TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024095257
公報種別
公開特許公報(A)
公開日
2024-07-10
出願番号
2022212409
出願日
2022-12-28
発明の名称
電源回路
出願人
ローム株式会社
代理人
個人
,
個人
主分類
G05F
1/56 20060101AFI20240703BHJP(制御;調整)
要約
【課題】モードをシームレスに切り替え可能な電源回路を提供する。
【解決手段】第1入力ピンVIN1には、第1モードおよび第2モードにおいて第1入力電圧V
IN1
が入力される。第2入力ピンVIN2は、第1モードにおいて無入力であり、第2モードにおいて、第1入力電圧V
IN1
より低い第2入力電圧V
IN2
が入力される。第1制御回路120は、出力ピンVOUTに発生する出力電圧V
OUT
が第1目標電圧V
REF1
に近づくように第1出力トランジスタ112を制御する。第2制御回路140は、第1モードにおいて第2出力トランジスタ132を非導通状態とし、第2モードにおいて第2出力トランジスタ132を導通状態とする。第1目標電圧V
REF1
は切り替え可能であり、第2モードにおける第1目標電圧V
REF1(MODE2)
は、第1モードにおける第1目標電圧V
REF1(MODE2)
よりも低い。
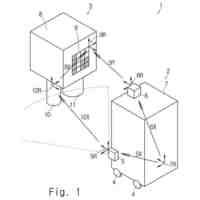
【選択図】図1
特許請求の範囲
【請求項1】
第1モードおよび第2モードにおいて第1入力電圧を受ける第1入力ピンと、
前記第1モードにおいて無入力であり、前記第2モードにおいて、前記第1入力電圧より低い第2入力電圧を受ける第2入力ピンと、
出力ピンと、
前記第1入力ピンと前記出力ピンの間に設けられた第1出力トランジスタと、前記出力ピンに発生する出力電圧が第1目標電圧に近づくように前記第1出力トランジスタを制御する第1制御回路と、を含む第1出力回路と、
前記第2入力ピンと前記出力ピンの間に設けられる第2出力トランジスタと、前記第1モードにおいて前記第2出力トランジスタを非導通状態とし、前記第2モードにおいて前記第2出力トランジスタを導通状態とする第2制御回路と、を含む第2出力回路と、
を備え、
前記第1目標電圧は切り替え可能であり、前記第2モードにおける前記第1目標電圧は、前記第1モードにおける前記第1目標電圧よりも低い、電源回路。
