TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024044796
公報種別
公開特許公報(A)
公開日
2024-04-02
出願番号
2022150544
出願日
2022-09-21
発明の名称
画像生成装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
B25J
9/22 20060101AFI20240326BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットの配置検討を行うための画像生成装置を提供する。
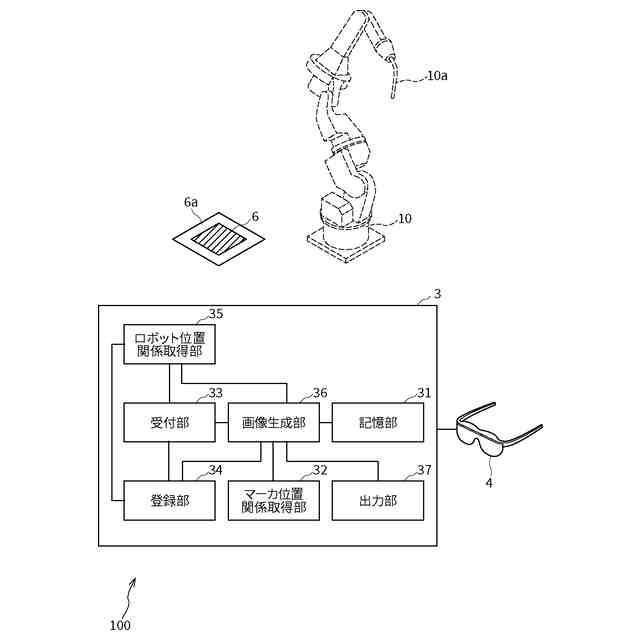
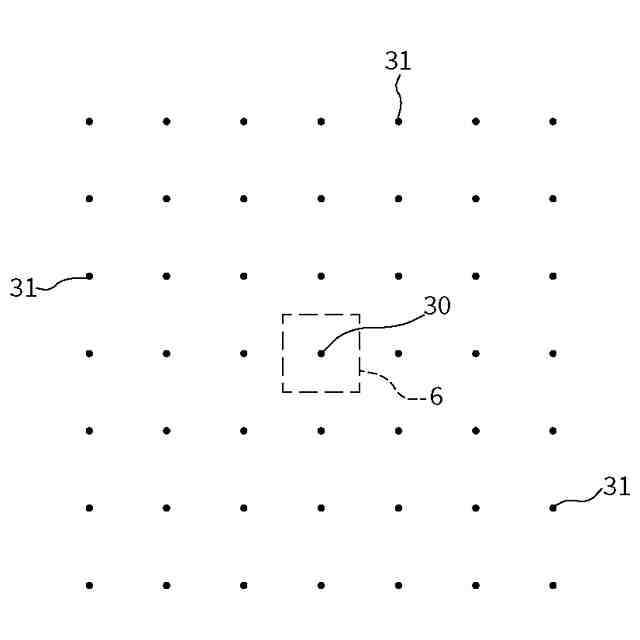
【解決手段】画像生成装置3は、基準マーカ6と表示装置4の相対的な位置関係を用いて仮想ロボットの3次元モデルの表示画像を生成する画像生成部36と、表示画像を表示装置4に出力する出力部37と、登録指示の受け付けに応じて仮想ロボットのエンドエフェクタの位置及び姿勢を登録する登録部34と、移動指示の受け付けに応じて基準マーカ6と仮想ロボットの新たな位置関係を取得するロボット位置関係取得部35とを備え、画像生成部36は、移動指示に応じて、基準マーカ6と新たな位置関係となるように配置された、エンドエフェクタが登録された位置及び姿勢である仮想ロボットの3次元モデルの表示画像を生成する。このような構成により、エンドエフェクタの位置及び姿勢を固定した状態で、仮想ロボットの配置位置を検討することができる。
【選択図】図1
特許請求の範囲
【請求項1】
実ロボットに対応する仮想ロボットの3次元モデルが記憶される記憶部と、
実環境に存在する基準マーカと、画像を実環境の画像または実環境そのものに重ねて表示する表示装置との相対的な位置関係を取得するマーカ位置関係取得部と、
前記仮想ロボットの3次元モデルへの操作、前記仮想ロボットのエンドエフェクタの位置または位置及び姿勢の登録指示、及び前記仮想ロボットの移動指示を受け付ける受付部と、
前記仮想ロボットの3次元モデルと前記相対的な位置関係とに基づいて、前記基準マーカと所定の位置関係となるように配置された前記仮想ロボットの3次元モデルを、受け付けられた操作に応じて表示するための表示画像を生成する画像生成部と、
前記表示画像を前記表示装置に出力する出力部と、
登録指示が受け付けられた際の前記仮想ロボットの3次元モデルにおけるエンドエフェクタの位置または位置及び姿勢を登録する登録部と、
移動指示の受け付けに応じて、前記基準マーカと前記仮想ロボットとの新たな位置関係を取得するロボット位置関係取得部と、を備え、
前記画像生成部は、前記ロボット位置関係取得部によって新たな位置関係が取得された場合に、前記基準マーカと新たな位置関係となるように配置された仮想ロボットの3次元モデルであって、エンドエフェクタが登録された位置または位置及び姿勢である仮想ロボットの3次元モデルを表示するための表示画像を生成する、画像生成装置。
続きを表示(約 940 文字)
【請求項2】
前記画像生成部は、前記ロボット位置関係取得部によって新たな位置関係が取得された際に、前記基準マーカと新たな位置関係となるように配置された仮想ロボットのエンドエフェクタが登録された位置または位置及び姿勢である状態で各関節の角度を逆運動学によって算出することができる場合に、当該新たな位置関係に応じた表示画像を生成し、そうでない場合に、当該新たな位置関係に応じた表示画像を生成しない、請求項1記載の画像生成装置。
【請求項3】
前記出力部は、前記基準マーカと新たな位置関係となるように配置された仮想ロボットのエンドエフェクタが登録された位置または位置及び姿勢である状態で各関節の角度を逆運動学によって算出することができない場合に、当該新たな位置関係に移動できない旨を出力する、請求項2記載の画像生成装置。
【請求項4】
