TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024101210
公報種別
公開特許公報(A)
公開日
2024-07-29
出願番号
2023005051
出願日
2023-01-17
発明の名称
自己位置推定装置
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20240722BHJP(制御;調整)
要約
【課題】自己位置推定を行う環境に関わらず、移動体の初期位置の設定にかかる時間を短縮することができる自己位置推定装置を提供する。
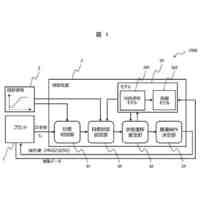
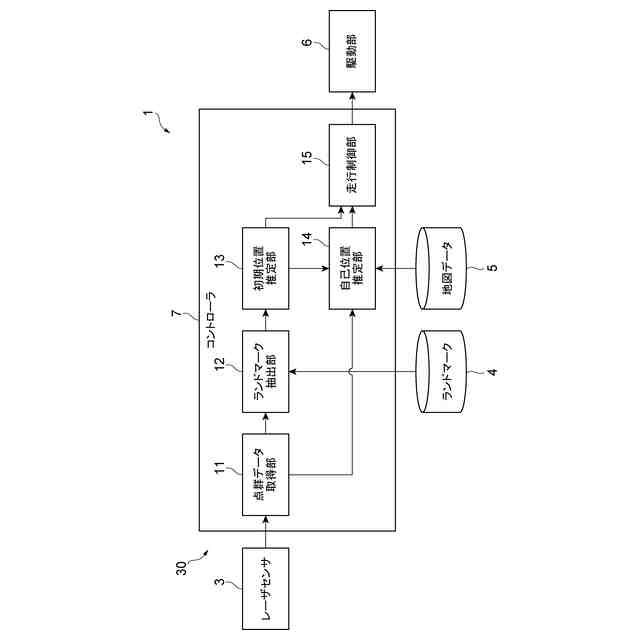
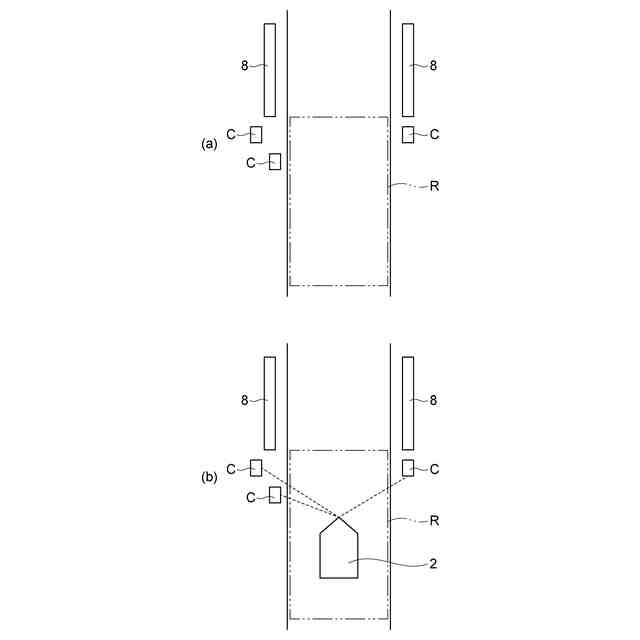
【解決手段】自己位置推定装置30は、移動体2と移動体2の周囲に存在する物体8との位置関係を検出するレーザセンサ3と、移動体2の走行開始領域Rの周囲に配置されると共にレーザセンサ3により検出可能な形状を有するランドマークCの位置及び形状を記憶するランドマークデータベース4と、レーザセンサ3の検出データにおいてランドマークCを抽出するランドマーク抽出部12と、ランドマークCの位置に基づいて、移動体2の初期位置を推定する初期位置推定部13と、移動体2の初期位置が推定された後、初期位置を自己位置の推定の開始点として、レーザセンサ3の検出データに基づいて移動体2の自己位置を推定する自己位置推定部14とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
移動体の自己位置の推定を行う自己位置推定装置において、
前記移動体と前記移動体の周囲に存在する物体との位置関係を検出する物体検出部と、
前記移動体の走行開始領域の周囲に配置されると共に前記物体検出部により検出可能な形状を有する特徴物の位置及び形状を記憶する特徴物記憶部と、
前記物体検出部の検出データにおいて前記特徴物記憶部に記憶された前記特徴物を抽出する特徴物抽出部と、
前記特徴物抽出部により抽出された前記特徴物の位置に基づいて、前記移動体の初期位置を推定する初期位置推定部と、
前記初期位置推定部により前記移動体の初期位置が推定された後、前記初期位置を自己位置の推定の開始点として、前記物体検出部の検出データに基づいて前記移動体の自己位置を推定する自己位置推定部とを備える自己位置推定装置。
続きを表示(約 420 文字)
【請求項2】
前記物体検出部の検出データにおいて前記特徴物に適した特徴的な形状があるかどうかを判断し、前記特徴的な形状があるときは、前記特徴的な形状の位置を前記特徴物の位置として前記特徴物記憶部に登録する特徴物登録部を更に備える請求項1記載の自己位置推定装置。
【請求項3】
前記特徴物は、前記走行開始領域の周囲に少なくとも3つ設置されており、
前記初期位置推定部は、前記3つの特徴物の位置に基づいて、前記移動体の初期位置を推定する請求項1記載の自己位置推定装置。
【請求項4】
前記移動体が走行するエリアの地図データを記憶する地図記憶部を更に備え、
