TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024127058
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023035917
出願日
2023-03-08
発明の名称
電子制御装置
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
主分類
G05B
23/02 20060101AFI20240912BHJP(制御;調整)
要約
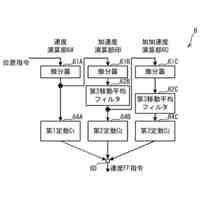
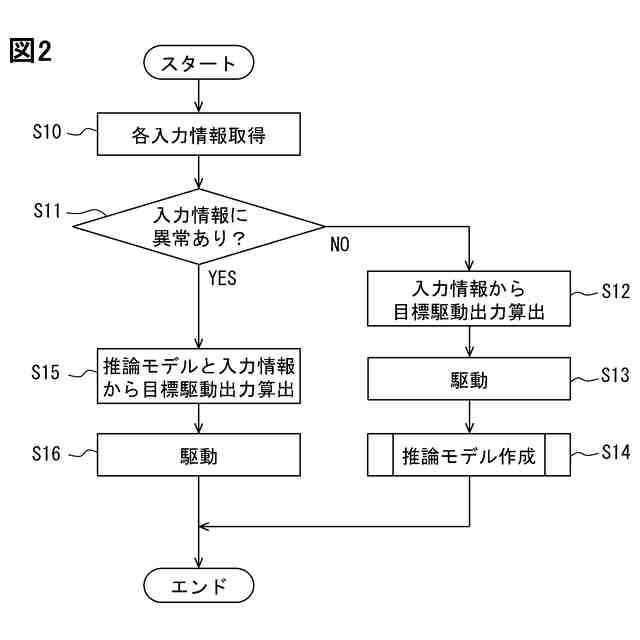
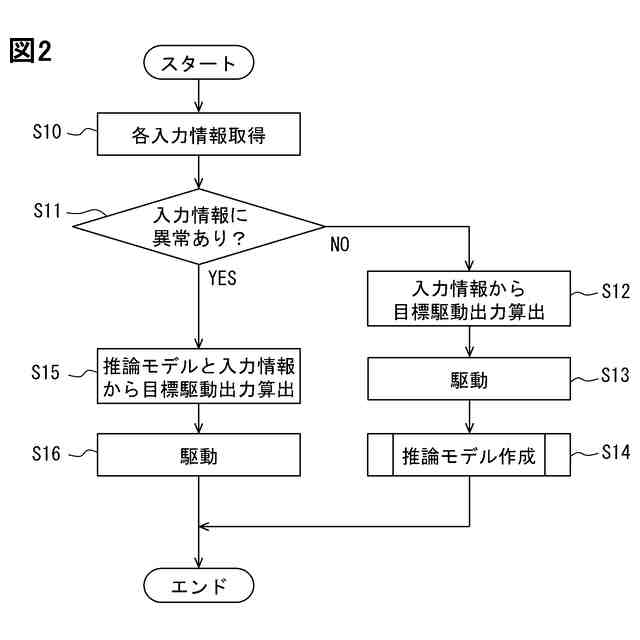
【課題】複数の入力情報の一つに異常が生じていた場合であっても正しく目標駆動出力を算出可能な電子制御装置を提供すること。
【解決手段】電子制御装置は、複数のセンサとアクチュエータと接続されている。電子制御装置は、複数のセンサのそれぞれから入力情報を取得し、入力情報に異常があるか否かを判定する(S10、S11)。電子制御装置は、入力情報に異常があると判定しなかった場合、複数の入力情報から駆動対象装置への目標駆動出力を算出する(S12)。一方、電子制御装置は、入力情報に異常があると判定した場合、推論モデルを用いて目標駆動出力を算出する(S15)。
【選択図】図2
特許請求の範囲
【請求項1】
駆動対象装置を駆動制御する電子制御装置であって、
複数の入力情報を取得する取得部(S10)と
複数の前記入力情報の少なくとも一つに異常があるか否かを判定する判定部(S11)と、
前記判定部にて異常があると判定されなかった場合、複数の前記入力情報から前記駆動対象装置への目標駆動出力を算出する第1算出部(S12)と、
前記判定部にて異常があると判定された場合、推論モデルを用いて前記目標駆動出力を算出する第2算出部(S15)と、を備えた電子制御装置。
続きを表示(約 420 文字)
【請求項2】
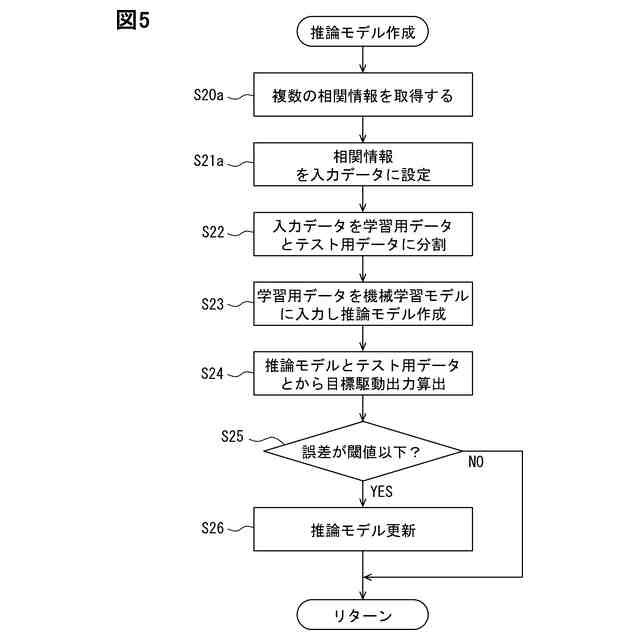
前記判定部にて異常があると判定されなかった場合に前記推論モデルを作成する作成部(S14)をさらに備えた請求項1に記載の電子制御装置。
