TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024131089
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023041138
出願日
2023-03-15
発明の名称
物品搬送設備
出願人
株式会社ダイフク
代理人
弁理士法人R&C
主分類
G05D
1/43 20240101AFI20240920BHJP(制御;調整)
要約
【課題】走行経路の分岐部または合流部を含む区間における搬送車の通行を効率的に行うことにより、物品搬送設備の全体としての搬送効率を高める。
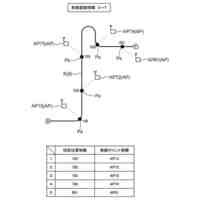
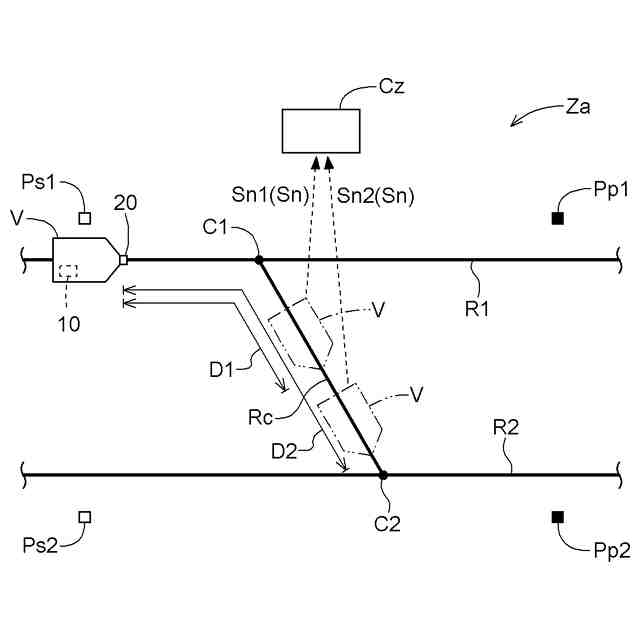
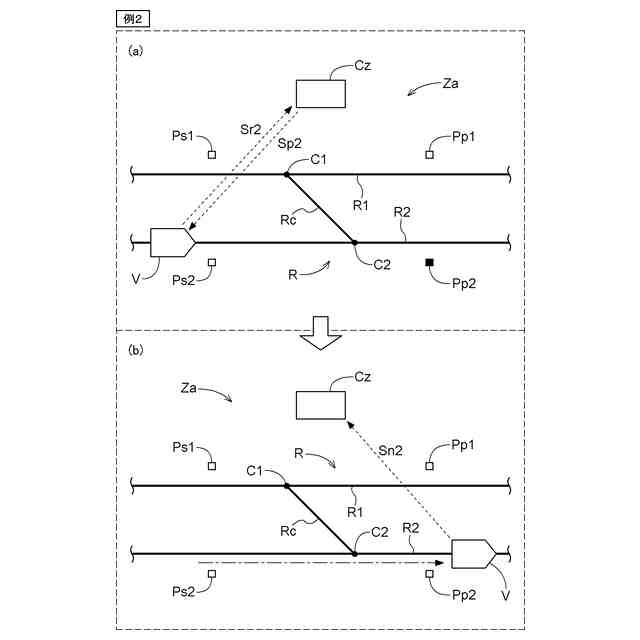
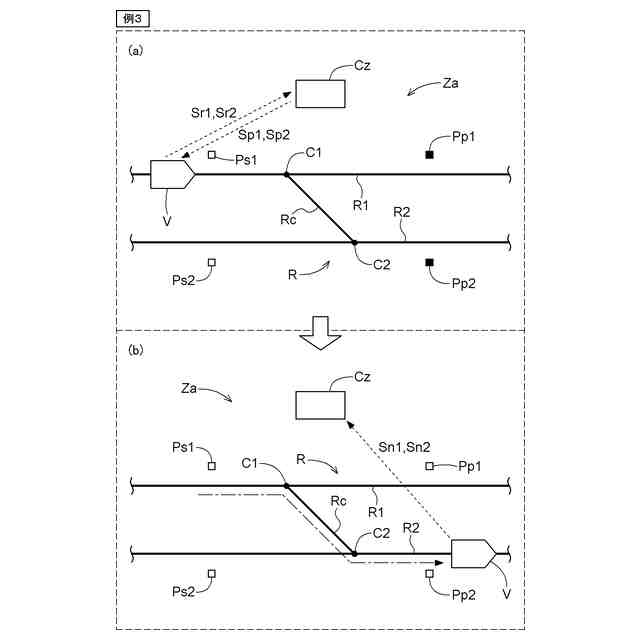
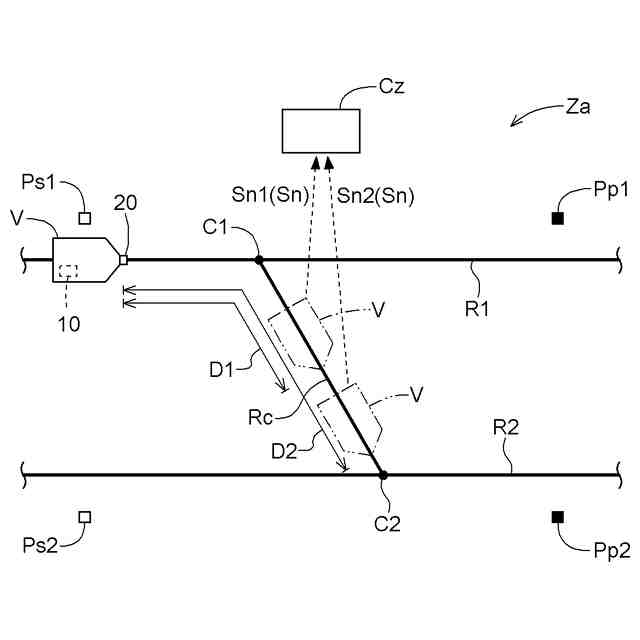
【解決手段】第1通過許可及び第2通過許可の双方を与えられて第2通過地点Pp2を通過しようとする搬送車Vは、第1停止地点Ps1からの走行距離が第1設定距離D1となった場合に第1通過地点Pp1の占有を解除する旨の第1占有解除要求Sn1を区間制御装置Czに対して行い、第1停止地点Ps1からの走行距離が第2設定距離D2となった場合に第2通過地点Pp2の占有を解除する旨の第2占有解除要求Sn2を区間制御装置Czに対して行う。
【選択図】図9
特許請求の範囲
【請求項1】
物品を搬送する搬送車と、
前記搬送車が走行する走行経路と、
前記走行経路のうちの特定の区間である特定区間を走行する前記搬送車に通過許可を与えて当該搬送車の制御を行う区間制御装置と、を備えた物品搬送設備であって、
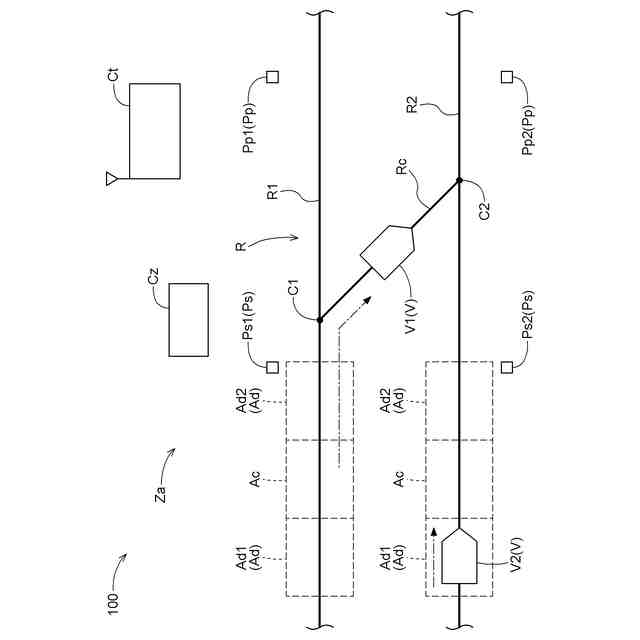
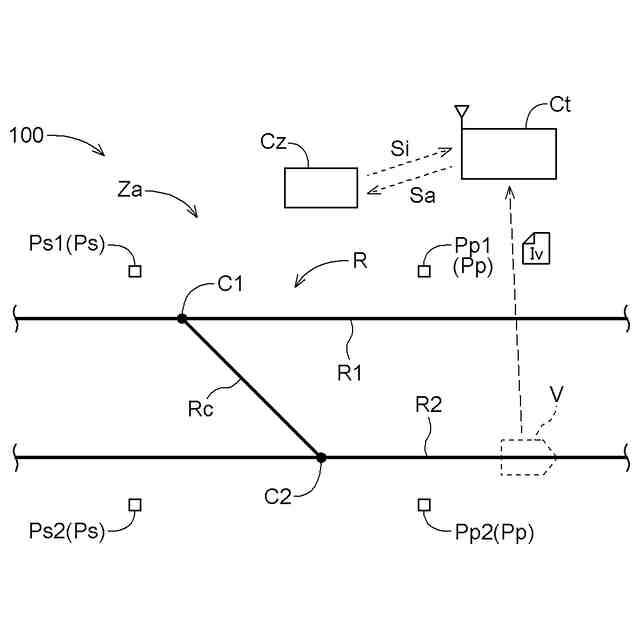
前記特定区間には、互いに交差しない第1経路及び第2経路と、前記第1経路における第1接続部と前記第2経路における第2接続部とを接続する接続経路と、が含まれ、
前記第1経路及び前記第2経路のそれぞれは、上流側から下流側へ向かって一方向に前記搬送車が走行する経路であり、
前記第1経路における前記第1接続部よりも下流側に、第1通過地点が設定され、
前記第2経路における前記第2接続部よりも下流側に、第2通過地点が設定され、
