し、予め作成されたワーク形状モデルとのパターンマッチングによりロボットがピッキングする対象ワークを抽出し、ワークの種別毎に定められるピッキング条件にしたがって対象ワークをピッキングするロボットシステムが開示されている。ピッキング条件には、ワーク形状モデルにおけるピッキング位置や、ピッキングツールの種別に関する条件が含まれる。
【先行技術文献】
【特許文献】
【0003】
国際公開第2018/163242号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述したピッキングシステムでは、ピッキング条件を定めるに当たって、ピッキングするワークの種別ごとに、ピッキングツールの種別とピッキング位置とを、作業者が入力する必要がある。このため、多くの種類のワークに対してピッキング位置を設定する場合には、作業者には負担となる場合がある。
【0005】
本開示は、ピッキング条件をより簡単に設定できるようにすることを主目的とする。
【課題を解決するための手段】
【0006】
本開示の第1のピッキング条件決定システムは、
指定のピッキングツールを使ってワークを指定のピッキング位置でピッキングするピッキングロボットに適用され、前記ピッキングツールの種別と前記ピッキング位置とを含むピッキング条件を決定するピッキング条件決定システムであって、
撮像範囲に含まれる対象物の三次元画像を撮像可能な撮像部と、
前記撮像範囲に作業者の手指と前記ワークとが含まれた状態で前記撮像部により撮像された画像から前記手指を認識する認識処理を実行する認識部と、
認識した前記手指のジェスチャに基づいて前記ワークの前記ピッキング条件を決定する決定部と、