【請求項3】
前記作成部は、前記判定部にて異常があると判定されなかった前記入力情報の少なくとも一つを用いて前記推論モデルを作成する請求項2に記載の電子制御装置。
【請求項4】
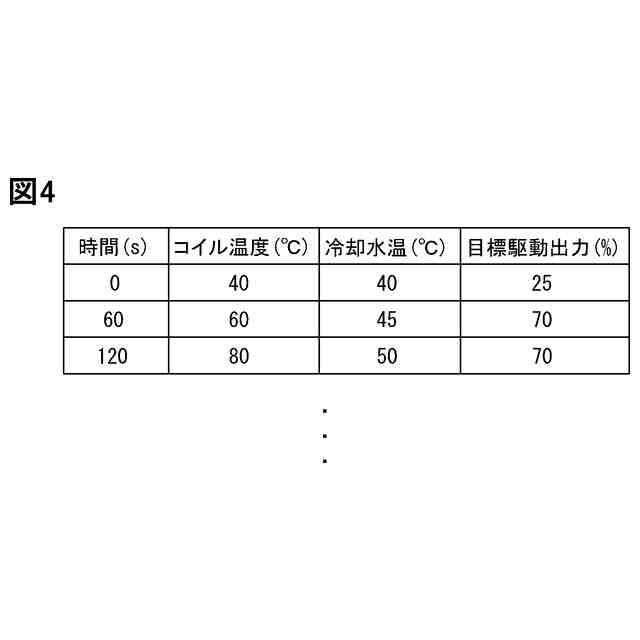
前記取得部は、複数の前記入力情報に加えて、前記入力情報とは異なり前記目標駆動出力に相関する相関情報を取得するものであり、
前記作成部は、前記相関情報を用いて前記推論モデルを作成する請求項2に記載の電子制御装置。
【請求項5】
前記作成部は、機械学習によって前記推論モデルを作成する請求項3または4に記載の電子制御装置。
【請求項6】
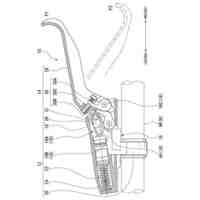
前記駆動対象装置として電動ウォータポンプを駆動制御する請求項1または2に記載の電子制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、電子制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、電子制御装置の一例として、電動ウォータポンプを制御する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2009-197616号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
電子制御装置は、複数の入力情報から目標駆動出力を算出する。しかしながら、電子制御装置は、一つの入力情報に異常が生じていた場合、正しく目標駆動出力を算出することができない。
【0005】
開示される一つの目的は、複数の入力情報の一つに異常が生じていた場合であっても正しく目標駆動出力を算出可能な電子制御装置を提供することである。
【課題を解決するための手段】
【0006】
ここに開示された電子制御装置は、
駆動対象装置を駆動制御する電子制御装置であって、
複数の入力情報を取得する取得部(S10)と
複数の入力情報の少なくとも一つに異常があるか否かを判定する判定部(S11)と、
判定部にて異常があると判定されなかった場合、複数の入力情報から駆動対象装置への目標駆動出力を算出する第1算出部(S12)と、