前記第1経路における前記第1接続部よりも上流側に、前記搬送車が前記通過許可を得られなかった場合に停止する第1停止地点が設定され、
前記通過許可は、第1通過許可と第2通過許可とを含み、
前記区間制御装置は、
前記搬送車に前記第1通過許可を与えた場合には当該搬送車に前記第1通過地点を占有させ、
前記搬送車に前記第2通過許可を与えた場合には当該搬送車に前記第2通過地点を占有させ、
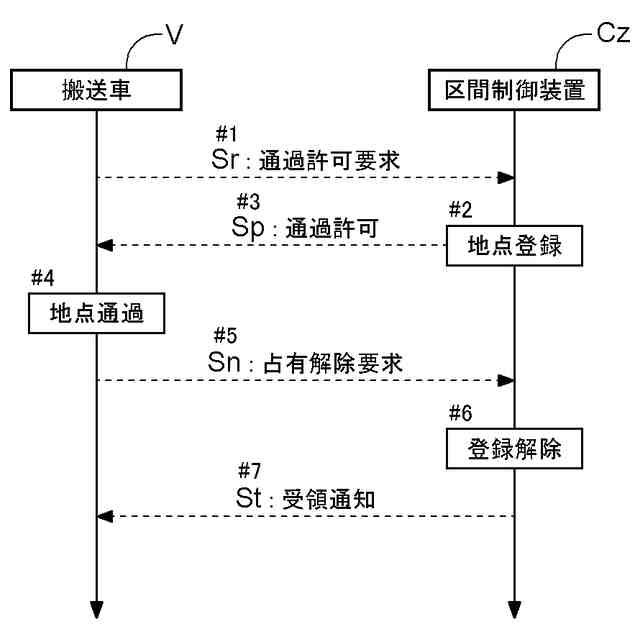
前記搬送車は、前記第1経路又は前記第2経路から前記接続経路へ走行しようとする場合には、前記第1通過許可及び前記第2通過許可の双方を前記区間制御装置に求め、
前記区間制御装置は、前記第1通過許可及び前記第2通過許可の双方が前記搬送車から求められた場合には、前記第1通過地点及び前記第2通過地点の双方が先行する他の前記搬送車によって占有されていない非占有状態であることを条件として、前記第1通過許可及び前記第2通過許可の双方を求めた前記搬送車に前記第1通過地点及び前記第2通過地点の双方を占有させ、
前記搬送車は、自らの走行距離を検出する走行距離検出部を備え、
前記第1停止地点からの前記走行距離として、第1設定距離と、第2設定距離と、が予め設定されており、
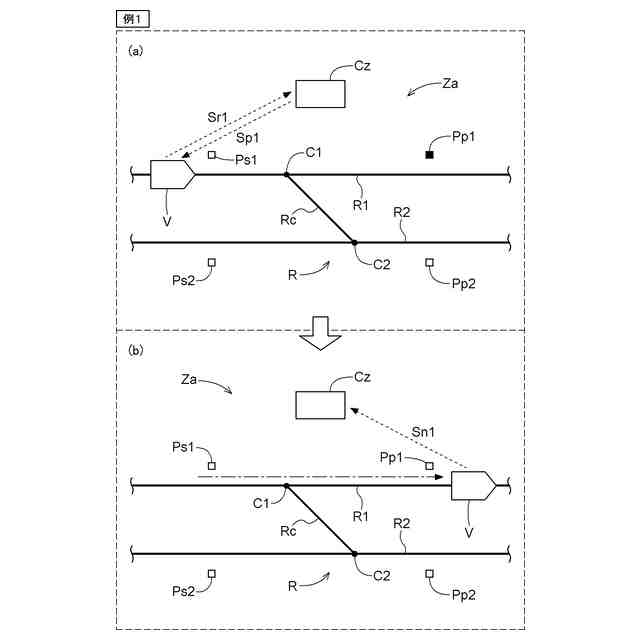
前記第1通過許可及び前記第2通過許可の双方を与えられて前記第2通過地点を通過しようとする前記搬送車は、
前記第1停止地点からの前記走行距離が前記第1設定距離となった場合に、前記第1通過地点の占有を解除する旨の第1占有解除要求を前記区間制御装置に対して行い、
前記第1停止地点からの前記走行距離が前記第2設定距離となった場合に、前記第2通過地点の占有を解除する旨の第2占有解除要求を前記区間制御装置に対して行う、物品搬送設備。
続きを表示(約 870 文字)
【請求項2】
前記搬送車は、前方の他の前記搬送車を検出する検出センサを備え、
前記第1停止地点から前記第1設定距離だけ走行した前記接続経路上の地点にいる先行の前記搬送車が、前記第1経路を直進する後続の前記搬送車の前記検出センサによる検出範囲の軌跡よりも外側となるように、前記第1設定距離が設定されている、請求項1に記載の物品搬送設備。
【請求項3】
前記第1停止地点から前記第1設定距離だけ走行した前記接続経路上の地点にいる先行の前記搬送車が、前記第1経路を直進する後続の前記搬送車の走行軌跡よりも外側となるように、前記第1設定距離が設定されている、請求項1に記載の物品搬送設備。
