TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024087822
公報種別
公開特許公報(A)
公開日
2024-07-02
出願番号
2022202692
出願日
2022-12-20
発明の名称
異常検知装置及び異常検知方法
出願人
アズビル株式会社
代理人
弁理士法人山王内外特許事務所
主分類
B25J
19/06 20060101AFI20240625BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】トルク補償処理におけるトルク外乱成分の低減性能の劣化を検知可能とする。
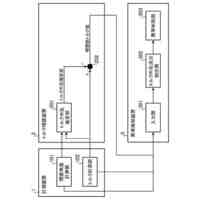
【解決手段】関節角度計測値又は関節角速度計測値のうちの少なくとも一方、トルク計測値、並びに、当該トルク計測値に対して減速機の回転機構に由来するトルク外乱による誤差を補償した補償後トルク値を取得する入力部301と、入力部301による取得結果に基づいて、トルク計測値からトルク外乱成分を抽出するとともに、補償後トルク値からトルク外乱成分を抽出するトルク外乱成分抽出部302と、トルク外乱成分抽出部302による抽出結果に基づいて、補償後トルク値の異常有無を判別する異常判別部303とを備えた。
【選択図】図1
特許請求の範囲
【請求項1】
関節角度計測値又は関節角速度計測値のうちの少なくとも一方、トルク計測値、並びに、当該トルク計測値に対して減速機の回転機構に由来するトルク外乱による誤差を補償した補償後トルク値を取得する入力部と、
前記入力部による取得結果に基づいて、トルク計測値からトルク外乱成分を抽出するとともに、補償後トルク値からトルク外乱成分を抽出するトルク外乱成分抽出部と、
前記トルク外乱成分抽出部による抽出結果に基づいて、補償後トルク値の異常有無を判別する異常判別部と
を備えた異常検知装置。
続きを表示(約 1,300 文字)
【請求項2】
前記トルク外乱成分抽出部は、デジタルフィルタを用い、トルク計測値からトルク外乱の周波数帯域の成分を抽出するとともに、補償後トルク値からトルク外乱の周波数帯域の成分を抽出する
ことを特徴とする請求項1記載の異常検知装置。
【請求項3】
前記トルク外乱成分抽出部は、関節角速度計測値又は関節角度計測値から計算された関節角速度に比例して、抽出対象とするトルク外乱の周波数帯域を動的に変化させる
ことを特徴とする請求項2記載の異常検知装置。
【請求項4】
前記トルク外乱成分抽出部は、
トルクの計測値から、負荷トルクと相関のある負荷トルクの指標値を推定する負荷トルク指標値推定部と、
前記負荷トルク指標値推定部により推定された負荷トルクの指標値を説明変数として、回帰推論により、負荷トルクによるトルク外乱の周期の変動量を推定するトルク外乱周期変動量推定部と、
前記トルク外乱周期変動量推定部により推定されたトルク外乱の周期の変動量に応じて、抽出対象とするトルク外乱の周波数帯域の中心周波数をシフトさせる周波数帯域設定部とを有する
ことを特徴とする請求項2記載の異常検知装置。
【請求項5】
前記トルク外乱成分抽出部は、
トルクの計測値から、負荷トルクと相関のある負荷トルクの指標値を推定する負荷トルク指標値推定部と、
前記負荷トルク指標値推定部により推定された負荷トルクの指標値を説明変数として、回帰推論により、負荷トルクによるトルク外乱の周期の変動量を推定するトルク外乱周期変動量推定部と、
前記トルク外乱周期変動量推定部により推定されたトルク外乱の周期の変動量に応じて、抽出対象とするトルク外乱の周波数帯域の中心周波数をシフトさせる周波数帯域設定部とを有する
ことを特徴とする請求項3記載の異常検知装置。
【請求項6】
前記異常判別部は、
前記トルク外乱成分抽出部により抽出されたトルク計測値におけるトルク外乱成分の振幅の代表値と、当該トルク外乱成分抽出部により抽出された補償後トルク値におけるトルク外乱成分の振幅の代表値とを比較し、当該トルク計測値におけるトルク外乱成分の振幅の代表値に対し、当該補償後トルク値におけるトルク外乱成分の振幅の代表値の方が大きいと判定した場合に、当該補償後トルク値に異常が有ると判定する
ことを特徴とする請求項1から請求項5のうちの何れか1項記載の異常検知装置。
【請求項7】
入力部が、関節角度計測値又は関節角速度計測値のうちの少なくとも一方、トルク計測値、並びに、当該トルク計測値に対して減速機の回転機構に由来するトルク外乱による誤差を補償した補償後トルク値を取得するステップと、
トルク外乱成分抽出部が、前記入力部による取得結果に基づいて、トルク計測値からトルク外乱成分を抽出するとともに、補償後トルク値からトルク外乱成分を抽出するステップと、
異常判別部が、前記トルク外乱成分抽出部による抽出結果に基づいて、補償後トルク値の異常有無を判別するステップと
