TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024131079
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023041121
出願日
2023-03-15
発明の名称
自律作業システム
出願人
オムロン株式会社
代理人
個人
主分類
G05D
1/43 20240101AFI20240920BHJP(制御;調整)
要約
【課題】自律作業機の作業効率を向上させる。
【解決手段】自律作業システムは、複数の自律作業機と、第1充電ステーションと、管理コンピュータとを備える。複数の自律作業機のそれぞれは、作業位置に他の自律作業機がいる場合には、第1待機位置において待機する。第1充電ステーションは、第1待機位置に配置される。第1充電ステーションは、第1待機位置において待機している自律作業機のバッテリを、ワイヤレス電力伝送により充電する。管理コンピュータは、複数の物品のそれぞれの重量と、複数の物品のそれぞれの保管場所と作業位置との間の距離とを取得する。管理コンピュータは、複数の自律作業機のそれぞれのバッテリの充電残量を取得する。管理コンピュータは、複数の物品のそれぞれの重量と距離と、複数の自律作業機のそれぞれのバッテリの充電残量とに基づいて、複数の物品から、複数の自律作業機のそれぞれに割り当てる物品を決定する。
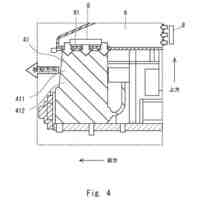
【選択図】図4
特許請求の範囲
【請求項1】
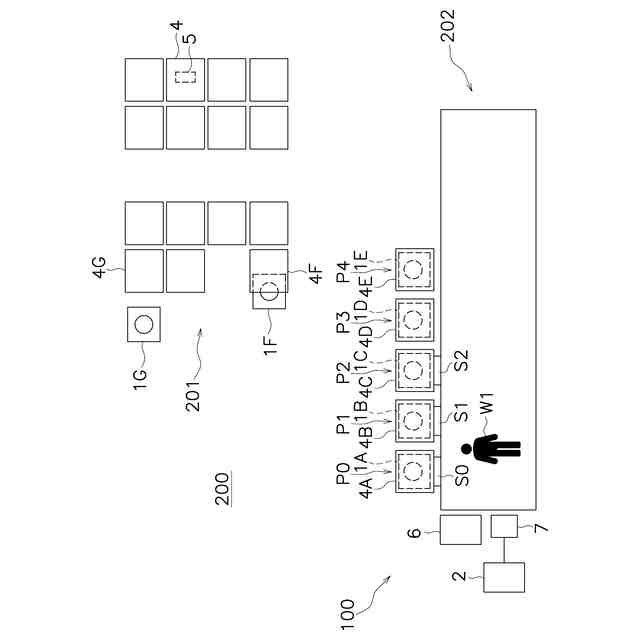
バッテリを含み、複数の物品を、前記複数の物品のそれぞれの保管場所と、所定の作業を行うための作業位置との間でそれぞれ搬送し、前記作業位置に他の自律作業機がいる場合には、第1待機位置において待機する複数の自律作業機と、
前記第1待機位置に配置され、前記第1待機位置において待機している前記自律作業機の前記バッテリを、ワイヤレス電力伝送により充電する第1充電ステーションと、
管理コンピュータと、
を備え、
前記管理コンピュータは、
前記複数の物品のそれぞれの重量と、前記複数の物品のそれぞれの前記保管場所と前記作業位置との間の距離とを取得し、
前記複数の自律作業機のそれぞれの前記バッテリの充電残量を取得し、
前記複数の物品のそれぞれの前記重量と前記距離と、前記複数の自律作業機のそれぞれの前記バッテリの充電残量とに基づいて、前記複数の物品から、前記複数の自律作業機のそれぞれに割り当てる物品を決定する、
自律作業システム。
続きを表示(約 1,400 文字)
【請求項2】
前記管理コンピュータは、
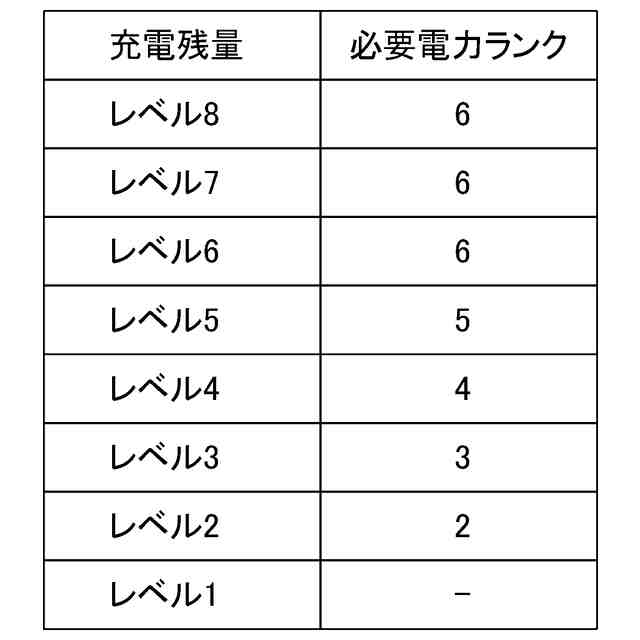
前記複数の物品のそれぞれの前記距離と前記重量とに基づいて、前記複数の物品のそれぞれの搬送に必要な電力量を示す必要電力ランクを決定し、
前記複数の物品のそれぞれの前記必要電力ランクと、記複数の自律作業機のそれぞれの前記バッテリの充電残量とに基づいて、前記複数の物品から、前記複数の自律作業機のそれぞれに割り当てる物品を決定する、