【請求項4】
前記搬送車は、前方の他の前記搬送車を検出する検出センサを備え、
前記第1停止地点から前記第2設定距離だけ走行した前記接続経路上の地点にいる先行の前記搬送車が、前記第2経路を直進する後続の前記搬送車の前記検出センサによる検出範囲の軌跡に含まれるように、前記第2設定距離が設定されている、請求項1に記載の物品搬送設備。
【請求項5】
先行の前記搬送車が、前記第2通過地点を通過する前に前記第2占有解除要求を行うことにより、先行の前記搬送車による前記第2通過地点の占有が解除された場合に、
前記区間制御装置は、前記第2通過許可を求めた後続の前記搬送車に前記第2通過許可を与える、請求項1から4のいずれか一項に記載の物品搬送設備。
【請求項6】
前記第1経路を走行する先行の前記搬送車が前記第1通過地点を通過しようとし、前記第1経路を走行する後続の前記搬送車が前記第1接続部で分岐して前記接続経路を走行しようとする場合において、
先行の前記搬送車は、前記第1接続部よりも下流側であって前記第1接続部を通過する後続の前記搬送車の走行軌跡よりも外側の位置で、前記第1占有解除要求を前記区間制御装置に対して行う、請求項1から4のいずれか一項に記載の物品搬送設備。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物品を搬送する搬送車と、前記搬送車が走行する走行経路と、前記走行経路のうちの特定の区間である特定区間を走行する前記搬送車に通過許可を与えて当該搬送車の制御を行う区間制御装置と、を備えた物品搬送設備に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
このような物品搬送設備の一例が、搬送台車システムとして、特開2006-313463号公報(特許文献1)に開示されている。以下、背景技術の説明において括弧内に示された符号は、特許文献1のものである。
【0003】
特許文献1に開示されたシステムでは、搬送車(5)の走行経路の分岐部または合流部にロックポイントを設け、このようなロックポイントが設けられた区間(以下、「制御区間」という)を単位として、ロックポイントにおける搬送車(5)の通行の認否を判断している。
【0004】
搬送車(5)は、ロックポイントが設けられた制御区間への進入前に、ゾーンコントローラ(11)に対して、他の搬送車(5)の当該制御区間への進入の排斥を求めるブロッキング要求を行う。ゾーンコントローラ(11)は、ブロッキング要求を行った搬送車(5)に対して当該制御区間の通行を許可する場合は、ブロッキング許可を行い、他の搬送車(5)の通行を排斥する。ゾーンコントローラ(11)は、搬送車(5)の通行後は、当該制御区間におけるブロッキングを解除して、他の搬送車(5)を受け入れ可能な状態となる。
