TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024089189
公報種別
公開特許公報(A)
公開日
2024-07-03
出願番号
2022204395
出願日
2022-12-21
発明の名称
パラメータ探索装置および方法
出願人
アズビル株式会社
代理人
個人
主分類
G05B
13/02 20060101AFI20240626BHJP(制御;調整)
要約
【課題】実対象での繰り返し試行でパラメータの最適化を行なうケースについて効率を改善する。
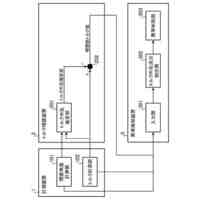
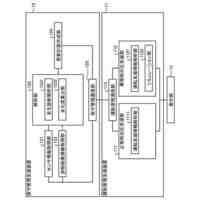
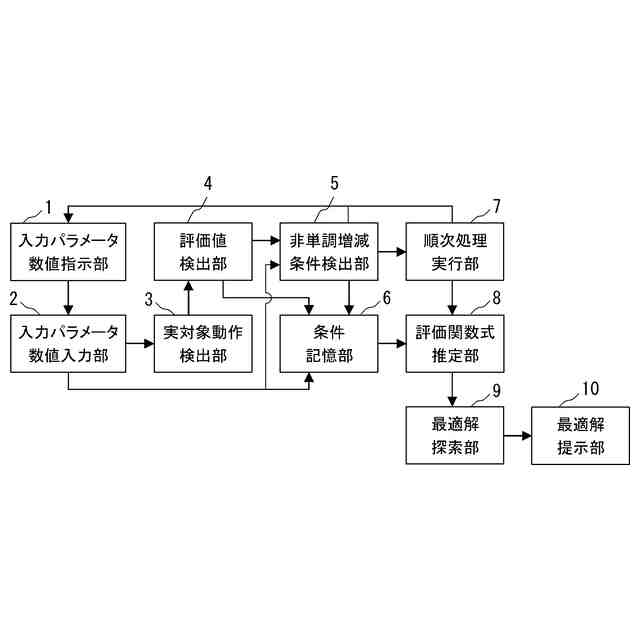
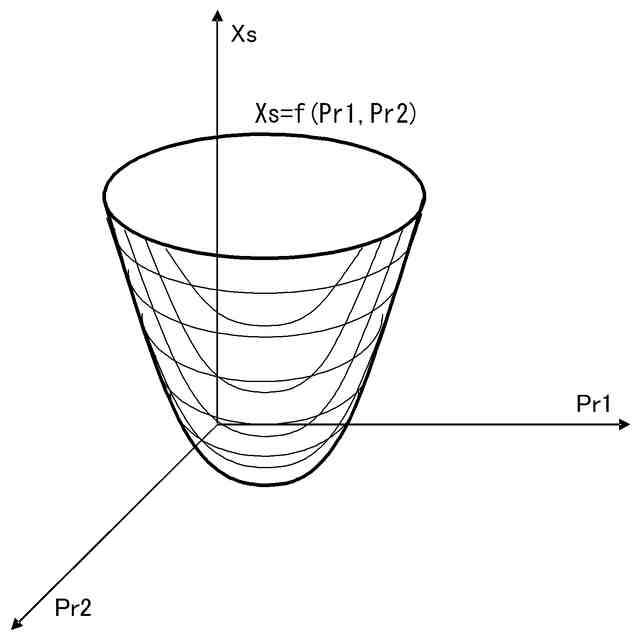
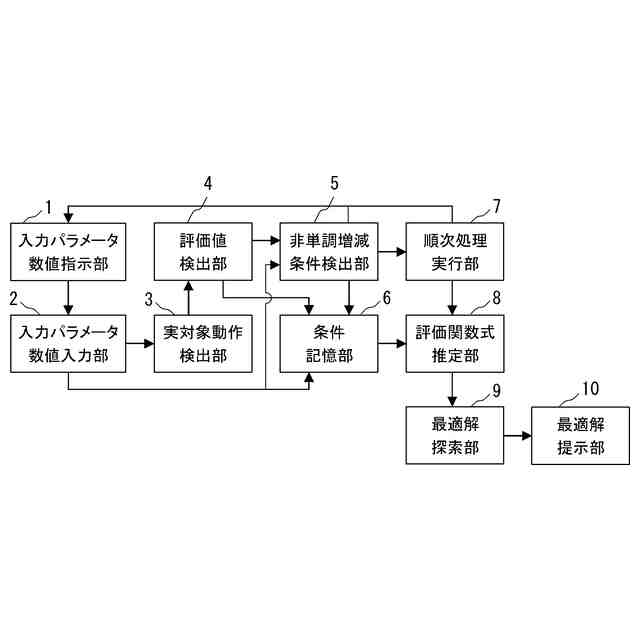
【解決手段】パラメータ探索装置は、複数の入力パラメータを実対象に入力したときに実対象から評価値を取得する評価値検出部4と、複数の入力パラメータのうち特定の入力パラメータのみを変化させたときに評価値が単調増減ではなくなる条件として、複数の入力パラメータと評価値との組み合わせを最低3点取得する非単調増減条件検出部5と、複数の入力パラメータのそれぞれを特定の入力パラメータとしたときの条件を取得し終えた後に、条件記憶部6に記憶された条件を参照して、入力パラメータを説明変数とし、評価値を目的変数とする評価関数式を推定する評価関数式推定部8と、評価関数式を用いて、評価値が極小または極大になる複数の入力パラメータの最適解を探索する最適解探索部9を備える。
【選択図】 図4
特許請求の範囲
【請求項1】
複数の入力パラメータのうち特定の1つの入力パラメータ以外のパラメータを固定値とし、前記特定の入力パラメータのみを変化させるように構成された入力パラメータ数値指示部と、
前記複数の入力パラメータを実対象に入力したときに前記実対象から得られる評価値、または前記評価値を求めるために必要な情報を検出するように構成された実対象動作検出部と、
前記実対象動作検出部による検出結果に基づいて前記評価値を取得するように構成された評価値検出部と、
前記特定の入力パラメータを変化させたときに前記評価値が単調増減ではなくなる条件として、前記複数の入力パラメータと前記評価値との組み合わせを最低3点取得するように構成された非単調増減条件検出部と、
前記非単調増減条件検出部が取得した条件を記憶するように構成された第1の記憶部と、
前記特定の入力パラメータと数値を固定する入力パラメータとの組み合わせを順次変更しながら、前記入力パラメータ数値指示部と前記実対象動作検出部と前記評価値検出部と前記非単調増減条件検出部とに処理を実行させ、前記複数の入力パラメータのそれぞれを前記特定の入力パラメータとしたときの前記条件を取得させるように構成された順次処理実行部と、
前記複数の入力パラメータのそれぞれを前記特定の入力パラメータとしたときの前記条件を取得し終えた後に、前記第1の記憶部に記憶された条件を参照して、前記入力パラメータを説明変数とし、前記評価値を目的変数とする評価関数式を推定するように構成された評価関数式推定部と、