を備えることを要旨とする。
【0007】
この第1のピッキング条件決定システムでは、画像から確認した作業者の手指のジェスチャに基づいてワークのピッキング条件を決定する。これにより、作業者による面倒なデータの入力が必要なくなり、ピッキング条件をより簡単に設定できることができる。
【0008】
本開示の第2のピッキング条件決定システムは、
指定のピッキングツールを使ってワークを指定のピッキング位置でピッキングするピッキングロボットに適用され、前記ピッキングツールの種別と前記ピッキング位置とを含むピッキング条件を決定するピッキング条件決定システムであって、
ARマーカと、
各種画像を表示可能な表示部と、
撮像範囲に含まれる対象物の三次元画像を撮像可能な撮像部と、
前記撮像範囲に作業者の手指と前記ARマーカとが含まれた状態で前記撮像部により撮像された画像に基づいて、前記手指と該ARマーカに対応するワークのARコンテンツとが含まれるAR画像を作成し、該AR画像を前記表示部に表示させる表示制御部と、
前記AR画像から前記手指を認識する認識処理を実行する認識部と、
認識した前記手指のジェスチャに基づいて前記ワークの前記ピッキング条件を決定する決定部と、
を備えることを要旨とする。
【0009】
この第2のピッキング条件決定システムでは、本開示の第1のピッキング条件決定システムと同様の効果を奏する。また、ピッキング条件を決定するに当たり、実際にワークを用意する必要がなくなる。
【図面の簡単な説明】
【0010】
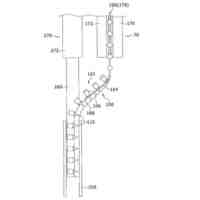
