TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023176524
公報種別
公開特許公報(A)
公開日
2023-12-13
出願番号
2022088850
出願日
2022-05-31
発明の名称
関節機構
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
17/02 20060101AFI20231206BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】第1関節部に対し第2関節部が一定角度以上で相対回転しても、ワイヤー同士の干渉を回避できること。
【解決手段】関節機構は、第1関節部と、第1関節部に対し、連結部材介して、連結部材の軸線周りに相対回転可能なように連結された第2関節部と、一端側が夫々直線状に並んでおり第1関節部から第2関節部に向けて延びており、他端側が第2関節部に円周状に夫々取付けられると共に、引張される複数のワイヤーと、第1関節部と第2関節部との間に設けられ、ワイヤーが経由することで、直線状に並んだワイヤーの一端側を相互にオフセットさせるオフセット部材と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
第1関節部と、
該第1関節部に対し、連結部材介して、該連結部材の軸線周りに相対回転可能なように連結された第2関節部と、
一端側が夫々直線状に並んでおり前記第1関節部から前記第2関節部に向けて延びており、他端側が前記第2関節部に円周状に夫々取付けられると共に、引張される複数のワイヤーと、
前記第1関節部と前記第2関節部との間に設けられ、前記ワイヤーが経由することで、前記直線状に並んだワイヤーの一端側を相互にオフセットさせるオフセット部材と、
を備える関節機構。
続きを表示(約 300 文字)
【請求項2】
請求項1記載の関節機構であって、
前記オフセット部材は、前記直線状に並んだワイヤーの一端側を、円周状にオフセットさせる、
関節機構。
【請求項3】
請求項2記載の関節機構であって、
前記オフセット部材は、前記直線状に並んだワイヤーの一端側を、前記ワイヤーの他端側を円周状に固定した際の該円と同芯円状にオフセットさせる、
関節機構。
【請求項4】
請求項1乃至3のうちいずれか1項記載の関節機構であって、
前記第1関節部はロボットの肘関節部であり、第2関節部はロボットの手首関節部である、
関節機構。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットなどの関節機構に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