【先行技術文献】
【特許文献】
【0005】
特開2006-313463号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、特許文献1に開示されたシステムでは、ロックポイントにおける搬送車(5)の通行の認否を制御区間単位で判断しているため、1つの制御区間に同時に複数の搬送車(5)が存在し得ない。そのため、当該制御区間における搬送車の通行の効率が低く、同様の制御区間が多数存在する場合には、物品搬送設備の全体として搬送効率を高めることに限界があった。
【0007】
上記実状に鑑みて、走行経路の分岐部または合流部を含む区間における搬送車の通行を効率的に行うことにより、物品搬送設備の全体としての搬送効率を高めることができる技術の実現が望まれている。
【課題を解決するための手段】
【0008】
物品を搬送する搬送車と、
前記搬送車が走行する走行経路と、
前記走行経路のうちの特定の区間である特定区間を走行する前記搬送車に通過許可を与えて当該搬送車の制御を行う区間制御装置と、を備えた物品搬送設備であって、
前記特定区間には、互いに交差しない第1経路及び第2経路と、前記第1経路における第1接続部と前記第2経路における第2接続部とを接続する接続経路と、が含まれ、
前記第1経路及び前記第2経路のそれぞれは、上流側から下流側へ向かって一方向に前記搬送車が走行する経路であり、
前記第1経路における前記第1接続部よりも下流側に、第1通過地点が設定され、
前記第2経路における前記第2接続部よりも下流側に、第2通過地点が設定され、
前記第1経路における前記第1接続部よりも上流側に、前記搬送車が前記通過許可を得られなかった場合に停止する第1停止地点が設定され、
前記通過許可は、第1通過許可と第2通過許可とを含み、
前記区間制御装置は、
前記搬送車に前記第1通過許可を与えた場合には当該搬送車に前記第1通過地点を占有させ、
前記搬送車に前記第2通過許可を与えた場合には当該搬送車に前記第2通過地点を占有させ、
前記搬送車は、前記第1経路又は前記第2経路から前記接続経路へ走行しようとする場合には、前記第1通過許可及び前記第2通過許可の双方を前記区間制御装置に求め、