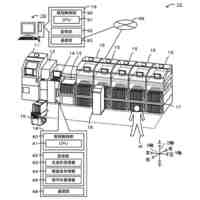
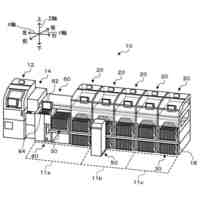
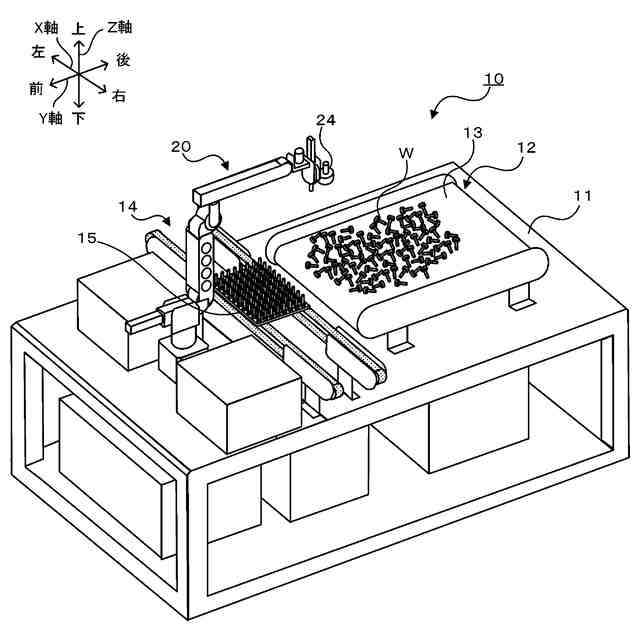
ロボットシステム10の概略構成図である。
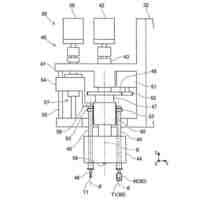
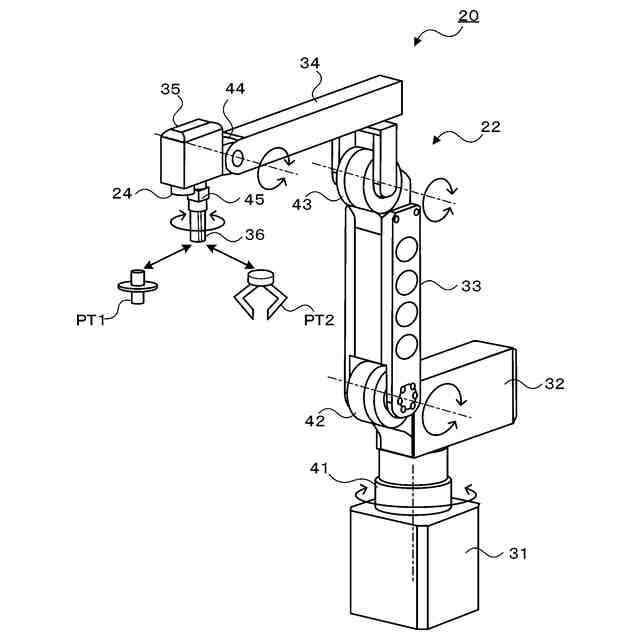
ロボット20の概略構成図である。
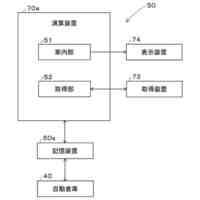
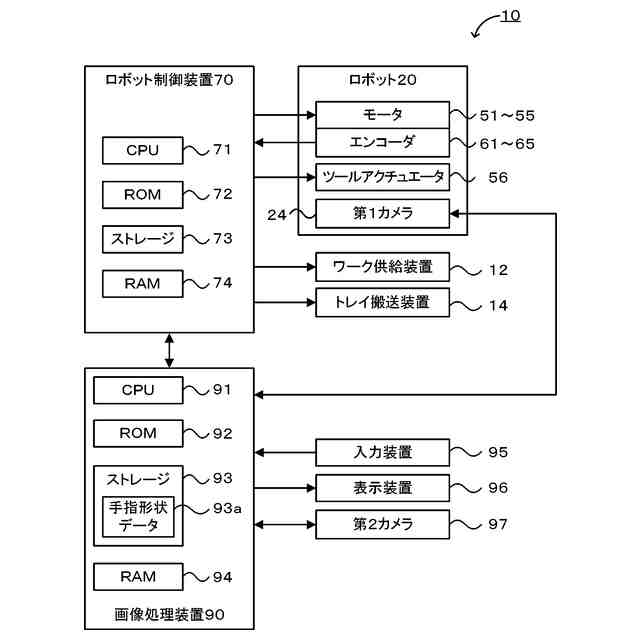
ロボットシステム10の電気的な接続関係を示すブロック図である。
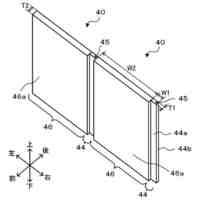
ボルト形のワークWをピッキングツールでピッキングする様子を示す説明図である。
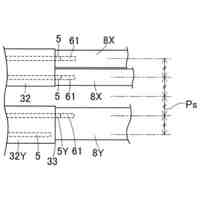
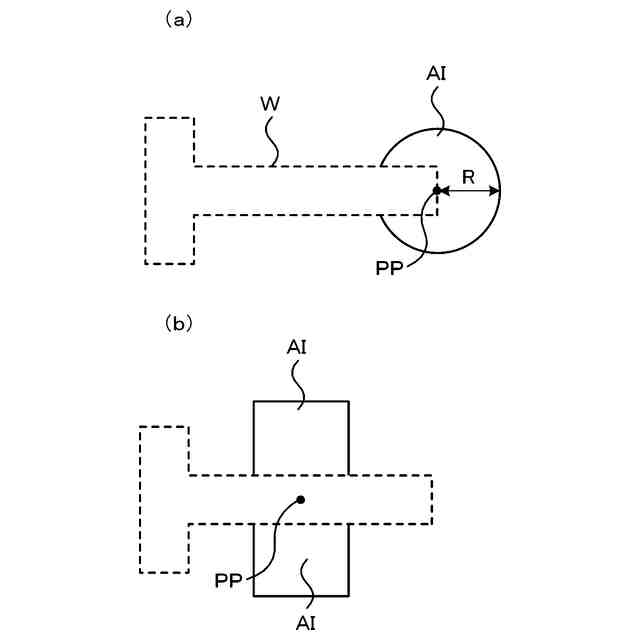
干渉チェック領域AIの説明図である。
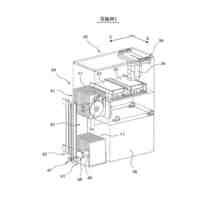
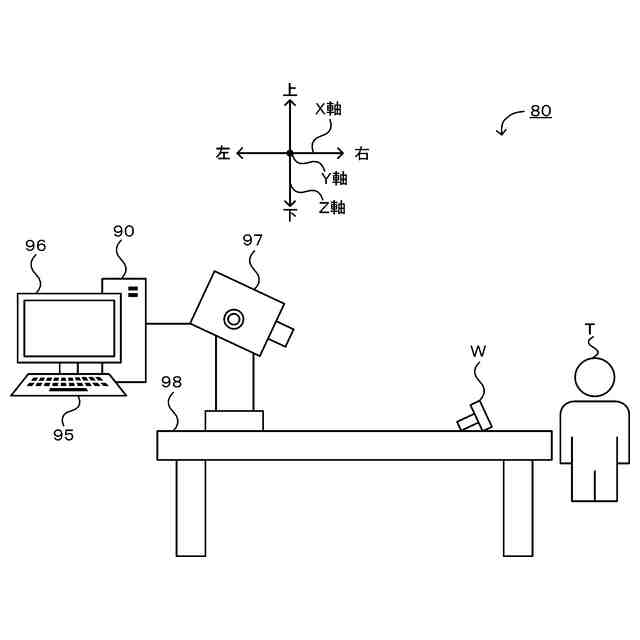
画像処理システム80の概略構成図である。
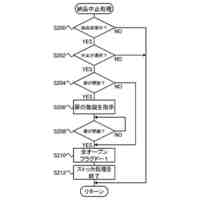
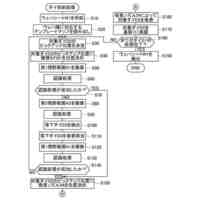
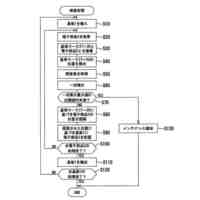