請求項1に記載の自律作業システム。
【請求項3】
前記管理コンピュータは、
前記複数の物品のそれぞれの前記距離の大きさに応じた距離ランクを取得し、
前記複数の物品のそれぞれの前記重量の大きさに応じた重量ランクを取得し、
前記距離ランクと前記重量ランクとに基づいて、前記必要電力ランクを決定する、
請求項2に記載の自律作業システム。
【請求項4】
前記作業位置に配置され、前記所定の作業中に、前記作業位置において待機している前記自律作業機の前記バッテリを、ワイヤレス電力伝送により充電する作業充電ステーションをさらに備える、
請求項1に記載の自律作業システム。
【請求項5】
前記複数の自律作業機は、前記第1待機位置に他の自律作業機がいる場合には、第2待機位置において待機し、
前記第2待機位置に配置され、前記第2待機位置において待機している前記自律作業機の前記バッテリを、ワイヤレス電力伝送により充電する第2充電ステーションをさらに備える、
請求項1に記載の自律作業システム。
【請求項6】
前記複数の自律作業機は、第1自律作業機と第2自律作業機と第3自律作業機とを含み、
前記第2自律作業機は、前記作業位置に前記第1自律作業機がいる場合には、前記第1待機位置において待機し、
前記第1充電ステーションは、前記第1待機位置において待機している前記第2自律作業機の前記バッテリを充電し、
前記第3自律作業機は、前記第1待機位置に前記第2自律作業機がいる場合には、前記第2待機位置において待機し、
前記第2充電ステーションは、前記第2待機位置において待機している前記第3自律作業機の前記バッテリを充電する、
請求項5に記載の自律作業システム。
【請求項7】
前記第2自律作業機は、前記作業位置が空いた場合には、前記第1待機位置から前記作業位置に移動し、
前記第3自律作業機は、前記第1待機位置が空いた場合には、前記第2待機位置から前記第1待機位置に移動し、
前記第1充電ステーションは、前記第1待機位置において待機している前記第3自律作業機の前記バッテリを充電する、
請求項6に記載の自律作業システム。
【請求項8】
前記複数の自律作業機のそれぞれは、前記保管場所から、割り当てられた前記物品を前記作業位置に搬送し、前記物品のピッキングが完了するまで前記作業位置において待機する、
請求項1から7のいずれかに記載の自律作業システム。
【請求項9】
前記複数の自律作業機のそれぞれは、割り当てられた前記物品を、前記作業位置において受け取り、前記物品を前記作業位置から前記保管場所に搬送する、
請求項1から7のいずれかに記載の自律作業システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律作業システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、自律作業機を作業経路に従って自律走行させ、所定の作業位置において作業を行わせる自律作業システムが知られている。例えば、特許文献1では、自律移動ロボットを所定の作業エリア内で自律走行させる自律移動システムが開示されている。例えば、自律搬送ロボットは、所定の保管場所から所定の作業位置まで、物品を搬送する。
