TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024173582
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023181556
出願日
2023-10-23
発明の名称
制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
G05D
1/249 20240101AFI20241205BHJP(制御;調整)
要約
【課題】測距装置に死角が生じている場合にも移動体の位置や向きを正しく推定できる技術を提供する。
【解決手段】本開示の制御装置は、測距装置を用いて測定された移動体の3次元点群データを用いて、移動体を制御するための制御指令を生成する。制御装置は、測距装置から取得した3次元点群データに欠損部分が生じている場合に、テンプレート点群から欠損部分に相当する欠損相当部分を除外した実質点群部分と、3次元点群データとのマッチングを行うことによって移動体の位置及び向きの少なくとも一方を推定する推定部を備える。
【選択図】図2
特許請求の範囲
【請求項1】
測距装置を用いて測定された移動体の3次元点群データを用いて、前記移動体を制御するための制御指令を生成する制御装置であって、
前記測距装置から取得した前記3次元点群データに欠損部分が生じている場合に、テンプレート点群から前記欠損部分に相当する欠損相当部分を除外した実質点群部分と、前記3次元点群データとのマッチングを行うことによって前記移動体の位置及び向きの少なくとも一方を推定する推定部、を備える制御装置。
続きを表示(約 490 文字)
【請求項2】
請求項1に記載の制御装置であって、更に、
前記テンプレート点群から前記欠損相当部分を削除することによって修正テンプレート点群を作成するテンプレート点群修正部を備え、
前記推定部は、前記3次元点群データと前記修正テンプレート点群とのマッチングを行うことによって前記移動体の位置及び向きの少なくとも一方を推定する、制御装置。
【請求項3】
請求項1に記載の制御装置であって、更に、
前記3次元点群データの前記欠損部分を特定する欠損特定部を備える、制御装置。
【請求項4】
請求項3に記載の制御装置であって、
前記欠損特定部は、前記3次元点群データの履歴を参照して、前記測距装置から取得した前記3次元点群データの前記欠損部分を特定する、制御装置。
【請求項5】
請求項3に記載の制御装置であって、