前記画像生成部は、前記登録部によってエンドエフェクタの2以上の位置または位置及び姿勢が登録され、前記ロボット位置関係取得部によって新たな位置関係が取得された場合に、前記基準マーカと新たな位置関係となるように配置された仮想ロボットの3次元モデルであって、エンドエフェクタが登録された2以上の位置または位置及び姿勢である2以上の仮想ロボットの3次元モデルを表示するための表示画像を生成する、請求項1記載の画像生成装置。
【請求項5】
前記ロボット位置関係取得部は、前記登録部によってエンドエフェクタの2以上の位置または位置及び姿勢が登録された場合に、所定間隔で設定された複数の新たな位置関係を取得し、
前記画像生成部は、前記複数の新たな位置関係のうち、前記仮想ロボットのエンドエフェクタが登録された2以上の位置または位置及び姿勢である各状態で各関節の角度を逆運動学によって算出することができる新たな位置関係を特定し、前記基準マーカと特定した位置関係となるように配置された仮想ロボットの3次元モデルであって、エンドエフェクタが登録された2以上の位置または位置及び姿勢である2以上の仮想ロボットの3次元モデルを表示するための表示画像を生成する、請求項2または請求項3記載の画像生成装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、エンドエフェクタが登録された位置または位置及び姿勢である仮想ロボットの3次元モデルを表示するための表示画像を生成する画像生成装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、ロボットの導入時における配置検討では、カタログスペックを参考にしていた。また、ロボットの最適配置を出力できるシミュレータも用いられていた(特許文献1参照)。このシミュレータでは、ロボット以外にワークや周辺機器を設置することができ、さらに実環境とシミュレータ内の仮想環境との誤差を考慮した最適配置検討を行うことができる。
【先行技術文献】
【特許文献】
【0003】
特開2005-022062号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、シミュレータを用いる場合には、ロボット以外にワークや周辺機器などの3次元モデルを準備する必要があり、コストが増大するという問題があった。また、実環境と仮想環境との誤差を考慮した配置検討において、想定以上の誤差があった場合には、実環境でのロボットの動作時に周辺機器に干渉する可能性があった。そのため、ロボットの配置検討を、低コストかつ高い精度で行うことが要望されていた。
【0005】
本発明は、上記状況に応じてなされたものであり、低コストかつ高い精度でロボットの配置検討を行うための画像生成装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の一態様による画像生成装置は、実ロボットに対応する仮想ロボットの3次元モデルが記憶される記憶部と、実環境に存在する基準マーカと、画像を実環境の画像または実環境そのものに重ねて表示する表示装置との相対的な位置関係を取得するマーカ位置関係取得部と、仮想ロボットの3次元モデルへの操作、仮想ロボットのエンドエフェクタの位置または位置及び姿勢の登録指示、及び仮想ロボットの移動指示を受け付ける受付部と、仮想ロボットの3次元モデルと相対的な位置関係とに基づいて、基準マーカと所定の位置関係となるように配置された仮想ロボットの3次元モデルを、受け付けられた操作に応じて表示するための表示画像を生成する画像生成部と、表示画像を表示装置に出力する出力部と、登録指示が受け付けられた際の仮想ロボットの3次元モデルにおけるエンドエフェクタの位置または位置及び姿勢を登録する登録部と、移動指示の受け付けに応じて、基準マーカと仮想ロボットとの新たな位置関係を取得するロボット位置関係取得部と、を備え、画像生成部は、ロボット位置関係取得部によって新たな位置関係が取得された場合に、基準マーカと新たな位置関係となるように配置された仮想ロボットの3次元モデルであって、エンドエフェクタが登録された位置または位置及び姿勢である仮想ロボットの3次元モデルを表示するための表示画像を生成する、ものである。