を有する異常検知方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットアームに取付けられたトルクセンサにより計測されたトルクに対し、当該ロボットアームが有する減速機の回転機構に由来するトルク外乱による誤差の補償を行うトルク補償処理に対して異常検知を行う異常検知装置及び異常検知方法に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
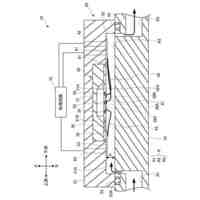
従来、各関節にトルクセンサが取付けられ、このトルクセンサにより計測されたトルク、又は、当該トルクから推定したアーム先端における力を制御するロボットアームが知られている(例えば特許文献1参照)。
【0003】
ここで、ロボットアームが減速機を用いている場合、トルクセンサにより計測されたトルクには、減速機の機械的変化がトルク外乱となって含まれることがある。このトルク外乱は、減速機が歯車のような回転機構を持つことに起因しており、例えばロボットアームで使われることが多い波動歯車を持つ減速機でも起こり得る誤差である。
ここでは、以下、単にトルク外乱と記述した場合は、減速機の回転機構に由来するトルク外乱を指すものとする。
【0004】
このトルク外乱は、ロボットアームの関節角度に対して周期的な外乱であり、ロボットアームの関節角が僅かに変わっても大きく変わることがあり、トルク制御及び力制御の性能を劣化させる。
【0005】
これに対し、トルク外乱を抑制する機械的な機構を設計することは可能である。しかしながら、この場合、機構が複雑になり、また、コストも上昇する。
【0006】
そのため、トルク外乱による誤差をソフトウェアで補償するトルク補償処理が行われる。トルク補償処理は、トルクセンサにより計測されたトルクからトルク外乱の推定値を減算することで、補償後トルク値を求める処理である。
なお、トルク外乱の推定値の推定方法としては、例えば、トルク外乱の推定値を回帰モデルで推論する方式がある(例えば特許文献2参照)。
【先行技術文献】
【特許文献】
【0007】
特開2006-000955号公報
特開2021-10983号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、回帰モデルの特性上、回帰パラメータの学習に用いた条件に対し、異なる条件でトルク外乱を推定すると誤差は大きくなる。上記回帰パラメータの学習に用いた条件としては、例えば、各説明変数の値域の組み合わせ、又は、所定条件で精度が良くなるよう設定した重みが挙げられる。
【0009】
また、ユーザ又はエンジニアのヒューマンエラーにより、運用条件と異なる条件で学習した回帰パラメータをトルク補償装置に設定してしまい、トルク外乱の推定誤差が大きくなる場合もある。
【0010】
トルク外乱の推定誤差が大きいと、トルク補償処理の性能の劣化を招くだけでなく、トルク補償処理によりトルク外乱成分を低減するどころか却ってトルク外乱成分を強調しかねない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
流量センサ
5日前
アズビル株式会社
パラメータ探索装置および方法
5日前
アズビル株式会社
異常検知装置及び異常検知方法
6日前
アズビル株式会社
保護膜の形成方法、保護膜、及び、センサ
18日前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
3か月前
株式会社ツノダ
挟持工具
4か月前
川崎重工業株式会社
ハンド
4か月前
日東工器株式会社
衝撃工具
11日前
株式会社右川ゴム製造所
把持装置
3か月前
学校法人立命館
ロボットハンド
4か月前
株式会社マキタ
動力工具
1か月前
川崎重工業株式会社
罫書用治具
28日前
学校法人立命館
グリッパ
3か月前
個人
プーリーキー抜き治具
3か月前
トヨタ自動車株式会社
ハンド構造
18日前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
CKD株式会社
電動把持装置
2か月前
東京都公立大学法人
ロボットハンド
2か月前
株式会社不二越
予測システム
4か月前
宮川工機株式会社
板状部品移動装置
1か月前
国立大学法人山形大学
二重関節機構
1か月前
株式会社ダイヘン
画像生成装置
3か月前
株式会社ダイヘン
情報処理装置
3か月前
株式会社中村製作所
トルクドライバー
4か月前
工機ホールディングス株式会社
作業機
27日前
工機ホールディングス株式会社
作業機
5か月前
工機ホールディングス株式会社
作業機
5か月前
工機ホールディングス株式会社
作業機
27日前
工機ホールディングス株式会社
作業機
27日前
工機ホールディングス株式会社
作業機
4か月前
株式会社ダイヘン
画像生成装置
3か月前
工機ホールディングス株式会社
作業機
1か月前
小倉クラッチ株式会社
ロボットハンド
6か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