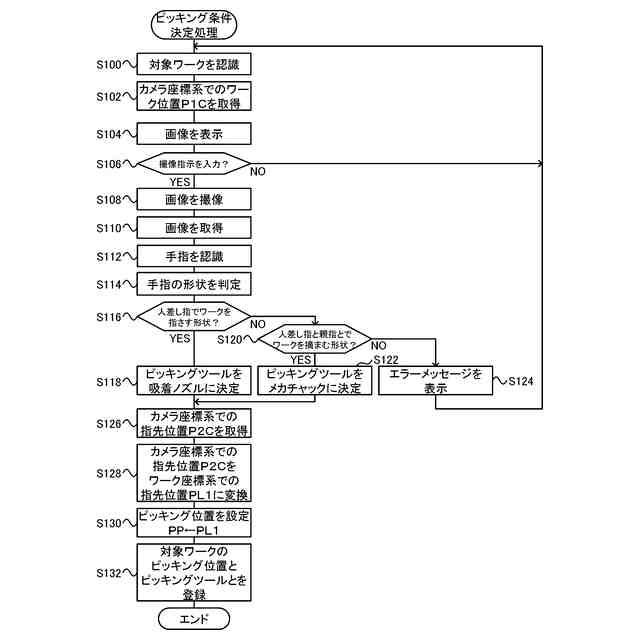
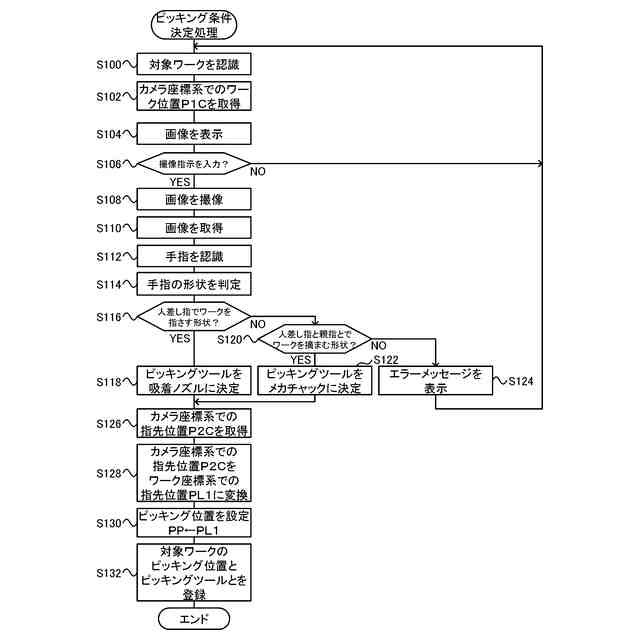
ピッキング条件決定処理の一例を示すフローチャートである。
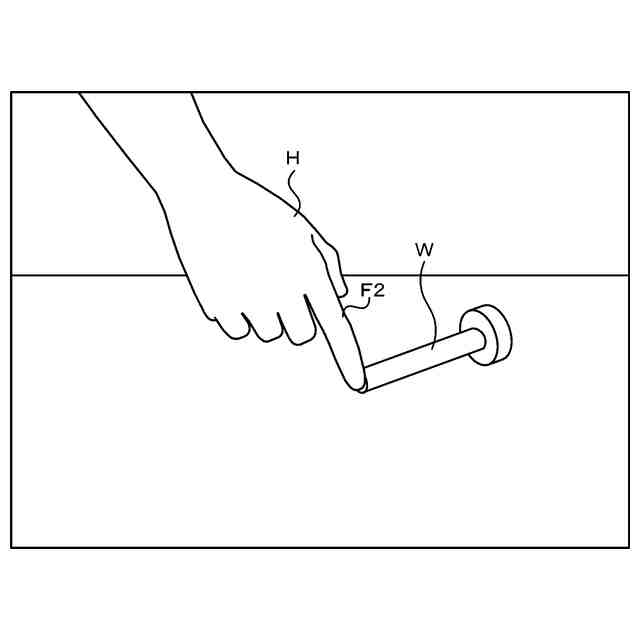
人差し指F2でワークWを指さす手指形状の説明図である。
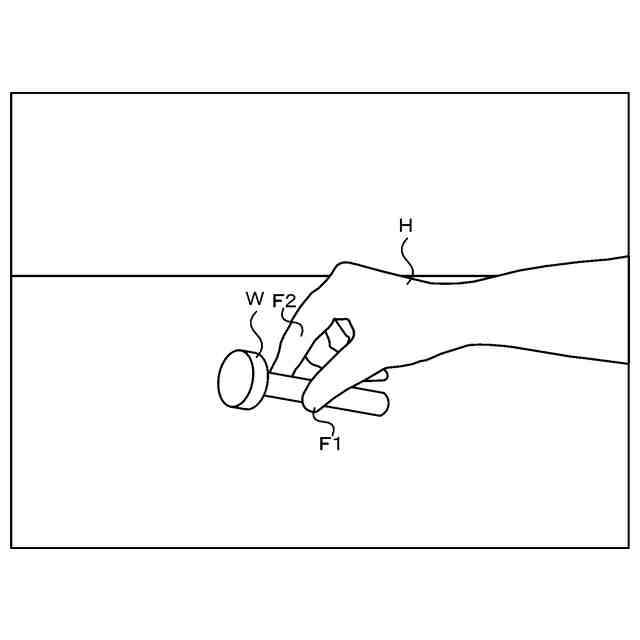
親指F1と人差し指F2とでワークWを摘まむ手指形状の説明図である。
第1変形例の画像処理システム80の一例を示す概略構成図である。
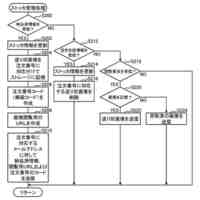
第1変形例のピッキング条件決定処理の一例を示すフローチャートである。
第2変形例の画像処理システム80の一例を示す概略構成図である。
第2変形例のピッキング条件決定処理の一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
フィーダ
2日前
株式会社FUJI
ストッカ
1か月前
株式会社FUJI
印刷装置
10日前
株式会社FUJI
テープフィーダ
1か月前
株式会社FUJI
リール回転装置
1か月前
株式会社FUJI
ストッカシステム
1か月前
株式会社FUJI
物品案内システム
4日前
株式会社FUJI
リード部品供給装置
1か月前
株式会社FUJI
加工寸法管理システム
1か月前
株式会社FUJI
納品庫およびストッカ
23日前
株式会社FUJI
工作機械の操作システム
16日前
株式会社FUJI
