TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024140339
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023051433
出願日
2023-03-28
発明の名称
カレントミラー回路
出願人
ローム株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05F
3/26 20060101AFI20241003BHJP(制御;調整)
要約
【課題】ミラー比の設定値に対する精度が良好なカレントミラー回路を提供する。
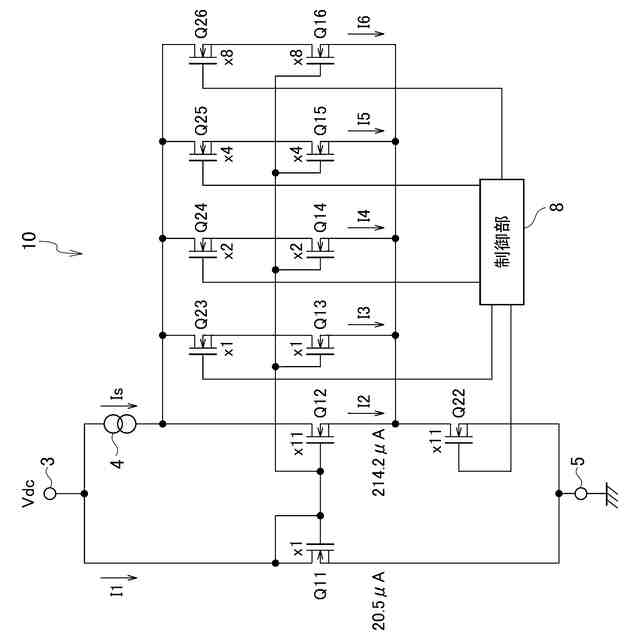
【解決手段】カレントミラー回路1は、参照電流I1を出力する第1トランジスタQ11と、第1トランジスタQ11の制御電極に制御電極が接続されている、参照電流I1に応じた第1ミラー電流I2が流れる第2トランジスタQ12および第2ミラー電流I3~I6が流れる第3トランジスタQ13~Q16と、第1~第3トランジスタQ11~Q16と直列接続されている第1~第3補助トランジスタQ31~Q36と、第1~第3補助トランジスタQ31~Q36の通電状態を制御する制御部8とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
参照電流を出力する第1トランジスタと、
前記第1トランジスタの制御電極に制御電極が接続されている、前記参照電流に応じた第1ミラー電流が流れる第2トランジスタと、
前記第1トランジスタの制御電極に制御電極が接続されている、前記参照電流に応じた第2ミラー電流が流れる第3トランジスタと、
前記第1トランジスタと直列接続されている第1補助トランジスタと、
前記第2トランジスタと直列接続されている第2補助トランジスタと、
前記第3トランジスタと直列接続されている第3補助トランジスタと、
前記第1補助トランジスタと前記第2補助トランジスタと前記第3補助トランジスタの通電状態を制御する制御部と
を備える、
カレントミラー回路。
続きを表示(約 1,000 文字)
【請求項2】
前記第1トランジスタは、第1主電極が第1端子に接続され、第2主電極が前記第1補助トランジスタの第1主電極に接続されており、
前記第2トランジスタは、第1主電極が前記第1端子に接続され、第2主電極が前記第2補助トランジスタの第1主電極に接続されており、
前記第2トランジスタは、第1主電極が前記第1端子に接続され、第2主電極が前記第2補助トランジスタの第1主電極に接続されており、
前記第3トランジスタは、第1主電極が前記第1端子に接続され、第2主電極が前記第3補助トランジスタの第1主電極に接続されており、
前記第1補助トランジスタと前記第2補助トランジスタと前記第3補助トランジスタの第2主電極が第2端子に接続されている、
請求項1に記載のカレントミラー回路。
【請求項3】
前記制御部は、
前記第1補助トランジスタをオン状態にすると共に、
前記第2補助トランジスタをオン状態にしている間は、前記第3補助トランジスタの通電状態を制御し、