続きを表示(約 540 文字)
【請求項2】
前記第2制御回路は、前記第2モードにおいてアクティブとなり、前記出力電圧が、前記第1モードにおける前記第1目標電圧と等しい第2目標電圧に近づくように、前記第2出力トランジスタを制御する、請求項1に記載の電源回路。
【請求項3】
前記第1制御回路は、第1入力ノードに可変の第1基準電圧を受け、第2入力ノードに前記出力電圧に応じたフィードバック電圧を受け、出力ノードが前記第1出力トランジスタの制御電極と接続された第1オペアンプを含み、
前記第2制御回路は、第1入力ノードに第2基準電圧を受け、第2入力ノードに前記フィードバック電圧を受け、出力ノードが前記第2出力トランジスタの制御電極と接続された第2オペアンプを含む、請求項2に記載の電源回路。
【請求項4】
前記第2制御回路は、前記第1モードにおいて前記第2出力トランジスタをオフし、前記第2モードにおいて前記第2出力トランジスタをオンするように構成され、
前記第2入力電圧は、前記第1モードにおける前記第1目標電圧と等しい、請求項1に記載の電源回路。
【請求項5】
ひとつの半導体基板に一体集積化される、請求項1から4のいずれかに記載の電源回路。
発明の詳細な説明
【技術分野】
【0001】
本開示は、電源回路に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
電気回路において、電圧レベルが異なる2つの電源電圧が存在する場合、2入力、1出力の電源回路が使用される。この電源回路は、2つの入力ピンを有し、2つの入力ピンそれぞれに電源電圧を受け、出力ピンに接続される負荷に、安定化された出力電圧を供給する。電源回路は、第1入力ピンの電圧を利用して出力電圧を生成するモードと、第2入力ピンの電圧を利用して出力電圧を生成するモードと、が切り替え可能である。
【発明の概要】
【発明が解決しようとする課題】
【0003】
本開示は係る状況においてなされたものであり、そのある態様の例示的な目的のひとつは、モードをシームレスに切り替え可能な電源回路の提供にある。
【課題を解決するための手段】
【0004】
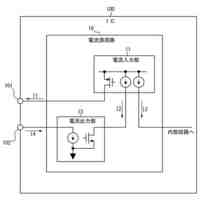