前記欠損特定部は、前記移動体と前記測距装置の距離に応じた前記欠損部分が登録されたマップを用いて、前記移動体と前記測距装置の距離に応じて前記欠損部分を特定する、制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体の制御装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
車両の製造工程において、車両を自走搬送させる技術が知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特表2017-538619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両などの移動体を自走搬送により移動させる際に、移動体の位置や向きを推定する処理が実行される。移動体の位置や向きは、カメラやレーダーなどの測距装置を用いて取得した3次元点群データを用いて推定できる。しかしながら、測距装置に死角が生じている場合に、3次元点群データをそのまま用いて推定処理を実行すると、正しい推定結果が得られない可能性がある。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の一形態によれば、測距装置を用いて測定された移動体の3次元点群データを用いて、前記移動体を制御するための制御指令を生成する制御装置が提供される。この制御装置は、前記測距装置から取得した前記3次元点群データに欠損部分が生じている場合に、テンプレート点群から前記欠損部分に相当する欠損相当部分を除外した実質点群部分と、前記3次元点群データとのマッチングを行うことによって前記移動体の位置及び向きの少なくとも一方を推定する推定部を備える。
この制御装置によれば、3次元点群データに欠損部分が生じている場合にも、移動体の位置及び向きの少なくとも一方を正しく推定できる。
(2)上記制御装置は、更に、前記テンプレート点群から前記欠損相当部分を削除することによって修正テンプレート点群を作成するテンプレート点群修正部を備え、前記推定部は、前記3次元点群データと前記修正テンプレート点群とのマッチングを行うことによって前記移動体の位置及び向きの少なくとも一方を推定するものとしてもよい。
この制御装置によれば、修正テンプレート点群を用いるので、推定の処理速度を高めることができる。
(3)上記制御装置は、更に、前記3次元点群データの前記欠損部分を特定する欠損特定部を備えるものとしてもよい。
この制御装置によれば、欠損部分を特定した上で、テンプレート点群から欠損相当部分を除外できる。
