TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024173374
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023091750
出願日
2023-06-02
発明の名称
移動体制御システム
出願人
株式会社日立製作所
代理人
弁理士法人開知
主分類
G05B
13/02 20060101AFI20241205BHJP(制御;調整)
要約
【課題】通過区間に応じた移動体の制御設計を容易に行うことができる移動体制御システムを提供する。
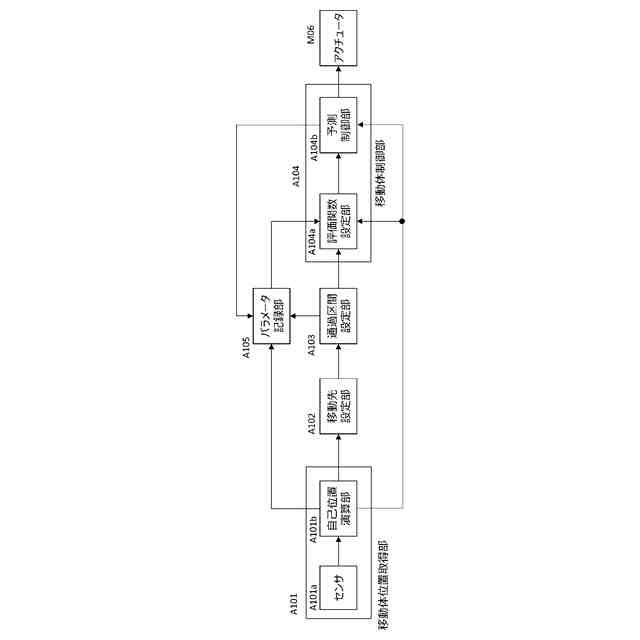
【解決手段】移動体制御システムは、移動体B100の位置を取得する移動体位置取得部A101と、移動体B100の移動先を設定する移動先設定部A102と、移動先までの移動体B100の通過区間を設定する通過区間設定部A103と、通過区間において移動体B100の制御を行う移動体制御部A104と、移動体B100の制御で利用される制御パラメータを記録するパラメータ記録部A105と、を備える。通過区間は、複数の基本形状の区間から構成される。それぞれの区間には、移動体B100が区間に入るときと区間から出るときの移動体B100の状態量で定義される境界条件と、制御パラメータ(例えば、重みパラメータQ、R)とが対応付けられる。パラメータ記録部A105は、移動体B100の位置を含む区間に対応する制御パラメータを移動体制御部A104に提供する。
【選択図】図1
特許請求の範囲
【請求項1】
移動体の位置を取得する移動体位置取得部と、
前記移動体の移動先を設定する移動先設定部と、
前記移動先までの前記移動体の通過区間を設定する通過区間設定部と、
前記通過区間において前記移動体の制御を行う移動体制御部と、
前記移動体の制御で利用される制御パラメータを記録するパラメータ記録部と、を備え、
前記通過区間は、複数の基本形状の区間から構成され、
それぞれの前記区間には、前記移動体が前記区間に入るときと前記区間から出るときの前記移動体の状態量で定義される境界条件と、前記制御パラメータとが対応付けられ、
前記パラメータ記録部は、前記移動体の位置を含む前記区間に対応する前記制御パラメータを前記移動体制御部に提供する
ことを特徴とする移動体制御システム。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の移動体制御システムであって、
前記移動体制御部は、
前記移動体の状態量の少なくとも1つの関数と前記移動体への制御入力の少なくとも1つの関数とそれぞれの前記関数に対応する重みパラメータから評価関数を設定する評価関数設定部と、
k(k=1,2,…)ステップの前記移動体の状態量と前記評価関数から前記移動体への制御入力を算出し、kステップの前記移動体の状態量と前記移動体への制御入力から(k+1)ステップの前記移動体の状態量を算出する予測制御部と、を備え、
前記制御パラメータは、前記重みパラメータであり、
前記パラメータ記録部は、前記移動体の状態量によって示される予測位置を含む前記区間に対応する前記重みパラメータを前記評価関数設定部に提供する
ことを特徴とする移動体制御システム。
【請求項3】
請求項1に記載の移動体制御システムであって、
前記通過区間を構成するそれぞれの前記区間は、制御対象である前記移動体の運動特性及び前記移動体が通過する通路のレイアウトを制約条件として選択される
ことを特徴とする移動体制御システム。
【請求項4】
請求項1に記載の移動体制御システムであって、
前記制御パラメータは、それぞれの前記区間における制御目的に応じて設定され、前記制御目的に対応付けられる
ことを特徴とする移動体制御システム。
【請求項5】
請求項1に記載の移動体制御システムであって、
複数の基本形状の前記区間のいずれかをユーザが選択する第1領域と、前記ユーザによって選択された前記区間を順次接続して前記通過区間を設計する第2領域と、前記ユーザによって選択された前記区間に対応する境界条件を前記ユーザが変更する第3領域と、から構成される画面を表示するユーザーインターフェースを備え、