第1関節部と、第1関節部に対し、連結部材介して、連結部材の軸線周りに相対回転可能なように連結された第2関節部と、一端側が夫々直線状に並んでおり第1関節部から第2関節部に向けて延びており、他端側が第2関節部に円周状に夫々固定されると共に、引張される複数のワイヤーと、を備える関節機構が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6545768号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記関節機構においては、第1関節部に対し第2関節部が一定角度以上で相対回転すると、ワイヤー同士が干渉する虞がある。
【0005】
本発明は、このような問題点に鑑みてなされたものであり、第1関節部に対し第2関節部が一定角度以上で相対回転しても、ワイヤー同士の干渉を回避できる関節機構を提供することを主たる目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための本発明の一態様は、
第1関節部と、
該第1関節部に対し、連結部材介して、該連結部材の軸線周りに相対回転可能なように連結された第2関節部と、
一端側が夫々直線状に並んでおり前記第1関節部から前記第2関節部に向けて延びており、他端側が前記第2関節部に円周状に夫々取付けられると共に、引張される複数のワイヤーと、
前記第1関節部と前記第2関節部との間に設けられ、前記ワイヤーが経由することで、前記直線状に並んだワイヤーの一端側を相互にオフセットさせるオフセット部材と、
を備える関節機構
である。
この一態様において、
前記オフセット部材は、前記直線状に並んだワイヤーの一端側を、円周状にオフセットさせてもよい。
この一態様において、
前記オフセット部材は、前記直線状に並んだワイヤーの一端側を、前記ワイヤーの他端側を円周状に固定した際の該円と同芯円状にオフセットさせてもよい。
この一態様において、
前記第1関節部はロボットの肘関節部であり、第2関節部はロボットの手首関節部であってもよい。
【発明の効果】
【0007】
本発明によれば、第1関節部に対し第2関節部が一定角度以上で相対回転しても、ワイヤー同士の干渉を回避できる関節機構を提供することができる。
【図面の簡単な説明】
【0008】
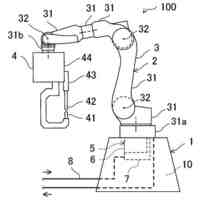
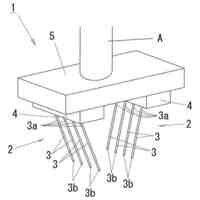
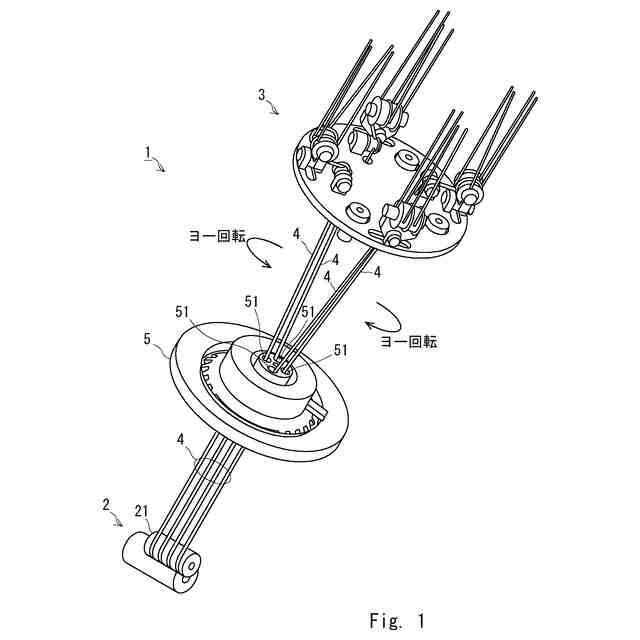
本実施形態に係る関節機構の概略的な構成を示す斜視図である。
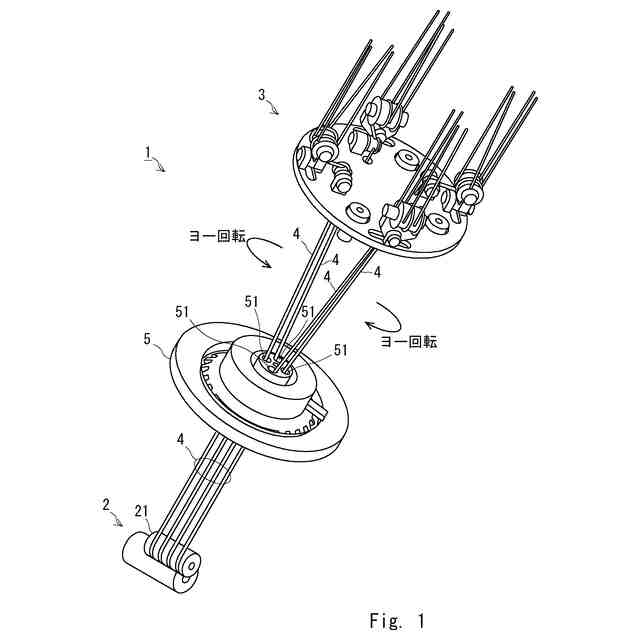
ワイヤーの干渉を示す図である。
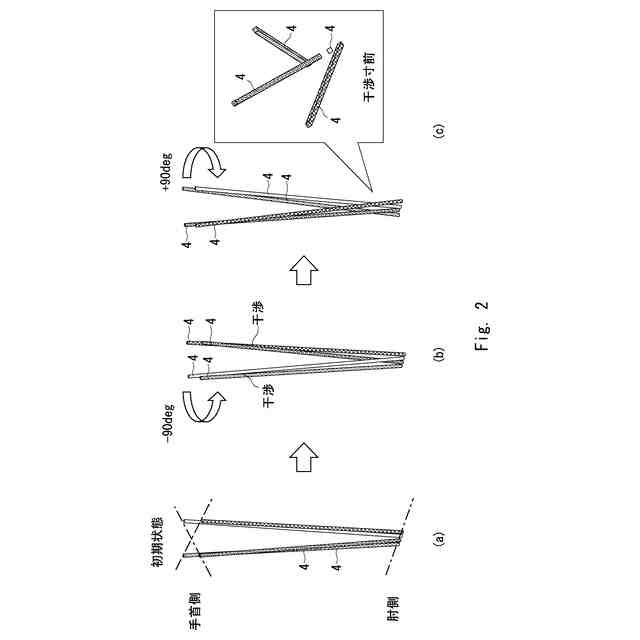
肘関節部側から手首関節部側へワイヤーを見た上面視図である。
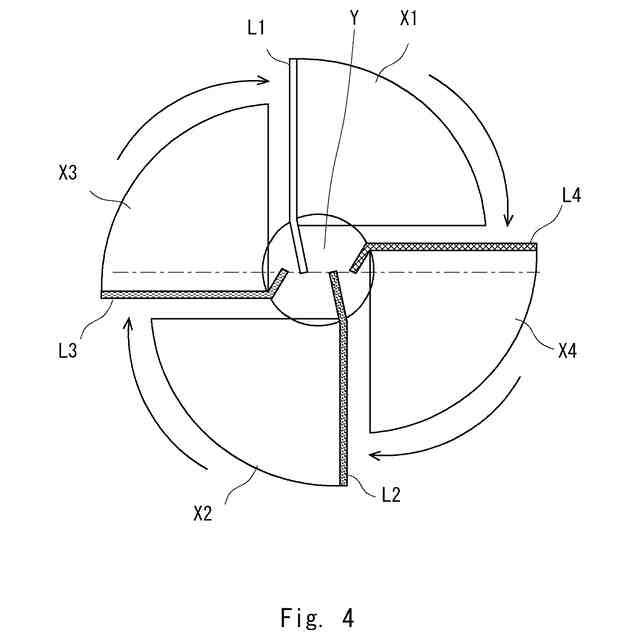