(4)上記制御装置において、前記欠損特定部は、前記3次元点群データの履歴を参照して、前記測距装置から取得した前記3次元点群データの前記欠損部分を特定するものとしてもよい。
この制御装置によれば、欠損部分を正しく特定できる。
(5)上記制御装置において、前記欠損特定部は、前記移動体と前記測距装置の距離に応じた前記欠損部分が登録されたマップを用いて、前記移動体と前記測距装置の距離に応じて前記欠損部分を特定するものとしてもよい。
この制御装置によれば、欠損部分を容易に特定できる。
【図面の簡単な説明】
【0007】
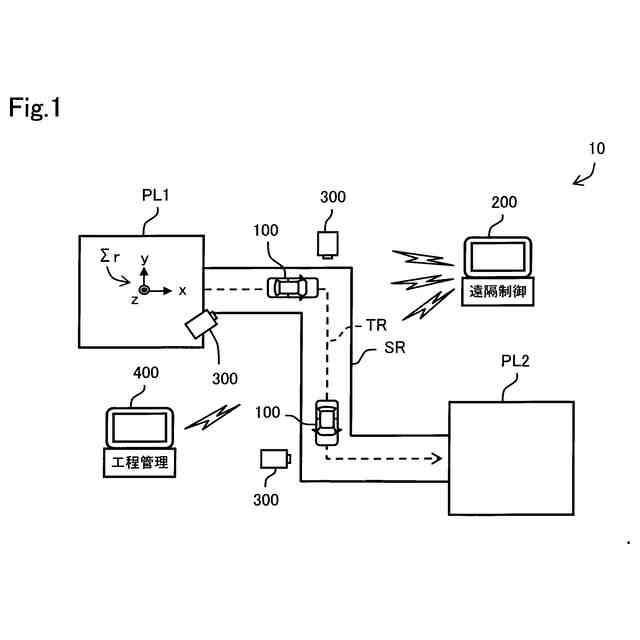
実施形態における遠隔制御システムの構成を示す概念図。
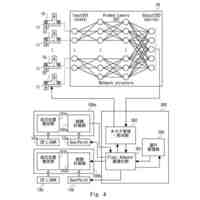
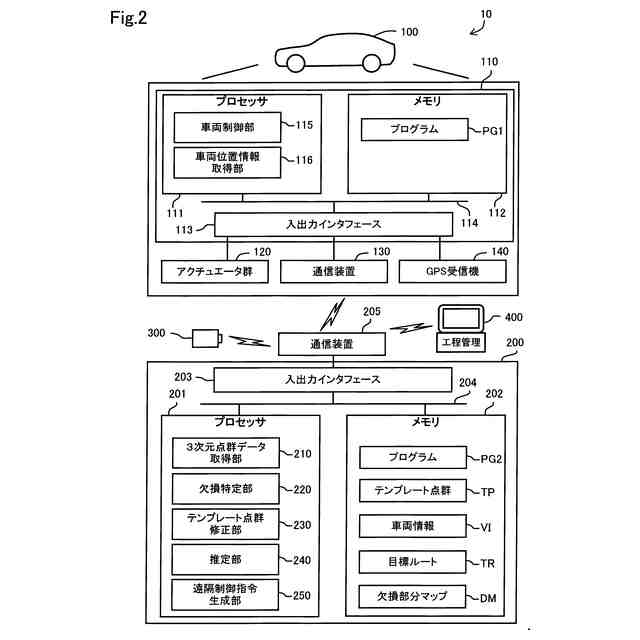
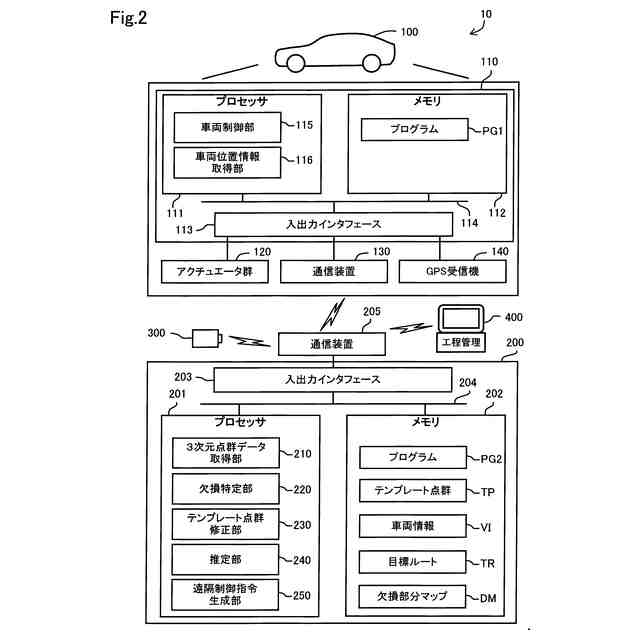
第1実施形態における車両と遠隔制御装置の構成を示すブロック図。
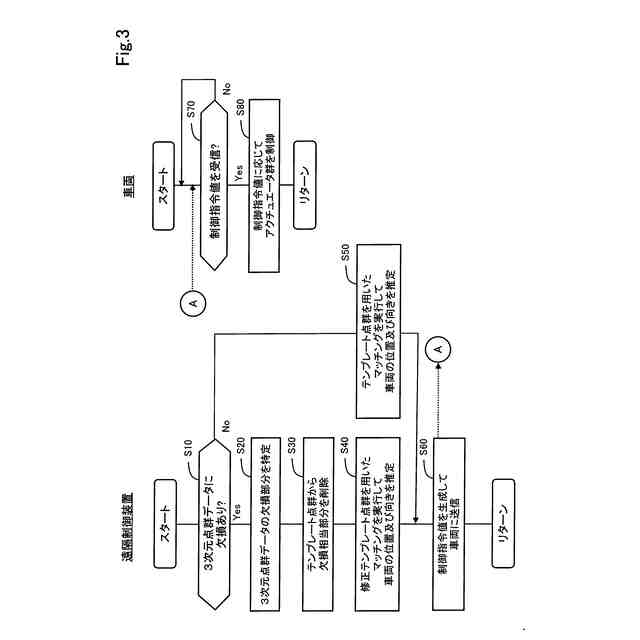
第1実施形態における遠隔制御の処理手順を示すフローチャート。
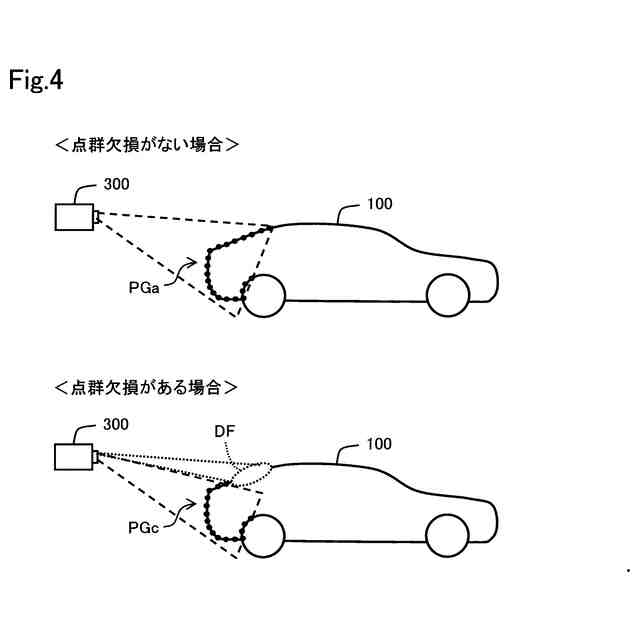
3次元点群データの欠損部分の例を示す説明図。
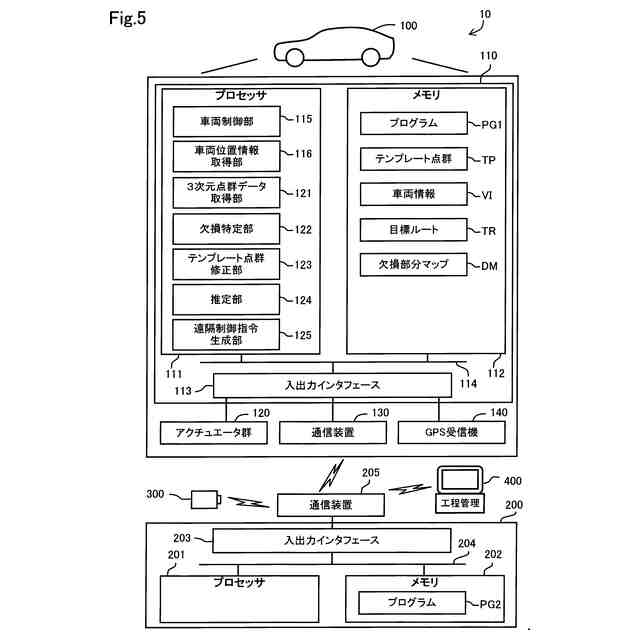
第2実施形態における車両と遠隔制御装置の構成を示すブロック図。
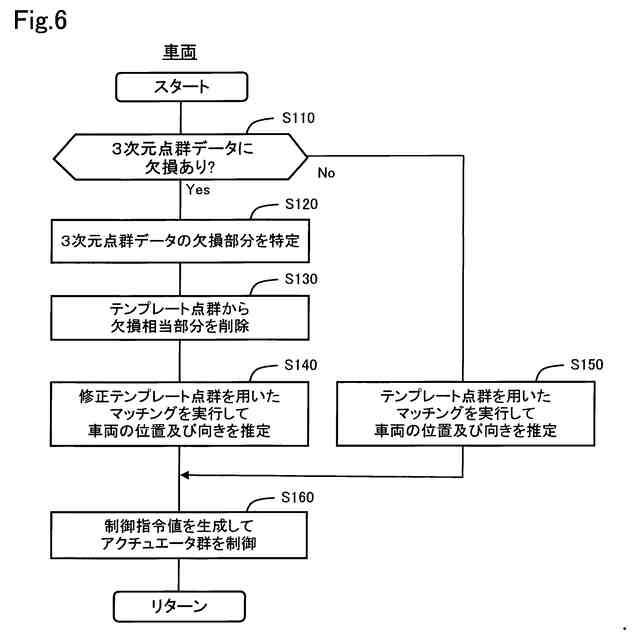
第2実施形態における車両制御の処理手順を示すフローチャート。
【発明を実施するための形態】
【0008】
A.第1実施形態
図1は、実施形態における遠隔制御システム10の構成を示す概念図である。遠隔制御システム10は、移動体としての1台以上の車両100と、車両100を遠隔制御するための制御指令を生成して車両100に送信する遠隔制御装置200と、車両100の3次元点群データを測定する複数の測距装置300と、車両100の製造工程の管理を行う工程管理装置400と、を備える。第1実施形態では、遠隔制御装置200が本開示の「制御装置」に相当する。
【0009】
車両100は、電気自動車(BEV:Battery Electric Vehicle)であることが好ましい。なお、移動体は、電気自動車に限られず、例えば、ガソリン自動車や、ハイブリッド自動車や、燃料電池自動車でもよい。移動体は、車両100に限られず、例えば、電動垂直離着陸機(いわゆる空飛ぶ自動車)でもよい。工場内の任意の位置は、基準座標系Σrのxyz座標値で表現される。