本開示のある態様の電源回路は、第1モードおよび第2モードにおいて第1入力電圧を受ける第1入力ピンと、第1モードにおいて無入力であり、第2モードにおいて、第1入力電圧より低い第2入力電圧を受ける第2入力ピンと、出力ピンと、第1入力ピンと出力ピンの間に設けられた第1出力トランジスタと、出力ピンに発生する出力電圧が第1目標電圧に近づくように第1出力トランジスタを制御する第1制御回路と、を含む第1出力回路と、第2入力ピンと出力ピンの間に設けられる第2出力トランジスタと、第1モードにおいて第2出力トランジスタを非導通状態とし、第2モードにおいて第2出力トランジスタを導通状態とする第2制御回路と、を含む第2出力回路と、を備える。第1目標電圧は切り替え可能であり、第2モードにおける第1目標電圧は、第1モードにおける第1目標電圧よりも低い。
【0005】
なお、以上の構成要素を任意に組み合わせたもの、構成要素や表現を、方法、装置、システムなどの間で相互に置換したものもまた、本発明あるいは本開示の態様として有効である。さらに、この項目(課題を解決するための手段)の記載は、本発明の欠くべからざるすべての特徴を説明するものではなく、したがって、記載されるこれらの特徴のサブコンビネーションも、本発明たり得る。
【発明の効果】
【0006】
本開示のある態様によれば、モードをシームレスに切り替えることができる。
【図面の簡単な説明】
【0007】
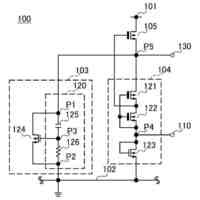
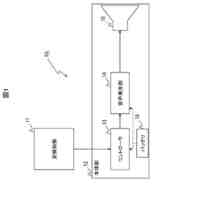
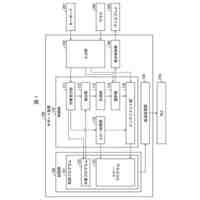
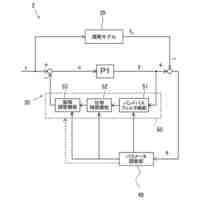
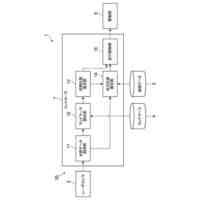
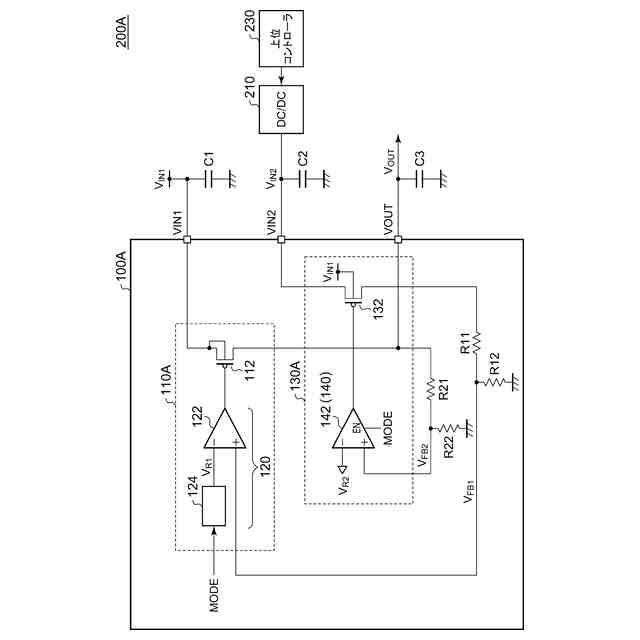
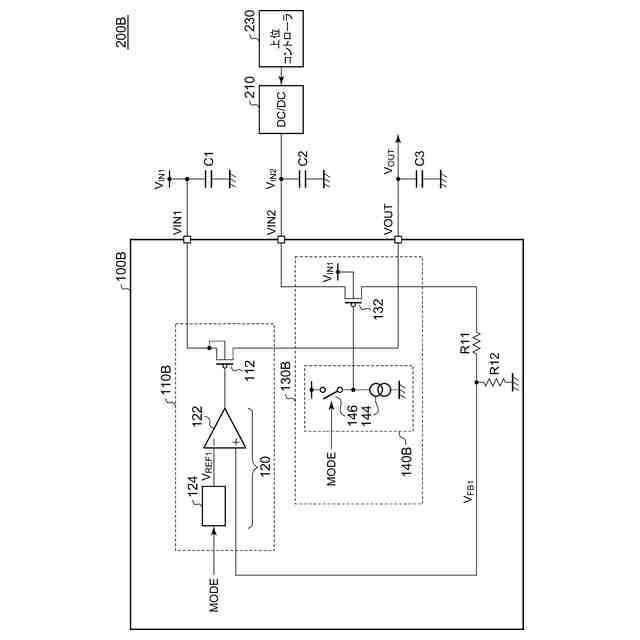
図1は、実施形態に係る電源回路を備えるシステムのブロック図である。
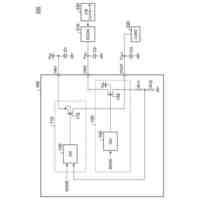
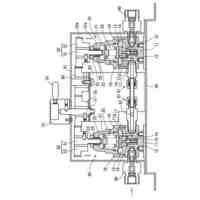
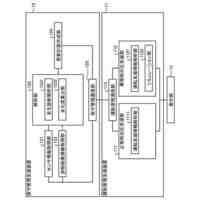
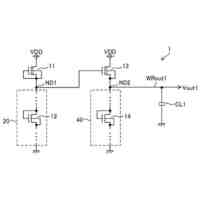
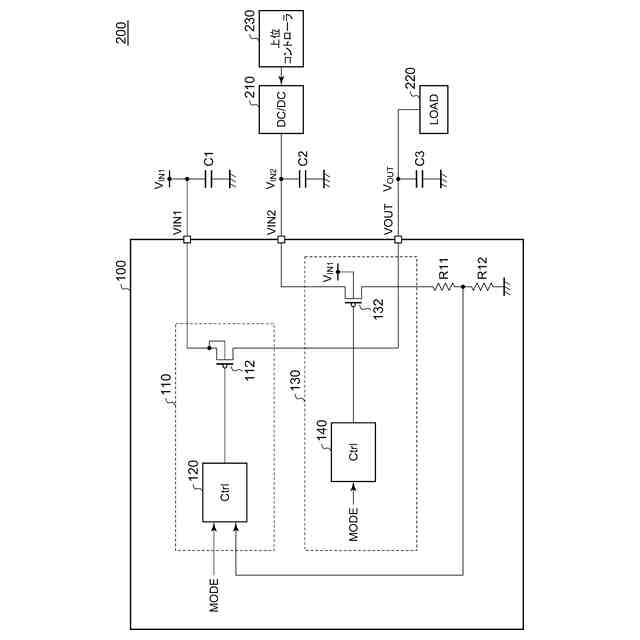