前記区間制御装置は、前記第1通過許可及び前記第2通過許可の双方が前記搬送車から求められた場合には、前記第1通過地点及び前記第2通過地点の双方が先行する他の前記搬送車によって占有されていない非占有状態であることを条件として、前記第1通過許可及び前記第2通過許可の双方を求めた前記搬送車に前記第1通過地点及び前記第2通過地点の双方を占有させ、
前記搬送車は、自らの走行距離を検出する走行距離検出部を備え、
前記第1停止地点からの前記走行距離として、第1設定距離と、第2設定距離と、が予め設定されており、
前記第1通過許可及び前記第2通過許可の双方を与えられて前記第2通過地点を通過しようとする前記搬送車は、
前記第1停止地点からの前記走行距離が前記第1設定距離となった場合に、前記第1通過地点の占有を解除する旨の第1占有解除要求を前記区間制御装置に対して行い、
前記第1停止地点からの前記走行距離が前記第2設定距離となった場合に、前記第2通過地点の占有を解除する旨の第2占有解除要求を前記区間制御装置に対して行う。
【0009】
上記のような特定区間では、第1経路と第2経路とが互いに交差しないため、接続経路を通行する搬送車が存在しない場合には、第1経路と第2経路とをそれぞれ別の搬送車が同時に通行することが可能である。本構成によれば、第1経路に設けられた第1通過地点と第2経路に設けられた第2通過地点とで、搬送車の通行の認否を個別に判断することができる。従って、複数の搬送車がそれぞれ接続経路を通行せずに第1経路又は第2経路を通行する場合には、それら複数の搬送車に第1経路と第2経路とを同時に走行させることができる。そのため、特定区間全体で搬送車の通行の認否を判断する場合に比べて、特定区間における搬送車の通行を効率的に行うことが可能となる。一方、搬送車が接続経路を介して第1経路から第2経路へ走行或いは第2経路から第1経路へ走行する場合には、区間制御装置は、第1通過地点及び第2通過地点の双方が他の搬送車によって占有されていない非占有状態であることを条件として、搬送車の走行を許可すると共に、走行を許可した当該搬送車に第1通過地点及び第2通過地点の双方を占有させる。これにより、特定区間において複数の搬送車が互いに干渉することを回避できる。以上により、複数の搬送車が互いに干渉することを回避しつつ、物品搬送設備の全体としての搬送効率を高めることができる。
また、本構成によれば、搬送車は、通過地点よりも上流側で占有解除要求を行うことができ、その場合には通過地点の占有の解除を早期に行うことができる。これにより、他の搬送車が、当該通過地点に対する通過許可を早期に得られるようになる。従って、特定区間における複数の搬送車の走行を円滑にすることができる。また、本構成によれば、搬送車が、走行距離検出部により検出された走行距離に基づいて占有解除要求を行うため、占有解除要求を行う基準となる地点を表すマーカ等の部材を走行経路に沿って設置する必要がない。よって、物品搬送設備の簡素化を図り易い。