前記第2補助トランジスタをオフ状態にしている間は、前記第3補助トランジスタをオフ状態に制御する、
請求項1に記載のカレントミラー回路。
【請求項4】
前記制御部は、
前記第1補助トランジスタをオン状態にすると共に、
前記第2補助トランジスタと前記第3補助トランジスタの通電状態を制御する
請求項1に記載のカレントミラー回路。
【請求項5】
前記制御部は、前記第1ミラー電流と前記第2ミラー電流を生成しないときには、前記第1補助トランジスタをオフ状態に制御する請求項1に記載のカレントミラー回路。
【請求項6】
前記第2トランジスタと前記第3トランジスタの大きさは、前記参照電流の大きさに対する前記第1ミラー電流と前記第2ミラー電流の大きさの比率に応じてそれぞれ設定されている、
請求項1から5のいずれか1項に記載のカレントミラー回路。
【請求項7】
前記第1補助トランジスタの大きさは、前記第1トランジスタと同じ大きさに設定されており、
前記第2補助トランジスタの大きさは、前記第2トランジスタと同じ大きさに設定されており、
前記第3補助トランジスタの大きさは、前記第3トランジスタと同じ大きさに設定されている、
請求項6に記載のカレントミラー回路。
発明の詳細な説明
【技術分野】
【0001】
本発明は、カレントミラー回路に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
カレントミラー回路は、例えば、過電流保護回路など、様々な回路に用いられている。
【0003】
このようなカレントミラー回路の一例として、特許文献1を挙げることができる。
【先行技術文献】
【特許文献】
【0004】
特開2019-97000号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
カレントミラー回路は、使用状況によっては、参照電流とミラー電流の比率であるミラー比が設定値よりも大きくずれてしまうことがある。
【0006】
本開示の目的は、ミラー比の設定値に対する精度が良好なカレントミラー回路を提供することにある。
【課題を解決するための手段】
【0007】
上述した課題を解決するために、本開示の一態様に係るカレントミラー回路は、参照電流を出力する第1トランジスタと、第1トランジスタの制御電極に制御電極が接続されている、参照電流に応じた第1ミラー電流が流れる第2トランジスタと、第1トランジスタの制御電極に制御電極が接続されている、参照電流に応じた第2ミラー電流が流れる第3トランジスタと、第1トランジスタと直列接続されている第1補助トランジスタと、第2トランジスタと直列接続されている第2補助トランジスタと、第3トランジスタと直列接続されている第3補助トランジスタと、第1補助トランジスタと第2補助トランジスタと第3補助トランジスタの通電状態を制御する制御部とを備える。
【発明の効果】
【0008】
本開示の一態様に係るカレントミラー回路によれば、ミラー比の設定値に対する精度が良好なカレントミラー回路を提供することができる。
【図面の簡単な説明】
【0009】
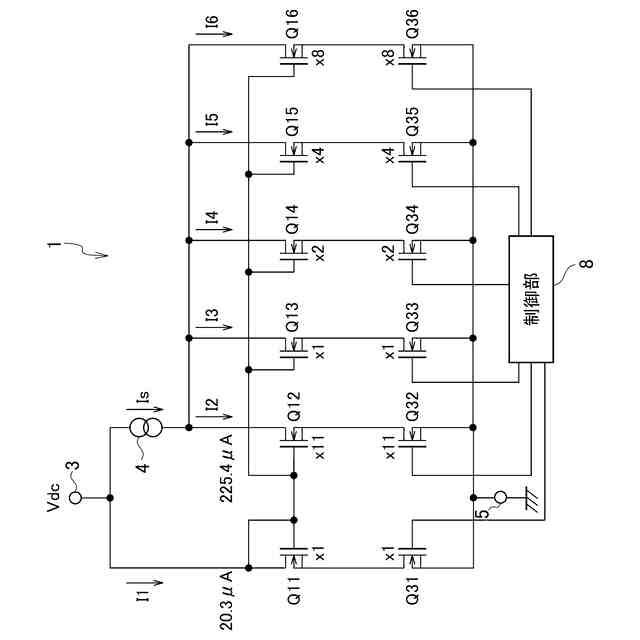
