TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024132743
公報種別
公開特許公報(A)
公開日
2024-10-01
出願番号
2023043657
出願日
2023-03-17
発明の名称
移動体制御システムおよび移動体
出願人
株式会社藤千商会
代理人
個人
主分類
G05D
1/00 20240101AFI20240920BHJP(制御;調整)
要約
【課題】複数の移動体の各々と管理装置との間で通信可能なオンライン状態を維持する必要なく、任務の進行状況に応じて各移動体の行動を調整する。
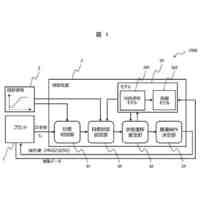
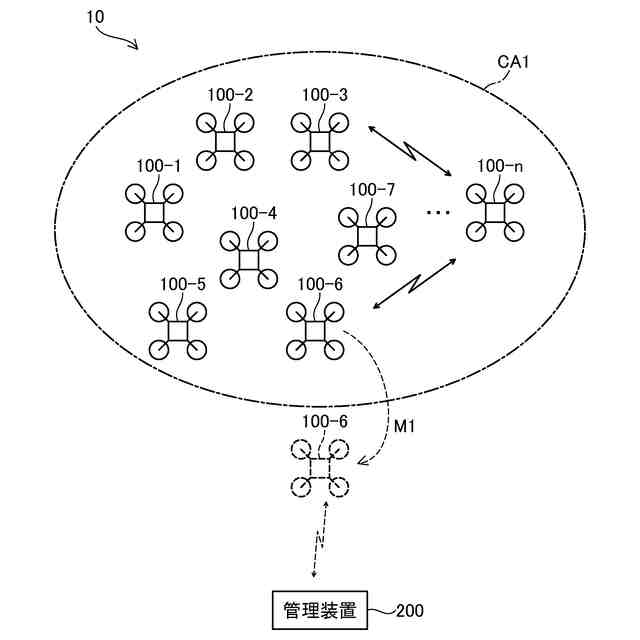
【解決手段】移動体制御システムにおける複数の移動体の各々は、複数の移動体が協働して遂行すべき任務の指示を管理装置から受け付け、自機の観測データと他機の観測データとを複数の移動体の間で共有し、共有される観測データに基づいて、任務を遂行するために複数の移動体の各々が取るべき行動を、複数の移動体で共通のアルゴリズムによって共通のタイミングで繰り返し判断し、共通のアルゴリズムによって判断される自機が取るべき行動に基づいて、自機の駆動デバイスおよびセンサモジュールの少なくとも一方を制御する。
【選択図】図6
特許請求の範囲
【請求項1】
各々が自律的に移動可能に構成された複数の移動体を備える移動体制御システムであって、
前記複数の移動体の各々は、
前記複数の移動体のうち当該移動体とは異なる他の移動体と無線通信を介してデータを送受信可能に構成された無線モジュールと、
当該移動体の位置および姿勢の少なくとも一方を変更可能に構成された機構を駆動する駆動デバイスと、
当該移動体において観測可能な物理的現象および化学的現象の少なくとも一方に基づく観測データを生成するセンサモジュールと、
プロセッサと、
プログラム命令を記憶するメモリと
を備え、前記プロセッサにより前記プログラム命令が実行されることによって、
当該移動体において生成される前記観測データと、前記他の移動体において生成される前記観測データとを、前記複数の移動体の間で前記無線モジュールを用いて共有し、
前記複数の移動体の間で共有される当該移動体および前記他の移動体の前記観測データに基づいて、前記複数の移動体が協働して遂行すべき任務を遂行するために前記複数の移動体の各々が取るべき行動を、前記複数の移動体で共通のアルゴリズムによって繰り返し判断し、
前記共通のアルゴリズムによって判断される当該移動体が取るべき行動に基づいて、当該移動体における前記駆動デバイスおよび前記センサモジュールの少なくとも一方を制御する、移動体制御システム。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の移動体制御システムであって、
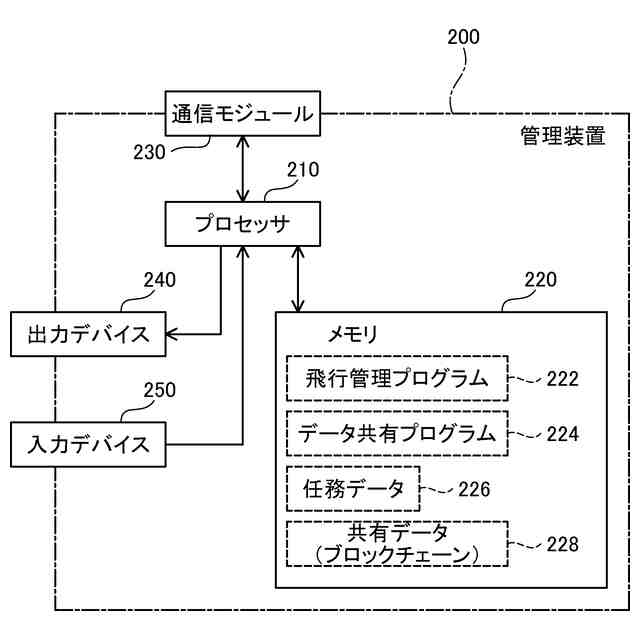
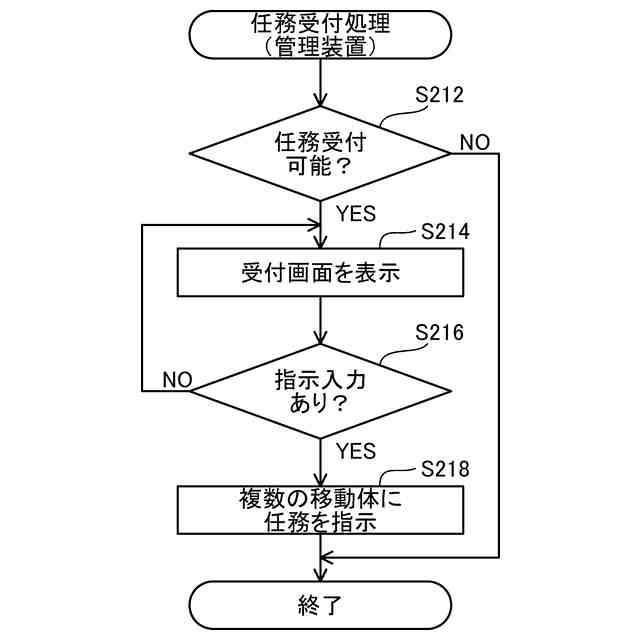
更に、前記複数の移動体の各々と通信可能に構成され、前記複数の移動体を管理する管理装置を備え、
前記共通のアルゴリズムによって判断される前記複数の移動体による行動は、前記管理装置が前記複数の移動体の各々と通信できないオフライン状態を許容し、前記オフライン状態となった後、前記複数の移動体の少なくとも1つの移動体が前記管理装置との通信再開を試行する行動を含む、移動体制御システム。
【請求項3】
請求項1に記載の移動体制御システムであって、