前記評価関数式を用いて、前記評価値が極小または極大になる前記複数の入力パラメータの最適解を探索するように構成された最適解探索部と、
前記最適解を提示するように構成された最適解提示部とを備えることを特徴とするパラメータ探索装置。
続きを表示(約 2,200 文字)
【請求項2】
請求項1記載のパラメータ探索装置において、
前記特定の入力パラメータの初期値と、前記特定の入力パラメータの変化幅と、前記特定の入力パラメータ以外のパラメータとするときの固定値とが前記複数の入力パラメータのそれぞれについて前記入力パラメータ数値指示部に予め設定されていることを特徴とするパラメータ探索装置。
【請求項3】
請求項1または2記載のパラメータ探索装置において、
前記最適解を、2回目の条件検出処理において前記複数の入力パラメータのそれぞれを前記特定の入力パラメータとするときの初期値とし、前記入力パラメータ数値指示部と前記実対象動作検出部と前記評価値検出部と前記非単調増減条件検出部と前記順次処理実行部とによる1回目の条件検出処理における前記特定の入力パラメータの変化幅よりも小さい値を、2回目の条件検出処理における前記特定の入力パラメータの変化幅とする設定を、前記入力パラメータ数値指示部に対して行なうように構成された詳細探索指示部と、
前記詳細探索指示部による設定後の前記入力パラメータ数値指示部と前記実対象動作検出部と前記評価値検出部と前記非単調増減条件検出部と前記順次処理実行部とによる前記2回目の条件検出処理において前記非単調増減条件検出部が取得した条件を記憶するように構成された第2の記憶部と、
前記2回目の条件検出処理において前記複数の入力パラメータのそれぞれを前記特定の入力パラメータとしたときの前記条件を取得し終えた後に、前記評価関数式推定部と前記最適解探索部と前記最適解提示部とに対し、前記第2の記憶部の記憶内容のみで処理を実行させると共に、前記第1の記憶部の記憶内容と前記第2の記憶部の記憶内容の両方を併せた内容で処理を実行させるように構成された詳細探索処理部とをさらに備えることを特徴とするパラメータ探索装置。
【請求項4】
複数の入力パラメータのうち特定の1つの入力パラメータ以外のパラメータを固定値とし、前記特定の入力パラメータのみを変化させる第1のステップと、
前記複数の入力パラメータを実対象に入力したときに前記実対象から得られる評価値、または前記評価値を求めるために必要な情報を検出する第2のステップと、
前記第2のステップの検出結果に基づいて前記評価値を取得する第3のステップと、
前記特定の入力パラメータを変化させたときに前記評価値が単調増減ではなくなる条件として、前記複数の入力パラメータと前記評価値との組み合わせを最低3点取得して第1の記憶部に記憶させる第4のステップと、
前記特定の入力パラメータと数値を固定する入力パラメータとの組み合わせを順次変更しながら、前記第1のステップと前記第2のステップと前記第3のステップと前記第4のステップの処理を実行し、前記複数の入力パラメータのそれぞれを前記特定の入力パラメータとしたときの前記条件を取得する第5のステップと、
前記複数の入力パラメータのそれぞれを前記特定の入力パラメータとしたときの前記条件を取得し終えた後に、前記第1の記憶部に記憶された条件を参照して、前記入力パラメータを説明変数とし、前記評価値を目的変数とする評価関数式を推定する第6のステップと、