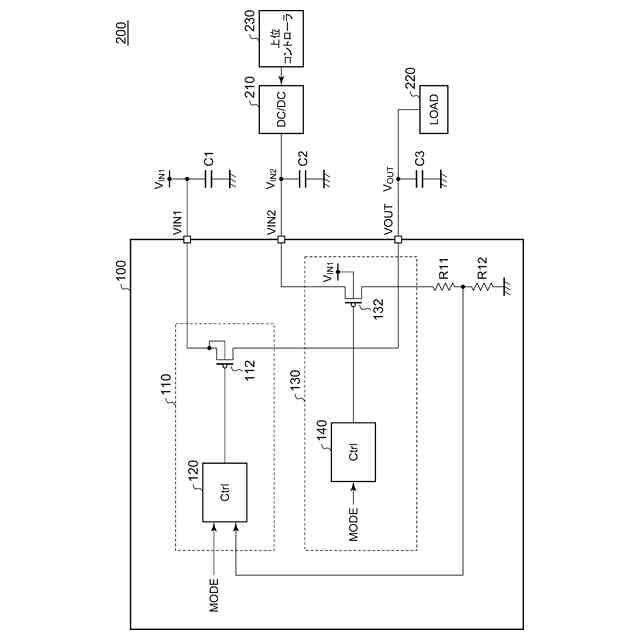
図2は、実施例1に係る電源回路を備える電源システムのブロック図である。
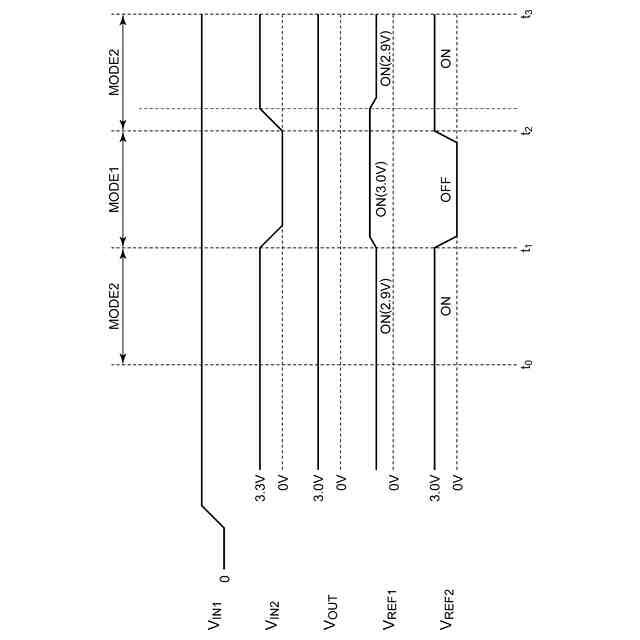
図3は、図2の電源回路の動作を説明する図である。
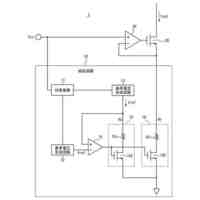
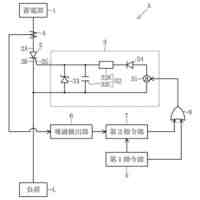
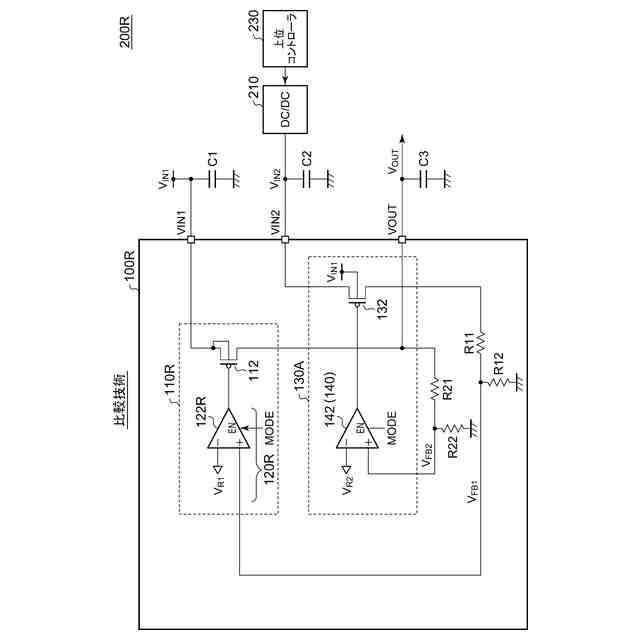
図4は、比較技術に係る電源回路を備える電源システムの回路図である。
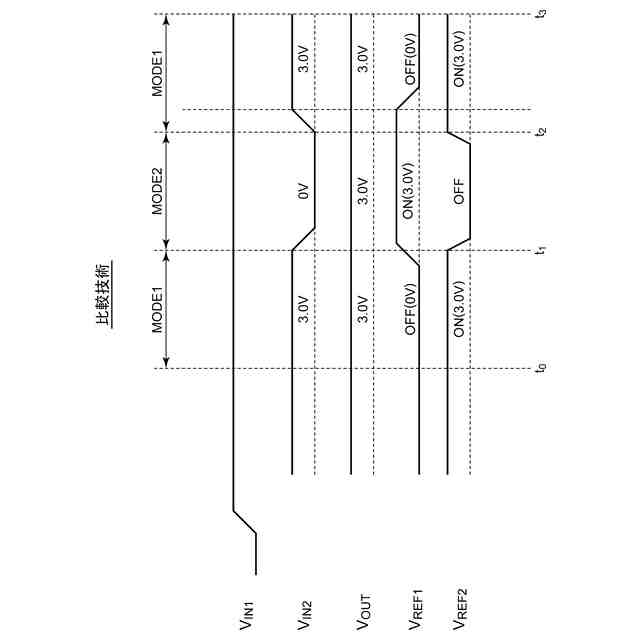
図5は、図4の電源回路の動作を説明する図である。
図6は、実施例2に係る電源回路を備える電源システムの回路図である。
【発明を実施するための形態】
【0008】
(実施形態の概要)
本開示のいくつかの例示的な実施形態の概要を説明する。この概要は、後述する詳細な説明の前置きとして、実施形態の基本的な理解を目的として、1つまたは複数の実施形態のいくつかの概念を簡略化して説明するものであり、発明あるいは開示の広さを限定するものではない。この概要は、考えられるすべての実施形態の包括的な概要ではなく、すべての実施形態の重要な要素を特定することも、一部またはすべての態様の範囲を線引きすることも意図していない。便宜上、「一実施形態」は、本明細書に開示するひとつの実施形態(実施例や変形例)または複数の実施形態(実施例や変形例)を指すものとして用いる場合がある。
【0009】
一実施形態に係る電源回路は、第1モードおよび第2モードにおいて第1入力電圧を受ける第1入力ピンと、第1モードにおいて無入力であり、第2モードにおいて、第1入力電圧より低い第2入力電圧を受ける第2入力ピンと、出力ピンと、第1入力ピンと出力ピンの間に設けられた第1出力トランジスタと、出力ピンに発生する出力電圧が第1目標電圧に近づくように第1出力トランジスタを制御する第1制御回路と、を含む第1出力回路と、第2入力ピンと出力ピンの間に設けられる第2出力トランジスタと、第1モードにおいて第2出力トランジスタを非導通状態とし、第2モードにおいて第2出力トランジスタを導通状態とする第2制御回路と、を含む第2出力回路と、を備える。第1目標電圧は切り替え可能であり、第2モードにおける第1目標電圧は、第1モードにおける第1目標電圧よりも低い。