前記共通のアルゴリズムによって判断される前記複数の移動体による行動は、前記複数の移動体のうち少なくとも1つの移動体が、該移動体とは異なる別の移動体と通信できないオフライン状態を許容し、前記オフライン状態となった移動体が前記別の移動体との通信再開を試行する行動を含む、移動体制御システム。
【請求項4】
請求項1に記載の移動体制御システムであって、
前記共通のアルゴリズムによって判断される前記複数の移動体による行動は、前記複数の移動体のうち少なくとも1つの移動体によって、該移動体とは異なる別の移動体同士の間で通信可能となるようにデータを中継する行動を含む、移動体制御システム。
【請求項5】
請求項1に記載の移動体制御システムであって、
更に、前記複数の移動体の各々と通信可能に構成され、前記複数の移動体を管理する管理装置を備え、
前記共通のアルゴリズムによって判断される前記複数の移動体による行動は、前記複数の移動体のうち少なくとも1つの移動体によって、該移動体とは異なる別の移動体と前記管理装置との間で通信可能となるようにデータを中継する行動を含む、移動体制御システム。
【請求項6】
請求項1に記載の移動体制御システムであって、
前記共通のアルゴリズムによって判断される前記複数の移動体による行動は、前記複数の移動体のうち通信途絶した移動体によって通信途絶前に共有された前記観測データに基づいて、前記通信途絶した移動体を、該移動体とは異なる別の移動体によって捜索する行動を含む、移動体制御システム。
【請求項7】
請求項1に記載の移動体制御システムであって、
前記複数の移動体の各々は、前記プロセッサにより前記プログラム命令が実行されることによって、
前記複数の移動体で共通のタイミングで、前記複数の移動体の間で共有される当該移動体および前記他の移動体の前記観測データに基づいて、前記複数の移動体の各々が取るべき行動を前記共通のアルゴリズムによって繰り返し判断し、
前記複数の移動体における前記無線通信の品質に応じて、前記共通のアルゴリズムによって判断する次回の前記共通のタイミングを調整する、移動体制御システム。
【請求項8】
請求項1に記載の移動体制御システムであって、
前記複数の移動体の各々は、ブロックチェーンネットワークを構成するノードであり、前記複数の移動体の各々によって生成される前記観測データをブロックチェーンによって共有する、移動体制御システム。
【請求項9】
請求項8に記載の移動体制御システムであって、
更に、前記複数の移動体の各々と通信可能に構成され、前記複数の移動体を管理する管理装置を備え、
前記管理装置は、前記複数の移動体の各々と共に前記ブロックチェーンネットワークを構成するノードであり、前記複数の移動体の各々によって生成される前記観測データをブロックチェーンによって共有する、移動体制御システム。
【請求項10】
請求項1から請求項8までのいずれか一項に記載の移動体制御システムであって、
前記複数の移動体は、複数の無人飛行機であり、
前記任務は、捜索、災害調査、生態調査、空撮、配送、農薬散布、鳥獣駆除、測量、監視および偵察の少なくとも一つを含む、移動体制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書は、移動体制御システムおよび移動体に関する技術を開示する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1には、複数の移動体を制御する移動体制御システムにおいて、各々が自律的に移動可能に構成された複数の移動体(無人飛行機)が協働することによって、農薬散布、空撮、高所点検および輸送などの任務を遂行する技術について記載されている。特許文献1の移動体制御システムでは、複数の移動体を管理する管理装置が、各移動体の状態を示す状態情報を各移動体から受け取るとともに、それぞれの状態情報に基づいて各移動体に対して行動を指示する。