前記通過区間設定部は、変更前の境界条件に対応する前記区間を、それと形状が同一であり、かつ変更後の境界条件に対応する区間に置き換える
ことを特徴とする移動体制御システム。
【請求項6】
請求項1に記載の移動体制御システムであって、
隣接する2つの前記区間が接続される位置において、一方の前記区間に対応する境界条件は、他方の前記区間に対応する境界条件と同一又は等価の条件である
ことを特徴とする移動体制御システム。
【請求項7】
請求項6に記載の移動体制御システムであって、
前記通過区間設定部が、
前記通過区間を構成するそれぞれの前記区間を選択する
ことを特徴とする移動体制御システム。
【請求項8】
請求項2に記載の移動体制御システムであって、
前記移動体と、サーバと、を備え、
前記移動先設定部、前記通過区間設定部、及び前記パラメータ記録部は、前記サーバに設けられ、
前記移動体位置取得部、前記評価関数設定部、及び前記予測制御部は、前記移動体又は前記サーバに設けられる
ことを特徴とする移動体制御システム。
【請求項9】
請求項1に記載の移動体制御システムであって、
前記移動体位置取得部、前記移動先設定部、前記通過区間設定部、前記移動体制御部、及び前記パラメータ記録部は、少なくともプロセッサから構成される
ことを特徴とする移動体制御システム。
【請求項10】
請求項8に記載の移動体制御システムであって、
前記移動先設定部、前記通過区間設定部、及び前記パラメータ記録部は、少なくとも前記サーバのプロセッサから構成され、
前記移動体位置取得部、前記評価関数設定部、及び前記予測制御部は、少なくとも前記移動体又は前記サーバのプロセッサから構成される
ことを特徴とする移動体制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体制御システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
物流倉庫の物品搬送や工場の工程間搬送の人手不足を解消するために、移動ロボット(AGV:Automated Guided Vehicle、AMR:Autonomous Mobile Robotなど)の導入が進んでいる。このような移動ロボットを導入するには、倉庫や工場内にロボットが移動可能な通路を設定(節点(ノード)と枝(ブランチ/エッジ)からなるグラフなどの作成)が必要になる。この設定が細かいほど、ロボットが選択可能な通路の自由度は高くなるため、より効率的な搬送が可能になる。一方で、設定作業に多くの工数が必要になる。さらに、前記の通路の設定作業は、倉庫や工場のレイアウトが変更するたびに必要になるため、詳細な通路を設定する作業は、倉庫や工場を管理する事業者に大きな負担(エンジニアリングコスト)を求めることになる。
【0003】
また、倉庫や工場では、通路上に物品が仮置きされることもあるため、正確な地図情報を取得すること自体が困難である。なお、この課題は他の産業領域でも共通になり得る。例えば、公道を走行する自動運転車両を扱う場合、道路工事による一時的な道路規制に伴い、パイロンや看板が設置されるといった環境変化が生じるため、正確な地図情報の取得は難しい。また、施工現場や鉱山などで運用される自動化建設機械(油圧ショベル、ホイールローダ、ダンプトラックなど)を扱う場合は、掘削作業に伴い、地図情報が時々刻々と変化する。
【0004】
このような課題に対して、特許文献1には、詳細な通路を設計することなく、ロボット(特許文献中ではビークル)が移動する経路を算出する方法が提示されている。より具体的には、特許文献1では、ロボットが障害物(建物内の柱や壁、自身以外のロボットなど)に接触せず、ロボットの現在位置とロボットの目標位置をできるだけ小さくするようにモデル予測制御の考えに従って、ロボットに対する制御入力(速度、角速度)を算出する。そして算出された制御入力を積分することで移動経路(位置、姿勢)を算出する。
【先行技術文献】
【特許文献】
【0005】
特開2022-134905号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1によれば、事前に倉庫や工場内に詳細な通路情報を設計せずに、ロボットが目標位置にたどり着く経路を算出することができる。また、ロボットのダイナミクスを考慮して障害物と接触しない移動計画を算出するため、事前に対象エリアを分割し、その分割区間内に複数のロボットが入らないように制御する排他制御方式に比べて、効率的な移動計画を生成し得る。
【0007】
しかしながら、特許文献1には、モデル予測制御の評価関数の構築方法に関する工夫の言及がない。より具体的には、特許文献1の評価関数(特許文献中の数式(8))の重み係数A1、A2、A3をどのように設計するかを言及していない。モデル予測制御によって実現される挙動はこれらのパラメータ(重み係数や予測区間)に大きく依存し、適切にパラメータが設計されていないと、所望の動作が実現できないことが知られている。そして、このパラメータ設計(調整)には、専門知識が必要とされる。さらに、制御システムが運用される現場にて、オペレータが試行錯誤によってパラメータを設計する必要があるため、システム運用時に多くの工数が必要になる。
【0008】
本発明の目的は、通過区間に応じた移動体の制御設計を容易に行うことができる移動体制御システムを提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明の移動体制御システムは、移動体の位置を取得する移動体位置取得部と、前記移動体の移動先を設定する移動先設定部と、前記移動先までの前記移動体の通過区間を設定する通過区間設定部と、前記通過区間において前記移動体の制御を行う移動体制御部と、前記移動体の制御で利用される制御パラメータを記録するパラメータ記録部と、を備え、前記通過区間は、複数の基本形状の区間から構成され、それぞれの前記区間には、前記移動体が前記区間に入るときと前記区間から出るときの前記移動体の状態量で定義される境界条件と、前記制御パラメータとが対応付けられ、前記パラメータ記録部は、前記移動体の位置を含む前記区間に対応する前記制御パラメータを前記移動体制御部に提供する。
【発明の効果】
【0010】
本発明によれば、通過区間に応じた移動体の制御設計を容易に行うことができる。上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
3か月前
ugo株式会社
移動体
3か月前
個人
無人作業システム
23日前
アズビル株式会社
制御装置
16日前
村田機械株式会社
産業機械
1か月前
神港テクノス株式会社
制御装置
2か月前
株式会社ダイヘン
移動体
2か月前
株式会社ダイヘン
移動体
2か月前
コフロック株式会社
流量制御装置
17日前
トヨタ自動車株式会社
自律移動体
3か月前
トヨタ自動車株式会社
自律移動体
1か月前
トヨタ自動車株式会社
配送システム
2か月前
株式会社丸和製作所
入力機器
16日前
株式会社クボタ
作業車
1か月前
株式会社フジキン
流体制御装置
2か月前
株式会社フジキン
流量制御装置
16日前
アズビル株式会社
パラメータ調整装置
1か月前
株式会社明電舎
車両
1か月前
株式会社豊田自動織機
荷役車両
9日前
トヨタ自動車株式会社
位置推定システム
3か月前
株式会社ダイフク
搬送設備
24日前
株式会社ダイフク
搬送設備
2か月前
株式会社村田製作所
温度補償回路
23日前
トヨタ自動車株式会社
自律移動システム
3か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社ダイフク
物品搬送設備
2日前
キヤノン株式会社
情報処理装置
1か月前
ローム株式会社
電源回路
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
24日前
ローム株式会社
電源回路
2か月前
株式会社ダイフク
物品搬送設備
24日前
ルネサスエレクトロニクス株式会社
半導体装置
17日前
旭精機工業株式会社
監視データ処理装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