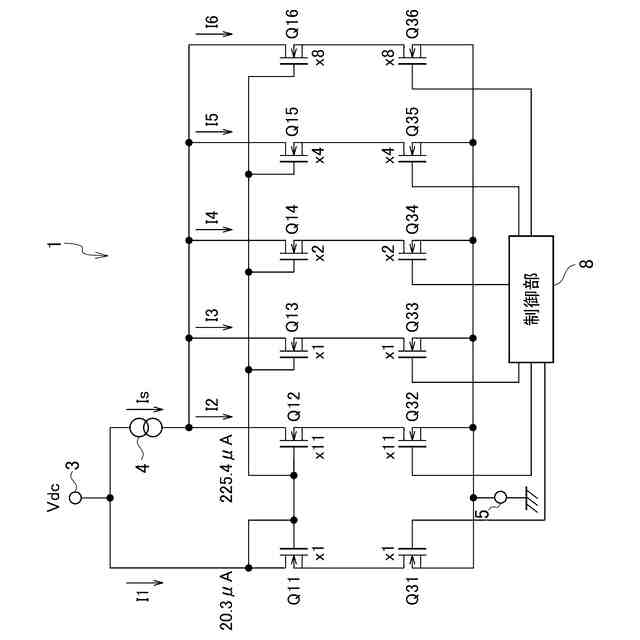
図1は、参考例に係るカレントミラー回路の一例を示す回路図である。
図2は、実施形態に係るカレントミラー回路の一例を示す回路図である。
【発明を実施するための形態】
【0010】
図面を参照して、実施形態を説明する。図面の記載において同一部分には同一符号を付して説明を省略する。なお、以下で説明する実施形態は、包括的または具体的な例を示すものである。以下の実施形態で示される数値、形状、材料、構成要素、構成要素の設置位置及び接続形態は、一例であり、本開示に限定する主旨ではない。また、以下の実施形態における構成要素のうち、最上位概念を示す独立請求項に記載されていない構成要素については、任意の構成要素として説明される。さらに、図面の寸法比率は説明の都合上誇張されており、実際の比率と異なる場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
3日前
ugo株式会社
移動体
3日前
積水樹脂株式会社
磁性シート
1か月前
個人
車両レバー操作装置
1か月前
株式会社豊田自動織機
無人走行体
1か月前
株式会社豊田自動織機
自動走行体
2か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
エイブリック株式会社
基準電圧回路装置
1か月前
トヨタ自動車株式会社
自律移動体
2日前
トヨタ自動車株式会社
搬送システム
26日前
トヨタ自動車株式会社
搬送ロボット
16日前
株式会社熊谷組
巡回ルート作成装置
1か月前
オムロン株式会社
自律作業システム
1か月前
株式会社ダイヘン
電力変換装置
1か月前
株式会社ダイヘン
電力変換装置
1か月前
エイブリック株式会社
シャントレギュレータ
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
ロボットシステム
26日前
トヨタ自動車株式会社
位置推定システム
2日前
トヨタ自動車株式会社
自律移動システム
2日前
オムロン株式会社
設計装置および設計方法
1か月前
株式会社栗本鐵工所
操作装置
17日前
株式会社FUJI
工作機械の操作システム
9日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社フカデン
外周部加工システム
2か月前
株式会社デンソー
電子制御装置
2か月前
東芝ライテック株式会社
管理システム
1か月前
株式会社ダイフク
物品搬送設備
26日前
CKD日機電装株式会社
モデルフリーポジカスト制御
16日前
アズビル株式会社
診断システムおよび診断方法
1か月前
株式会社栗本鐵工所
触覚提示装置
1か月前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
株式会社デンソー
移動体制御装置
2か月前
トヨタ自動車株式会社
操作装置及び移動ロボット
24日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