【先行技術文献】
【特許文献】
【0003】
特開2022-112212号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した自律作業機は、搬送途中でバッテリの残容量が少なくなった場合には、作業エリア内に配置された充電ステーションまで移動する。充電ステーションは、自律作業機のバッテリを充電する。充電ステーションは、作業位置及び保管場所から離れた場所にある。そのため、自律作業機が充電ステーションまで移動するために時間がかかる。また、充電ステーションは、接点方式であるため、自律作業機の位置合わせにも時間がかかる。さらに、自律作業機が充電ステーションにおいて充電している間は、自律作業機は作業を行うことができない。そのため、作業効率が低下する。本発明の目的は、自律作業機の作業効率を向上させることにある。
【課題を解決するための手段】
【0005】
本発明の一態様に係る自律作業システムは、複数の自律作業機と、第1充電ステーションと、管理コンピュータとを備える。複数の自律作業機のそれぞれは、バッテリを含む。複数の自律作業機のそれぞれは、複数の物品のそれぞれの保管場所と、所定の作業を行うための作業位置との間で物品を搬送する。複数の自律作業機のそれぞれは、作業位置に他の自律作業機がいる場合には、第1待機位置において待機する。第1充電ステーションは、第1待機位置に配置される。第1充電ステーションは、第1待機位置において待機している自律作業機のバッテリを、ワイヤレス電力伝送により充電する。
【0006】
管理コンピュータは、複数の物品のそれぞれの重量と、複数の物品のそれぞれの保管場所と作業位置との間の距離とを取得する。管理コンピュータは、複数の自律作業機のそれぞれのバッテリの充電残量を取得する。管理コンピュータは、複数の物品のそれぞれの重量と距離と、複数の自律作業機のそれぞれのバッテリの充電残量とに基づいて、複数の物品から、複数の自律作業機のそれぞれに割り当てる物品を決定する。
【0007】
本態様に係る自律作業システムでは、自律作業機は、第1待機位置において待機している間に、第1充電ステーションによって充電される。そのため、自律作業機が充電ステーションまで移動するための時間が省略される。また、第1充電ステーションは、ワイヤレス電力伝送により、自律作業機を充電する。そのため、自律作業機の位置合わせのための時間が短縮される。さらに、自律作業機は、第1待機位置での待ち時間の間に充電される。そのため、作業効率が向上する。
【0008】
また、本態様に係る自律作業システムでは、複数の物品のそれぞれの保管場所と作業位置との間の距離、及び、重量と、複数の自律作業機のそれぞれのバッテリの充電残量とに基づいて、複数の自律作業機のそれぞれに割り当てられる物品が決定される。そのため、物品の搬送中にバッテリの充電残量がなくなってしまうことが抑えられる。或いは、自律作業機が、バッテリの充電のために物品の搬送を中断してしまうことが抑えられる。それにより、作業効率がさらに向上する。
【発明の効果】
【0009】
本発明によれば、自律作業機の作業効率が向上する。
【図面の簡単な説明】
【0010】