オフセット部材により4本のワイヤーがオフセットした状態を示す図である。
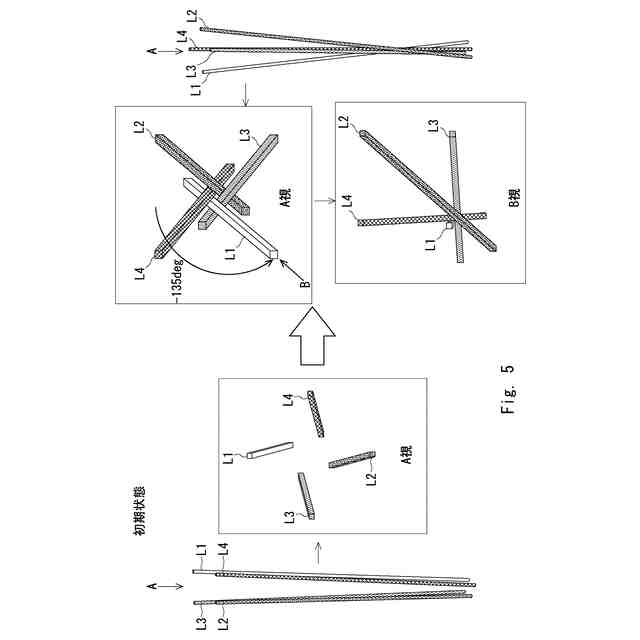
本実施形態に係るワイヤーの干渉のシミュレーション結果を示す図である。
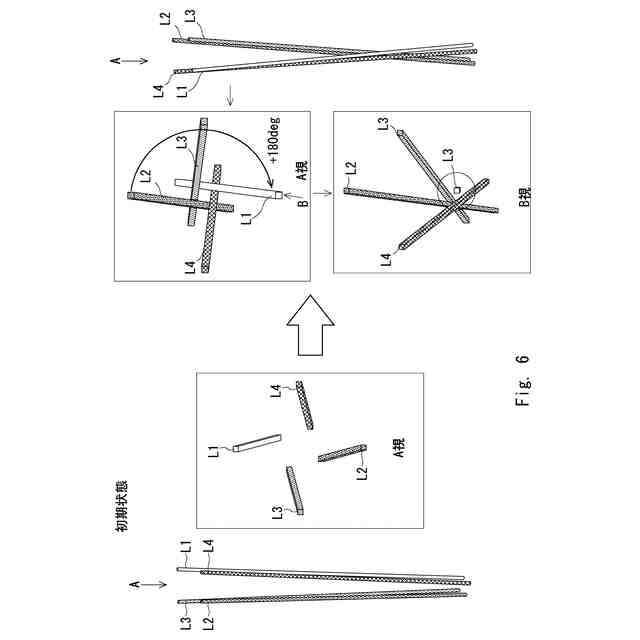
本実施形態に係るワイヤーの干渉のシミュレーション結果を示す図である。
【発明を実施するための形態】
【0009】
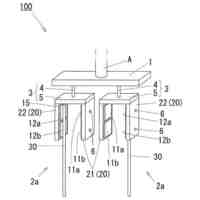
以下、図面を参照して本発明の実施形態について説明する。本実施形態に係る関節機構は、例えば、ロボットアームなどに設けられる。図1は、本実施形態に係る関節機構の概略的な構成を示す斜視図である。
【0010】
本実施形態に係る関節機構1は、例えば、肘関節部2と、肘関節部2に対し、連結部材(不図示)を介して、連結部材の軸線周りに相対回転可能なように連結された手首関節部3と、肘関節部2から手首関節部3に向けて延びると共に引張される複数のワイヤー4と、を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
株式会社フジキン
レンチ
6か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
16日前
個人
繋がるハンドル付き工具。
8か月前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
個人
ペットボトル用蓋開け具。
5か月前
UTM株式会社
搬送装置
5か月前
川崎重工業株式会社
ハンド
7か月前
株式会社右川ゴム製造所
把持装置
25日前
川崎重工業株式会社
ハンド
7か月前
川崎重工業株式会社
ハンド
2か月前
川崎重工業株式会社
ロボット
8か月前
個人
ロボットシステム
4か月前
株式会社不二越
ロボット
4か月前
株式会社マキタ
電動工具
7か月前
株式会社不二越
ロボット
6か月前
学校法人立命館
グリッパ
1か月前
オムロン株式会社
ロボット装置
7か月前
オムロン株式会社
搬送システム
7か月前
株式会社マキタ
動力工具
8か月前
トヨタ自動車株式会社
関節機構
4か月前
学校法人立命館
グリッパ
7か月前
学校法人立命館
ロボットハンド
1か月前
トヨタ自動車株式会社
関節機構
4か月前
個人
作業台
5か月前
株式会社マキタ
多軸締付機
8か月前
オムロン株式会社
ロボットハンド
6か月前
学校法人立命館
箸グリッパ
7か月前
川崎重工業株式会社
整列システム
7か月前
個人
プーリーキー抜き治具
1か月前
ハナツールズ株式会社
工具用取っ手
8か月前
株式会社近藤製作所
ロータリージョイント
6か月前
株式会社不二越
予測システム
2か月前
川崎重工業株式会社
ロボット
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