前記評価関数式を用いて、前記評価値が極小または極大になる前記複数の入力パラメータの最適解を探索する第7のステップと、
前記最適解を提示する第8のステップとを含むことを特徴とするパラメータ探索方法。
【請求項5】
請求項4記載のパラメータ探索方法において、
前記特定の入力パラメータの初期値と、前記特定の入力パラメータの変化幅と、前記特定の入力パラメータ以外のパラメータとするときの固定値とが前記複数の入力パラメータのそれぞれについて予め設定されていることを特徴とするパラメータ探索方法。
【請求項6】
請求項4または5記載のパラメータ探索方法において、
前記最適解を、2回目の条件検出処理において前記複数の入力パラメータのそれぞれを前記特定の入力パラメータとするときの初期値とし、前記第1のステップと前記第2のステップと前記第3のステップと前記第4のステップと前記第5のステップとによる1回目の条件検出処理における前記特定の入力パラメータの変化幅よりも小さい値を、2回目の条件検出処理における前記特定の入力パラメータの変化幅とする設定を行なう第9のステップと、
前記第9のステップによる設定後の前記第1のステップと前記第2のステップと前記第3のステップと前記第4のステップと前記第5のステップとによる前記2回目の条件検出処理において前記第4のステップで取得した条件を第2の記憶部に記憶させる第10のステップと、
前記2回目の条件検出処理において前記複数の入力パラメータのそれぞれを前記特定の入力パラメータとしたときの前記条件を取得し終えた後に、前記第2の記憶部の記憶内容のみで前記第6のステップと前記第7のステップと前記第8のステップの処理を実行すると共に、前記第1の記憶部の記憶内容と前記第2の記憶部の記憶内容の両方を併せた内容で前記第6のステップと前記第7のステップと前記第8のステップの処理を実行する第11のステップとをさらに含むことを特徴とするパラメータ探索方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、実対象にパラメータを入力してパラメータの最適解を探索する技術に係り、特に最適化の効率を改善することができるパラメータ探索装置および方法に関するものである。
続きを表示(約 3,800 文字)
【背景技術】
【0002】
代表的なフィードバック制御であるPID制御のPIDパラメータの調整を想定し、制御対象モデル生成方法および制御パラメータ調整方法が提案されている(特許文献1)。そのモデル生成処理においては、Powell法の最適解探索アルゴリズムが具体例として示されている。この最適解探索アルゴリズムを採用する場合、時系列データからのモデリングは1回の実験的試行で済み、生成したモデルを利用してPIDパラメータを調整(最適化)する。つまり、実験的試行自体は1回で済み、繰り返し行うべき試行錯誤はコンピュータ上での処理だけになるので、効率的な調整(最適化)が可能になる。
【0003】
しかしながら、モデル生成が困難な対象、あるいはモデル生成のためのデータ収集が困難な対象では、実対象での繰り返し試行で最適化を行なわざるを得ない。すなわち、実験的試行が1回では済ませられないケースもある。そして、そのような実対象での繰り返し試行で最適化を行なうケースであっても、手順が簡易であること、すなわち効率が良いことが好ましいので、改善が求められている。
【先行技術文献】
【特許文献】
【0004】