【発明の効果】
【0007】
本発明の一態様による画像生成装置によれば、仮想ロボットの3次元モデルにおけるエンドエフェクタの位置または位置及び姿勢を固定した状態で、仮想ロボットの配置位置を変更した仮想ロボットの表示画像を実環境と一緒に見ることができるようになる。そのため、ロボットの配置検討を低コストかつ高精度で実現することができる。
【図面の簡単な説明】
【0008】
本発明の実施の形態による情報処理システムの構成を示す模式図
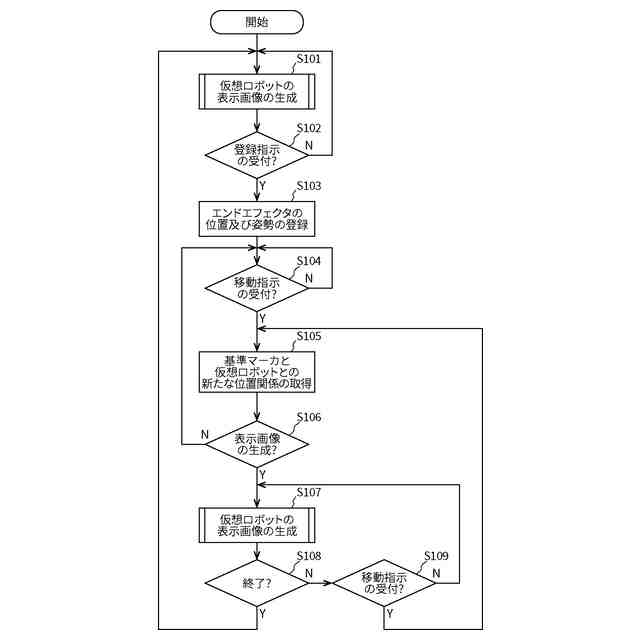
同実施の形態による画像生成装置の動作を示すフローチャート
同実施の形態による画像生成装置の動作を示すフローチャート
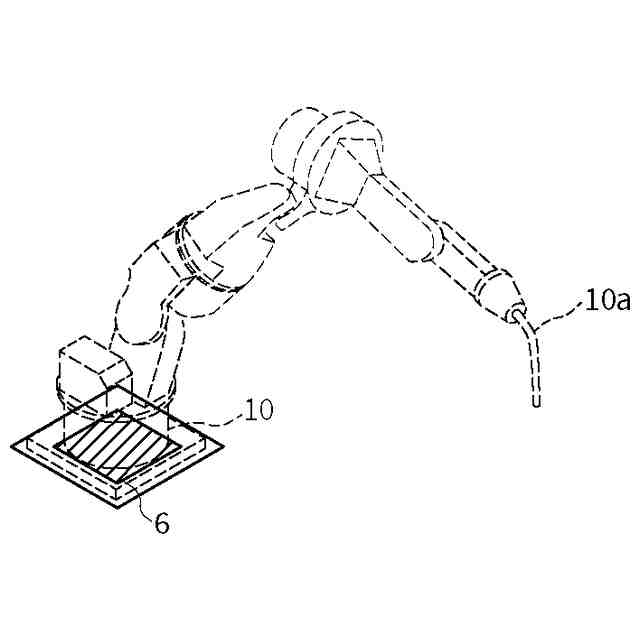
同実施の形態における移動前の仮想ロボットを示す図
同実施の形態における移動後の仮想ロボットを示す図
同実施の形態における仮想ロボットの移動先の複数の候補を示す図
【発明を実施するための形態】
【0009】
以下、本発明による画像生成装置について、実施の形態を用いて説明する。なお、以下の実施の形態において、同じ符号を付した構成要素及びステップは同一または相当するものであり、再度の説明を省略することがある。本実施の形態による画像生成装置は、仮想ロボットのエンドエフェクタの位置及び姿勢を登録し、エンドエフェクタが登録した位置及び姿勢である仮想ロボットの3次元モデルを、新たな配置位置に表示する表示画像を生成するものである。
【0010】
図1は、本実施の形態による情報処理システム100の構成を示す模式図である。本実施の形態による情報処理システム100は、画像生成装置3と表示装置4とを備える。なお、画像生成装置3と表示装置4とは、例えば、有線または無線で接続されていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
双方向コンバータ
5日前
株式会社ダイヘン
埋もれアーク溶接方法
4日前
株式会社ダイヘン
充電装置、および、充電システム
4日前
個人
釘抜き機
5か月前
株式会社フジキン
レンチ
6か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
25日前
個人
ペットボトル用蓋開け具。
6か月前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
UTM株式会社
搬送装置
5か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
1か月前
個人
ロボットシステム
4か月前
トヨタ自動車株式会社
関節機構
5か月前
学校法人立命館
ロボットハンド
2か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社不二越
ロボット
4か月前
株式会社不二越
ロボット
6か月前
学校法人立命館
グリッパ
1か月前
個人
プーリーキー抜き治具
1か月前
オムロン株式会社
ロボットハンド
6か月前
個人
作業台
5か月前
CKD株式会社
電動把持装置
4日前
川崎重工業株式会社
ロボット
6か月前
株式会社不二越
予測システム
2か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社中村製作所
トルクドライバー
2か月前
株式会社越智工業所
ブレーカ用カバー
4か月前
株式会社ダイヘン
画像生成装置
1か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
株式会社ダイヘン
情報処理装置
1か月前
株式会社ダイヘン
画像生成装置
1か月前
株式会社共和製作所
ロボット用アーム
12日前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
4か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