【0010】
本開示に係る技術のさらなる特徴と利点は、図面を参照して記述する以下の例示的かつ非限定的な実施形態の説明によってより明確になるであろう。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイフク
載置台
24日前
株式会社ダイフク
搬送車
1か月前
株式会社ダイフク
昇降装置
18日前
株式会社ダイフク
洗車方法
1か月前
株式会社ダイフク
洗車方法
1か月前
株式会社ダイフク
天井搬送車
3日前
株式会社ダイフク
走行規制装置
18日前
株式会社ダイフク
搬送システム
1か月前
株式会社ダイフク
物品搬送設備
26日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
搬送システム
16日前
株式会社ダイフク
クランプ装置
16日前
株式会社ダイフク
物品搬送設備
3日前
株式会社ダイフク
物品搬送設備
3日前
株式会社ダイフク
車両制御システム
16日前
株式会社ダイフク
搬送車及び搬送設備
1か月前
株式会社ダイフク
天井保管棚、および搬送システム
24日前
株式会社ダイフク
昇降システム、及びスタッカクレーン
2日前
株式会社ダイフク
洗車機
11日前
株式会社ダイフク
物品仕分け設備
3日前
株式会社ダイフク
スタッカークレーンの建て起こし装置、及びスタッカークレーンの建て起こし方法
16日前
株式会社ダイフク
スタッカークレーンの建て起こし装置、及びスタッカークレーンの建て起こし方法
16日前
個人
方向検出器
3日前
ugo株式会社
移動体
3日前
積水樹脂株式会社
磁性シート
1か月前
個人
車両レバー操作装置
1か月前
株式会社豊田自動織機
自動走行体
2か月前
株式会社豊田自動織機
無人走行体
1か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
トヨタ自動車株式会社
自律移動体
2日前
エイブリック株式会社
基準電圧回路装置
1か月前
トヨタ自動車株式会社
搬送システム
26日前
トヨタ自動車株式会社
搬送ロボット
16日前
株式会社熊谷組
巡回ルート作成装置
1か月前
オムロン株式会社
自律作業システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