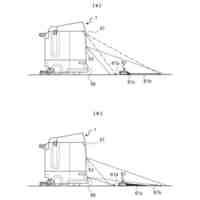
実施形態に係る自律作業システムと作業エリアとを示す平面図である。
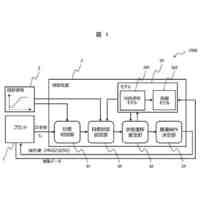
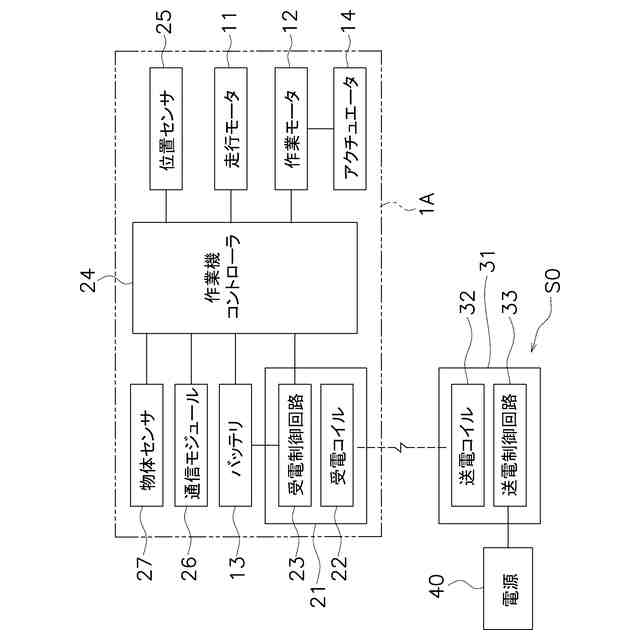
自律作業機と充電ステーションとの構成を示すブロック図である。
自律作業システムと作業エリアとを示す平面図である。
自律作業機に割り当てられる保管棚を決定するために管理コンピュータによって実行される処理を示すフローチャートである。
第1管理データの一例を示す図である。
第2管理データの一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
積水樹脂株式会社
磁性シート
1か月前
個人
車両レバー操作装置
1か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
エイブリック株式会社
基準電圧回路装置
1か月前
トヨタ自動車株式会社
搬送システム
20日前
トヨタ自動車株式会社
搬送ロボット
10日前
株式会社熊谷組
巡回ルート作成装置
1か月前
株式会社ダイヘン
電力変換装置
1か月前
株式会社ダイヘン
電力変換装置
1か月前
トヨタ自動車株式会社
ロボットシステム
20日前
株式会社栗本鐵工所
操作装置
11日前
株式会社FUJI
工作機械の操作システム
3日前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社ダイフク
物品搬送設備
20日前
株式会社栗本鐵工所
触覚提示装置
1か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
10日前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
横河電機株式会社
モジュール
1か月前
本田技研工業株式会社
運転補助装置
1か月前
トヨタ自動車株式会社
操作装置及び移動ロボット
18日前
株式会社豊田自動織機
移動体制御システム
1か月前
日本信号株式会社
自律走行ロボットシステム
1か月前
東レエンジニアリング株式会社
位置決め装置
1か月前
東レエンジニアリング株式会社
位置決め装置
1か月前
株式会社日立製作所
制御装置、制御方法
1か月前
愛知製鋼株式会社
異常検知方法及び異常検知システム
1か月前
愛知製鋼株式会社
異常検知方法及び異常検知システム
1か月前
マツダ株式会社
車両用演算装置
1か月前
ローム株式会社
カレントミラー回路
1か月前
株式会社デンソー
ペダル装置
10日前
NTN株式会社
自動搬送車の誘導システム
1か月前
株式会社NTTドコモ
総括制御装置
1か月前
トヨタ自動車株式会社
移動体及びその異物付着防止方法
20日前
オムロン株式会社
支援装置、支援方法及び支援プログラム
18日前
ローランドディー.ジー.株式会社
生産実績記録システム
18日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