前記自己位置推定部は、前記初期位置を前記自己位置の推定の開始点として、前記物体検出部の検出データと前記地図記憶部に記憶された前記地図データとをマッチングさせて、前記移動体の自己位置を推定する請求項1記載の自己位置推定装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自己位置推定装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来の自己位置推定装置としては、例えば特許文献1に記載されているように、GNSSまたは手動入力等により移動体の初期位置姿勢を取得した後、LiDAR等の既存手法を利用してセンサ点群及び地図点群を取得し、センサ点群と地図点群とのボクセルに基づくスキャンマッチングを行うことで、移動体の自己位置を推定する技術が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2019-40445号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、スキャンマッチングにおける自己位置推定の開始点は、ボクセル分割等によらず、センサ点群と地図点群とが近いことが必要である。センサ点群と地図点群との乖離が大きいと、移動体の初期位置が特定されず、スキャンマッチングを開始することができない。このため、上記従来技術のようにスキャンマッチングにより自己位置推定を行う場合には、GPS等のセンサデータを利用して、移動体の概算位置を把握することで、移動体の初期位置を特定したうえで、自己位置推定を開始していた。
【0005】
しかし、GPSは屋外等の限定的な場所でしか利用することができない等、センサ点群を取得するセンサとは別のセンサを使用することができない環境下では、特定の場所に自己位置推定の開始点を指定し、利用者が手動により移動体を指定地点に配置することで、移動体の初期位置を設定してから、自己位置推定を開始する必要があった。この場合には、利用者による移動体の配置ずれが発生しやすく、移動体の初期位置の設定を失敗することがある。従って、移動体を指定地点に正確に配置しようとすると、移動体の初期位置の設定に時間がかかってしまう。
【0006】
本発明の目的は、自己位置推定を行う環境に関わらず、移動体の初期位置の設定にかかる時間を短縮することができる自己位置推定装置を提供することである。
【課題を解決するための手段】
【0007】
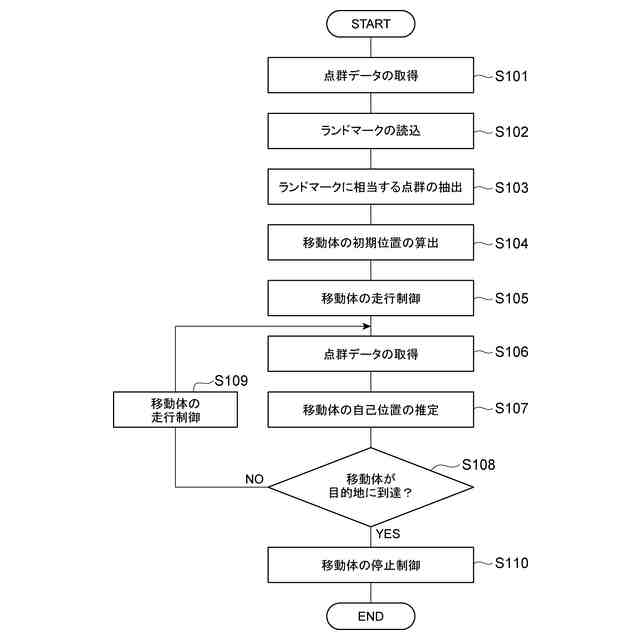
(1)本発明の一態様は、移動体の自己位置の推定を行う自己位置推定装置において、移動体と移動体の周囲に存在する物体との位置関係を検出する物体検出部と、移動体の走行開始領域の周囲に配置されると共に物体検出部により検出可能な形状を有する特徴物の位置及び形状を記憶する特徴物記憶部と、物体検出部の検出データにおいて特徴物記憶部に記憶された特徴物を抽出する特徴物抽出部と、特徴物抽出部により抽出された特徴物の位置に基づいて、移動体の初期位置を推定する初期位置推定部と、初期位置推定部により移動体の初期位置が推定された後、初期位置を自己位置の推定の開始点として、物体検出部の検出データに基づいて移動体の自己位置を推定する自己位置推定部とを備える。
【0008】
このような自己位置推定装置において、特徴物記憶部には、移動体の走行開始領域の周囲に配置されると共に物体検出部により検出可能な形状を有する特徴物の位置及び形状が予め記憶されている。まず物体検出部によって移動体と移動体の周囲に存在する物体との位置関係が検出される。そして、物体検出部の検出データにおいて特徴物が抽出され、その特徴物の位置に基づいて移動体の初期位置が推定される。このため、移動体の利用者は、初期位置として予め指定された自己位置の推定の開始点に正確に移動体を配置する必要が無い。また、移動体の初期位置を推定するために物体検出部とは別のセンサを使用する必要も無い。これにより、自己位置推定を行う環境に関わらず、移動体の初期位置の設定にかかる時間が短縮される。その結果、移動体の利用者の負担を軽減することができる。