判定部にて異常があると判定された場合、推論モデルを用いて目標駆動出力を算出する第2算出部(S15)と、を備えたことを特徴とする。
【0007】
このように、電子制御装置は、判定部にて異常があると判定されなかった場合、複数の入力情報から目標駆動出力を算出する。しかしながら、電子制御装置は、判定部にて異常があると判定された場合、推論モデルを用いて目標駆動出力を算出する。このため、電子制御装置は、複数の入力情報の少なくとも一つに異常が生じていても正しく目標駆動出力を算出できる。
【0008】
この明細書において開示された複数の態様は、それぞれの目的を達成するために、互いに異なる技術的手段を採用する。請求の範囲およびこの項に記載した括弧内の符号は、後述する実施形態の部分との対応関係を例示的に示すものであって、技術的範囲を限定することを意図するものではない。この明細書に開示される目的、特徴、および効果は、後続の詳細な説明、および添付の図面を参照することによってより明確になる。
【図面の簡単な説明】
【0009】
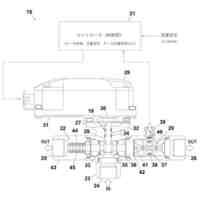
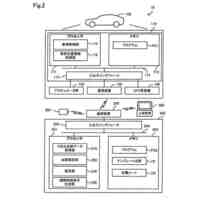
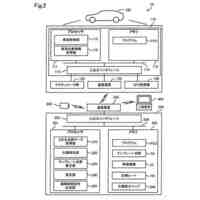
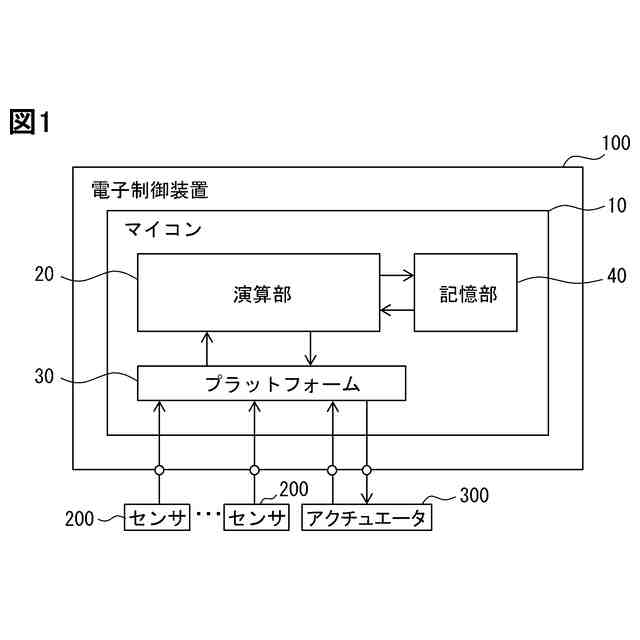
電子制御装置の概略構成を示すブロック図である。
電子制御装置の処理動作を示すフローチャートである。
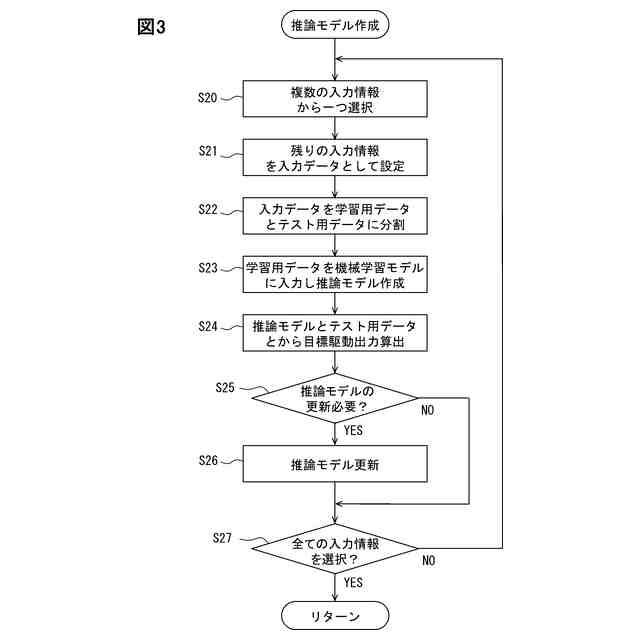
電子制御装置の推論モデル作成処理を示すフローチャートである。
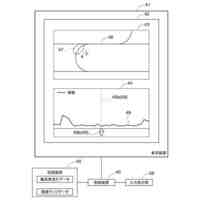
入力データの一例を示す図面である。
変形例における電子制御装置の推論モデル作成処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下において、図面を参照しながら、本開示を実施するための形態を説明する。本実施形態では、一例として、車両に搭載された駆動対象装置を駆動制御する電子制御装置100を採用する。また、本実施形態では、駆動対象装置の一例として電動ウォータポンプを採用する。しかしながら、本開示は、上記構成に限定されない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