ロッカーおよび管理方法
1か月前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社FUJI
ピッキング条件決定システム
1か月前
株式会社FUJI
ダイ供給装置及びダイ供給方法
23日前
株式会社FUJI
リール補強部材および自動倉庫
4日前
株式会社FUJI
部品実装機および部品実装方法
10日前
株式会社FUJI
ダイ供給装置及びダイ供給方法
1か月前
株式会社FUJI
対基板作業装置及び対基板作業方法
1か月前
株式会社FUJI
保守装置、実装装置及び実装システム
16日前
株式会社FUJI
ストッカシステム、制御装置および表示方法
1か月前
株式会社FUJI
部品実装機、部品実装システムおよび部品実装方法
1か月前
株式会社FUJI
交換装置
1か月前
株式会社FUJI
部品実装機
1か月前
株式会社FUJI
貸与システム
1か月前
株式会社FUJI
テープフィーダ
10日前
株式会社FUJI
部品実装ライン
3日前
株式会社FUJI
情報処理装置、ストッカシステム、情報処理方法及びプログラム
25日前
株式会社FUJI
フィーダ、フィーダセットアップ装置およびキャリアテープ装填方法
1か月前
株式会社FUJI
フィーダ入替システム
1か月前
株式会社FUJI
フィーダ保管庫及び部品実装システム
25日前
個人
木製ハンマー
3か月前
個人
関節モジュール
3か月前
個人
寸切りボルト回し
2か月前
個人
スロットルトリガー
3か月前
中国電力株式会社
腰袋
6か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