特開2004-38428号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、上記課題を解決するためになされたもので、実対象での繰り返し試行でパラメータの最適化を行なうケースについて最適化の効率を改善するためのパラメータ探索装置および方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
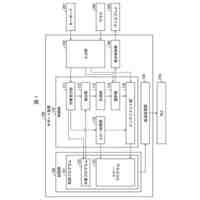
本発明のパラメータ探索装置は、複数の入力パラメータのうち特定の1つの入力パラメータ以外のパラメータを固定値とし、前記特定の入力パラメータのみを変化させるように構成された入力パラメータ数値指示部と、前記複数の入力パラメータを実対象に入力したときに前記実対象から得られる評価値、または前記評価値を求めるために必要な情報を検出するように構成された実対象動作検出部と、前記実対象動作検出部による検出結果に基づいて前記評価値を取得するように構成された評価値検出部と、前記特定の入力パラメータを変化させたときに前記評価値が単調増減ではなくなる条件として、前記複数の入力パラメータと前記評価値との組み合わせを最低3点取得するように構成された非単調増減条件検出部と、前記非単調増減条件検出部が取得した条件を記憶するように構成された第1の記憶部と、前記特定の入力パラメータと数値を固定する入力パラメータとの組み合わせを順次変更しながら、前記入力パラメータ数値指示部と前記実対象動作検出部と前記評価値検出部と前記非単調増減条件検出部とに処理を実行させ、前記複数の入力パラメータのそれぞれを前記特定の入力パラメータとしたときの前記条件を取得させるように構成された順次処理実行部と、前記複数の入力パラメータのそれぞれを前記特定の入力パラメータとしたときの前記条件を取得し終えた後に、前記第1の記憶部に記憶された条件を参照して、前記入力パラメータを説明変数とし、前記評価値を目的変数とする評価関数式を推定するように構成された評価関数式推定部と、前記評価関数式を用いて、前記評価値が極小または極大になる前記複数の入力パラメータの最適解を探索するように構成された最適解探索部と、前記最適解を提示するように構成された最適解提示部とを備えることを特徴とするものである。
【0007】
また、本発明のパラメータ探索装置の1構成例は、前記特定の入力パラメータの初期値と、前記特定の入力パラメータの変化幅と、前記特定の入力パラメータ以外のパラメータとするときの固定値とが前記複数の入力パラメータのそれぞれについて前記入力パラメータ数値指示部に予め設定されていることを特徴とするものである。
また、本発明のパラメータ探索装置の1構成例は、前記最適解を、2回目の条件検出処理において前記複数の入力パラメータのそれぞれを前記特定の入力パラメータとするときの初期値とし、前記入力パラメータ数値指示部と前記実対象動作検出部と前記評価値検出部と前記非単調増減条件検出部と前記順次処理実行部とによる1回目の条件検出処理における前記特定の入力パラメータの変化幅よりも小さい値を、2回目の条件検出処理における前記特定の入力パラメータの変化幅とする設定を、前記入力パラメータ数値指示部に対して行なうように構成された詳細探索指示部と、前記詳細探索指示部による設定後の前記入力パラメータ数値指示部と前記実対象動作検出部と前記評価値検出部と前記非単調増減条件検出部と前記順次処理