【先行技術文献】
【特許文献】
【0003】
特許第6931504号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のシステムでは、複数の移動体の各々と管理装置との間で通信可能な状態(オンライン状態)を維持しなければ、任務の進行状況に応じて各移動体の行動を調整できないという問題があった。
【課題を解決するための手段】
【0005】
本明細書に開示する技術は、以下の形態として実現できる。
【0006】
(1)本明細書に開示する一形態は、各々が自律的に移動可能に構成された複数の移動体を備える移動体制御システムである。この移動体制御システムにおいて、前記複数の移動体の各々は、前記複数の移動体のうち当該移動体とは異なる他の移動体と無線通信を介してデータを送受信可能に構成された無線モジュールと;当該移動体の位置および姿勢の少なくとも一方を変更可能に構成された機構を駆動する駆動デバイスと;当該移動体において観測可能な物理的現象および化学的現象の少なくとも一方に基づく観測データを生成するセンサモジュールと;プロセッサと;プログラム命令を記憶するメモリとを備える。前記複数の移動体の各々は、前記プロセッサにより前記プログラム命令が実行されることによって、当該移動体において生成される前記観測データと、前記他の移動体において生成される前記観測データとを、前記複数の移動体の間で前記無線モジュールを用いて共有し;前記複数の移動体の間で共有される当該移動体および前記他の移動体の前記観測データに基づいて、前記複数の移動体が協働して遂行すべき任務を遂行するために前記複数の移動体の各々が取るべき行動を、前記複数の移動体で共通のアルゴリズムによって繰り返し判断し;前記共通のアルゴリズムによって判断される当該移動体が取るべき行動に基づいて、当該移動体における前記駆動デバイスおよび前記センサモジュールの少なくとも一方を制御する。この形態の移動体制御システムによれば、複数の移動体の各々と管理装置との間で通信可能なオンライン状態を維持する必要なく、任務の進行状況に応じて各移動体の行動を調整できる。
【0007】
(2)上述した形態の移動体制御システムは、更に、前記複数の移動体の各々と通信可能に構成され、前記複数の移動体を管理する管理装置を備えてもよい。この移動体制御システムにおいて、前記共通のアルゴリズムによって判断される前記複数の移動体による行動は、前記管理装置が前記複数の移動体の各々と通信できないオフライン状態を許容し、前記オフライン状態となった後、前記複数の移動体の少なくとも1つの移動体が前記管理装置との通信再開を試行する行動を含んでもよい。この形態の移動体制御システムによれば、管理装置が複数の移動体の各々と通信できないオフライン状態になった場合であっても、少なくとも1つの移動体が管理装置との通信を再開することによって、その移動体がオフライン状態の間に別の移動体と共有した観測データを管理装置において利用できる。
【0008】
(3)上述した形態の移動体制御システムにおいて、前記共通のアルゴリズムによって判断される前記複数の移動体による行動は、前記複数の移動体のうち少なくとも1つの移動体が、該移動体とは異なる別の移動体と通信できないオフライン状態を許容し、前記オフライン状態となった移動体が前記別の移動体との通信再開を試行する行動を含んでもよい。この形態の移動体制御システムによれば、オフライン状態であった移動体が別の移動体との通信を再開することによって、オフライン状態の移動体においてオフライン状態の間に生成された観測データを、別の移動体との間で共有できる。