【0010】
本開示において、「移動体」は、移動し得る物体を意味する。車両は、車輪によって走行する車両であっても無限軌道によって走行する車両であってもよく、例えば、乗用車、トラック、バス、二輪車、四輪車、戦車、工事用車両などである。移動体が車両以外である場合には、本開示における「車両」「車」との表現を、適宜に「移動体」に置き換えることができ、「走行」との表現を、適宜に「移動」に置き換えることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
2か月前
積水樹脂株式会社
磁性シート
3か月前
ugo株式会社
移動体
2か月前
個人
車両レバー操作装置
3か月前
村田機械株式会社
産業機械
6日前
エイブリック株式会社
基準電圧回路
3か月前
株式会社ダイヘン
移動体
1か月前
神港テクノス株式会社
制御装置
1か月前
株式会社ダイヘン
移動体
1か月前
エイブリック株式会社
基準電圧回路装置
3か月前
トヨタ自動車株式会社
自律移動体
6日前
トヨタ自動車株式会社
自律移動体
2か月前
株式会社クボタ
作業車
6日前
トヨタ自動車株式会社
配送システム
1か月前
トヨタ自動車株式会社
搬送ロボット
2か月前
トヨタ自動車株式会社
搬送システム
2か月前
株式会社熊谷組
巡回ルート作成装置
3か月前
株式会社明電舎
車両
6日前
アズビル株式会社
パラメータ調整装置
15日前
株式会社フジキン
流体制御装置
1か月前
トヨタ自動車株式会社
位置推定システム
2か月前
トヨタ自動車株式会社
自律移動システム
2か月前
トヨタ自動車株式会社
ロボットシステム
14日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ロボットシステム
2か月前
トヨタ自動車株式会社
ロボットシステム
6日前
株式会社栗本鐵工所
操作装置
2か月前
株式会社FUJI
工作機械の操作システム
2か月前
キヤノン株式会社
情報処理装置
14日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
ローム株式会社
電源回路
1か月前
ローム株式会社
電源回路
1か月前
トヨタ自動車株式会社
群制御システム及び方法
1か月前
旭精機工業株式会社
監視データ処理装置
今日
株式会社豊田自動織機
無人走行体の走行制御システム
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