【0010】
この構成によれば、第2モードの間も、第1制御回路は動作し続けるため、複雑な制御なしで、第2モードから第1モードへシームレスに切り替えることが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業車両
26日前
エイブリック株式会社
基準電流源
1か月前
井関農機株式会社
作業車両
26日前
エイブリック株式会社
定電圧回路
25日前
ローム株式会社
電源回路
24日前
トヨタ自動車株式会社
移動システム
24日前
日昌電気制御株式会社
管理システム
8日前
井関農機株式会社
自立走行農作業車
25日前
トヨタ自動車株式会社
設備の制御方法
1か月前
株式会社ユタカ
半自動切換装置
9日前
井関農機株式会社
作業車両の作業管理システム
26日前
トヨタ自動車株式会社
マーカースタンド
3日前
株式会社豊田自動織機
自律走行車両
8日前
横河電機株式会社
電流源回路
1か月前
マキノジェイ株式会社
工作機械
1か月前
住友重機械工業株式会社
自律走行台車
1か月前
個人
ペダル操作検知装置
1か月前
三菱電機株式会社
管理システムおよび管理方法
1か月前
横河電機株式会社
電圧電流変換回路
3日前
アズビル株式会社
パラメータ探索装置および方法
1か月前
エンゼルグループ株式会社
無人搬送システム
2日前
オムロン株式会社
サポート装置およびサポート方法
1か月前
ニチコン株式会社
電源装置
5日前
トヨタ自動車株式会社
充電装置
1か月前
シンフォニアテクノロジー株式会社
共振抑制制御装置
10日前
シンフォニアテクノロジー株式会社
共振抑制制御装置
10日前
ローム株式会社
電圧生成回路
1か月前
株式会社FUJI
工作機械
8日前
株式会社デンソー
ペダル装置
1か月前
株式会社FUJI
工作機械
8日前
株式会社デンソー
シリーズ電源
11日前
オークマ株式会社
工作機械の制御方法及び制御装置
1か月前
株式会社豊田自動織機
自己位置推定装置
5日前
パナソニックIPマネジメント株式会社
物品移送装置
10日前
丸北研磨株式会社
稼働状況管理システム
1か月前
オムロン株式会社
回転体ユニットおよびこれを備えた操作装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