17日前
村田機械株式会社
産業機械
1か月前
アズビル株式会社
制御装置
10日前
トヨタ自動車株式会社
自律移動体
1か月前
コフロック株式会社
流量制御装置
11日前
株式会社丸和製作所
入力機器
10日前
株式会社クボタ
作業車
1か月前
株式会社明電舎
車両
1か月前
株式会社豊田自動織機
荷役車両
3日前
株式会社フジキン
流量制御装置
10日前
アズビル株式会社
パラメータ調整装置
1か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社村田製作所
温度補償回路
17日前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社ダイフク
搬送設備
18日前
キヤノン株式会社
情報処理装置
1か月前
ローム株式会社
電源回路
2か月前
株式会社ダイフク
物品搬送設備
18日前
株式会社ダイフク
物品搬送設備
18日前
株式会社ダイフク
物品搬送設備
24日前
旭精機工業株式会社
監視データ処理装置
25日前
東フロコーポレーション株式会社
流量制御装置
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
11日前
株式会社ダイフク
情報表示システム
2か月前
ブラザー工業株式会社
数値制御装置及び工作機械
1か月前
株式会社日立製作所
移動体制御システム
2か月前
株式会社ディスコ
搬送車
1か月前
株式会社FUJI
工作機械
11日前
ローム株式会社
定電圧生成回路
1か月前
ブラザー工業株式会社
調整方法及び数値制御装置
4日前
株式会社日立製作所
診断装置および診断方法
1か月前
ローム株式会社
定電圧生成回路
1か月前
キヤノン株式会社
制御システム及び制御方法
24日前
トヨタ自動車株式会社
制御装置
2か月前
トヨタ自動車株式会社
制御装置
2か月前
株式会社シマノ
人力駆動車の操作装置
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