【0009】
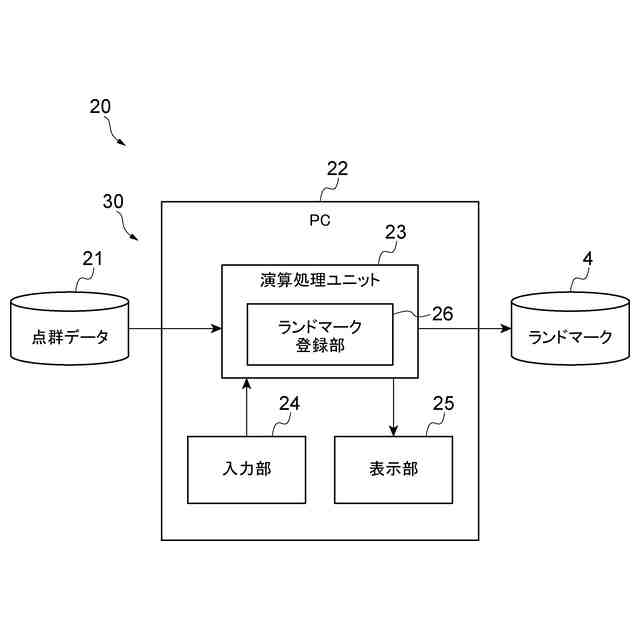
(2)上記の(1)において、自己位置推定装置は、物体検出部の検出データにおいて特徴物に適した特徴的な形状があるかどうかを判断し、特徴的な形状があるときは、特徴的な形状の位置を特徴物の位置として特徴物記憶部に登録する特徴物登録部を更に備えてもよい。このような構成では、物体検出部の検出データに特徴的な形状が含まれているときは、その特徴的な形状に相当する部分が特徴物として特徴物記憶部に登録される。このため、移動体の利用者は、特徴物を自分で用意して設置しなくて済む。従って、移動体の利用者の負担を更に軽減することができる。
【0010】
(3)上記の(1)または(2)において、特徴物は、走行開始領域の周囲に少なくとも3つ設置されており、初期位置推定部は、3つの特徴物の位置に基づいて、移動体の初期位置を推定してもよい。このような構成では、三角測量の計算式を用いて、3つの特徴物の位置から移動体の初期位置を容易に求めることができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
積水樹脂株式会社
磁性シート
4日前
個人
車両レバー操作装置
4日前
株式会社豊田自動織機
自動走行体
1か月前
株式会社FUJI
工作機械
1か月前
株式会社豊田自動織機
無人走行体
22日前
エイブリック株式会社
基準電圧回路
11日前
アズビル株式会社
設定システム
12日前
エイブリック株式会社
基準電圧回路装置
7日前
オムロン株式会社
自律作業システム
22日前
株式会社熊谷組
巡回ルート作成装置
11日前
エイブリック株式会社
シャントレギュレータ
18日前
株式会社ダイヘン
電力変換装置
13日前
株式会社ダイヘン
電力変換装置
13日前
株式会社ダイフク
搬送設備
1か月前
エイブリック株式会社
ボルテージレギュレータ
15日前
オムロン株式会社
設計装置および設計方法
22日前
東芝ライテック株式会社
管理システム
18日前
株式会社FUJI
作業機の操作表示システム
12日前
株式会社フカデン
外周部加工システム
1か月前
株式会社デンソー
電子制御装置
1か月前
株式会社ダイフク
物品搬送設備
22日前
大阪瓦斯株式会社
二次圧制御機構
1か月前
大阪瓦斯株式会社
二次圧制御機構
1か月前
アズビル株式会社
診断システムおよび診断方法
18日前
日立建機株式会社
自律走行システム
1か月前
株式会社デンソー
移動体制御装置
1か月前
株式会社豊田自動織機
無人走行体の走行制御システム
11日前
株式会社栗本鐵工所
触覚提示装置
12日前
横河電機株式会社
モジュール
6日前
株式会社豊田自動織機
移動体制御システム
4日前
本田技研工業株式会社
運転補助装置
7日前
株式会社日立製作所
制御装置、制御方法
11日前
株式会社藤千商会
移動体制御システムおよび移動体
21日前
株式会社ダイフク
搬送設備の検査装置
1か月前
トヨタ自動車株式会社
ソーラー充電システム
18日前
ローム株式会社
リニア電源回路
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