実行部とによる前記2回目の条件検出処理において前記非単調増減条件検出部が取得した条件を記憶するように構成された第2の記憶部と、前記2回目の条件検出処理において前記複数の入力パラメータのそれぞれを前記特定の入力パラメータとしたときの前記条件を取得し終えた後に、前記評価関数式推定部と前記最適解探索部と前記最適解提示部とに対し、前記第2の記憶部の記憶内容のみで処理を実行させると共に、前記第1の記憶部の記憶内容と前記第2の記憶部の記憶内容の両方を併せた内容で処理を実行させるように構成された詳細探索処理部とをさらに備えることを特徴とするものである。
【0008】
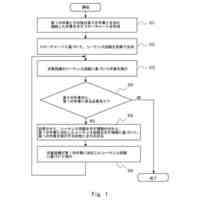
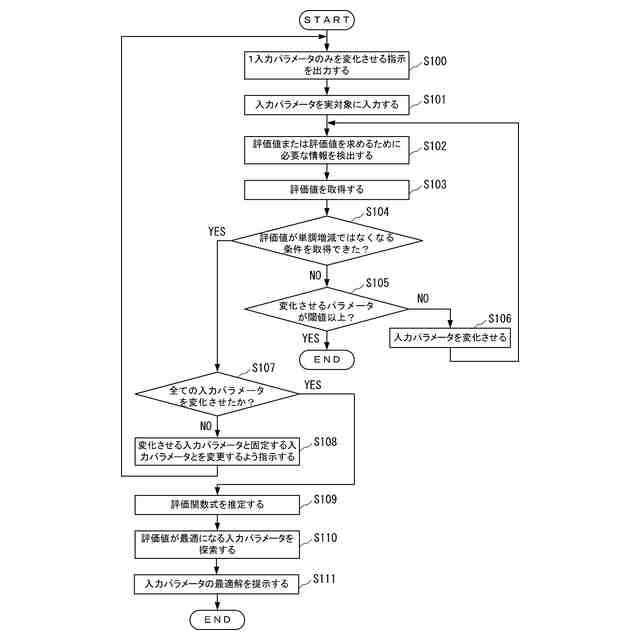
また、本発明のパラメータ探索方法は、複数の入力パラメータのうち特定の1つの入力パラメータ以外のパラメータを固定値とし、前記特定の入力パラメータのみを変化させる第1のステップと、前記複数の入力パラメータを実対象に入力したときに前記実対象から得られる評価値、または前記評価値を求めるために必要な情報を検出する第2のステップと、前記第2のステップの検出結果に基づいて前記評価値を取得する第3のステップと、前記特定の入力パラメータを変化させたときに前記評価値が単調増減ではなくなる条件として、前記複数の入力パラメータと前記評価値との組み合わせを最低3点取得して第1の記憶部に記憶させる第4のステップと、前記特定の入力パラメータと数値を固定する入力パラメータとの組み合わせを順次変更しながら、前記第1のステップと前記第2のステップと前記第3のステップと前記第4のステップの処理を実行し、前記複数の入力パラメータのそれぞれを前記特定の入力パラメータとしたときの前記条件を取得する第5のステップと、前記複数の入力パラメータのそれぞれを前記特定の入力パラメータとしたときの前記条件を取得し終えた後に、前記第1の記憶部に記憶された条件を参照して、前記入力パラメータを説明変数とし、前記評価値を目的変数とする評価関数式を推定する第6のステップと、前記評価関数式を用いて、前記評価値が極小または極大になる前記複数の入力パラメータの最適解を探索する第7のステップと、前記最適解を提示する第8のステップとを含むことを特徴とするものである。
【0009】
また、本発明のパラメータ探索方法の1構成例は、前記特定の入力パラメータの初期値と、前記特定の入力パラメータの変化幅と、前記特定の入力パラメータ以外のパラメータとするときの固定値とが前記複数の入力パラメータのそれぞれについて予め設定されていることを特徴とするものである。
また、本発明のパラメータ探索方法の1構成例は、前記最適解を、2回目の条件検出処理において前記複数の入力パラメータのそれぞれを前記特定の入力パラメータとするときの初期値とし、前記第1のステップと前記第2のステップと前記第3のステップと前記第4のステップと前記第5のステップとによる1回目の条件検出処理における前記特定の入力パラメータの変化幅よりも小さい値を、2回目の条件検出処理における前記特定の入力パラメータの変化幅とする設定を行なう第9のステップと、前記第9のステップによる設定後の前記第1のステップと前記第2のステップと前記第3のステップと前記第4のステップと前記第5のステップとによる前記2回目の条件検出処理において前記第4のステップで取得した条件を第2の記憶部に記憶させる第10のステップと、前記2回目の条件検出処理において前記複数の入力パラメータのそれぞれを前記特定の入力パラメータとしたときの前記条件を取得し終えた後に、前記第2の記憶部の記憶内容のみで前記第6のステップと前記第7のステップと前記第8のステップの処理を実行すると共に、前記第1の記憶部の記憶内容と前記第2の記憶部の記憶内容の両方を併せた内容で前記第6のステップと前記第7のステップと前記第8のステップの処理を実行する第11のステップとをさらに含むことを特徴とするものである。
【発明の効果】
【0010】
本発明によれば、入力パラメータ数値指示部と実対象動作検出部と評価値検出部と非単調増減条件検出部と第1の記憶部と順次処理実行部と評価関数式推定部と最適解探索部と最適解提示部とを設けることにより、ローカルミニマムが存在しない形状の評価関数が設計可能なケースであれば、入力パラメータの最適解を探索する効率を改善することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
流量センサ
2日前
アズビル株式会社
検出システム
24日前
アズビル株式会社
パラメータ探索装置および方法
2日前
アズビル株式会社
異常検知装置及び異常検知方法
3日前
アズビル株式会社
保護膜の形成方法、保護膜、及び、センサ
15日前
エイブリック株式会社
基準電流源
25日前
株式会社クボタ
作業車
1か月前
アズビル株式会社
流量制御システム
1か月前
トヨタ自動車株式会社
自動作業装置
1か月前
オムロン株式会社
開発装置、開発方法
1か月前
トヨタ自動車株式会社
設備の制御方法
1日前
株式会社ダイフク
搬送設備
1か月前
横河電機株式会社
電流源回路
1日前
マキノジェイ株式会社
工作機械
24日前
住友重機械工業株式会社
自律走行台車
2日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社デンソー
過電流検出回路
1か月前
個人
ペダル操作検知装置
1日前
三菱電機株式会社
管理システムおよび管理方法
1日前
アズビル株式会社
パラメータ探索装置および方法
2日前
日置電機株式会社
信号出力装置および抵抗測定装置
1か月前
オムロン株式会社
サポート装置およびサポート方法
24日前
村田機械株式会社
無人搬送車システム
1か月前
トヨタ自動車株式会社
充電装置
1日前
日本精工株式会社
制御システムおよび制御方法
1か月前
横河電機株式会社
ロボット管理システム
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
CKD日機電装株式会社
カスケード形PID制御系の設計法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
ローム株式会社
電圧生成回路
22日前
日本精工株式会社
制御システムおよび制御方法
1か月前
株式会社デンソー
ペダル装置
24日前
シャープ株式会社
走行システム及び走行方法
1か月前
オークマ株式会社
工作機械の制御方法及び制御装置
10日前
富士電機株式会社
予測装置、予測方法及びプログラム
1か月前
丸北研磨株式会社
稼働状況管理システム
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