【0009】
(4)上述した形態の移動体制御システムにおいて、前記共通のアルゴリズムによって判断される前記複数の移動体による行動は、前記複数の移動体のうち少なくとも1つの移動体によって、該移動体とは異なる別の移動体同士の間で通信可能となるようにデータを中継する行動を含んでもよい。この形態の移動体制御システムによれば、移動体同士のオンライン状態を維持した複数の移動体による活動範囲を局所的に拡張できる。
【0010】
(5)上述した形態の移動体制御システムは、更に、前記複数の移動体の各々と通信可能に構成され、前記複数の移動体を管理する管理装置を備えてもよい。この移動体制御システムにおいて、前記共通のアルゴリズムによって判断される前記複数の移動体による行動は、前記複数の移動体のうち少なくとも1つの移動体によって、該移動体とは異なる別の移動体と前記管理装置との間で通信可能となるようにデータを中継する行動を含んでもよい。この形態の移動体制御システムによれば、少なくとも1つの移動体を介して別の移動体と管理装置との間の通信を維持した複数の移動体による活動範囲を拡張できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
3日前
ugo株式会社
移動体
3日前
積水樹脂株式会社
磁性シート
1か月前
個人
車両レバー操作装置
1か月前
エイブリック株式会社
基準電圧回路
1か月前
エイブリック株式会社
基準電圧回路装置
1か月前
トヨタ自動車株式会社
自律移動体
2日前
トヨタ自動車株式会社
搬送ロボット
16日前
トヨタ自動車株式会社
搬送システム
26日前
株式会社熊谷組
巡回ルート作成装置
1か月前
トヨタ自動車株式会社
自律移動システム
2日前
トヨタ自動車株式会社
位置推定システム
2日前
トヨタ自動車株式会社
ロボットシステム
26日前
株式会社栗本鐵工所
操作装置
17日前
株式会社FUJI
工作機械の操作システム
9日前
株式会社ダイフク
物品搬送設備
26日前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社栗本鐵工所
触覚提示装置
1か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
16日前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
本田技研工業株式会社
運転補助装置
1か月前
株式会社豊田自動織機
移動体制御システム
1か月前
トヨタ自動車株式会社
操作装置及び移動ロボット
24日前
横河電機株式会社
モジュール
1か月前
東レエンジニアリング株式会社
位置決め装置
1か月前
日本信号株式会社
自律走行ロボットシステム
1か月前
株式会社日立製作所
制御装置、制御方法
1か月前
愛知製鋼株式会社
異常検知方法及び異常検知システム
1か月前
愛知製鋼株式会社
異常検知方法及び異常検知システム
1か月前
株式会社NTTドコモ
総括制御装置
1か月前
トヨタ自動車株式会社
移動体及びその異物付着防止方法
26日前
NTN株式会社
自動搬送車の誘導システム
1か月前
株式会社デンソー
ペダル装置
16日前
ローム株式会社
カレントミラー回路
1か月前
アルプスアルパイン株式会社
回転操作装置
3日前
ネクサン
低温流体用の機械的圧力調整器
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