TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023170617
公報種別
公開特許公報(A)
公開日
2023-12-01
出願番号
2022082499
出願日
2022-05-19
発明の名称
関節機構
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
17/00 20060101AFI20231124BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
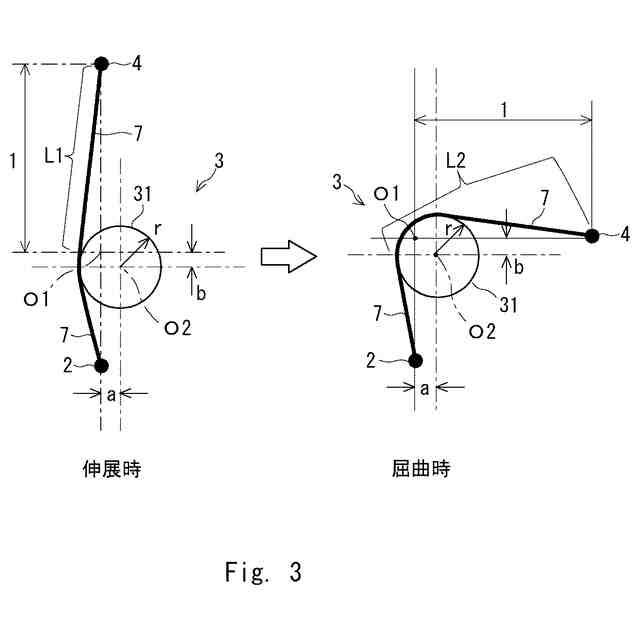
【課題】関節部が回転しても線状部材の経路長変化を抑制できること。
【解決手段】関節機構は、第1リンク及び第2リンクと、第1リンク及び第2リンクを回転可能に連結する関節部と、関節部に設けられたプーリーと、第1リンク側の一端から、途中でプーリーに巻き付けられ、第2リンク側の他端まで延びる線状部材と、を備えている。関節部の伸展時と屈曲時における線状部材の経路長変化が小さくなるように、関節部の回転中心がプーリーの中心に対してオフセットしている。
【選択図】図3
特許請求の範囲
【請求項1】
第1リンク及び第2リンクと、
前記第1リンク及び前記第2リンクを回転可能に連結する関節部と、
前記関節部に設けられたプーリーと、
前記第1リンク側の一端から、途中で前記プーリーに巻き付けられ、前記第2リンク側の他端まで延びる線状部材と、を備え、
前記関節部の伸展時と屈曲時における前記線状部材の経路長変化が小さくなるように、前記関節部の回転中心が前記プーリーの中心に対してオフセットしている、
関節機構。
続きを表示(約 570 文字)
【請求項2】
請求項1記載の関節機構であって、
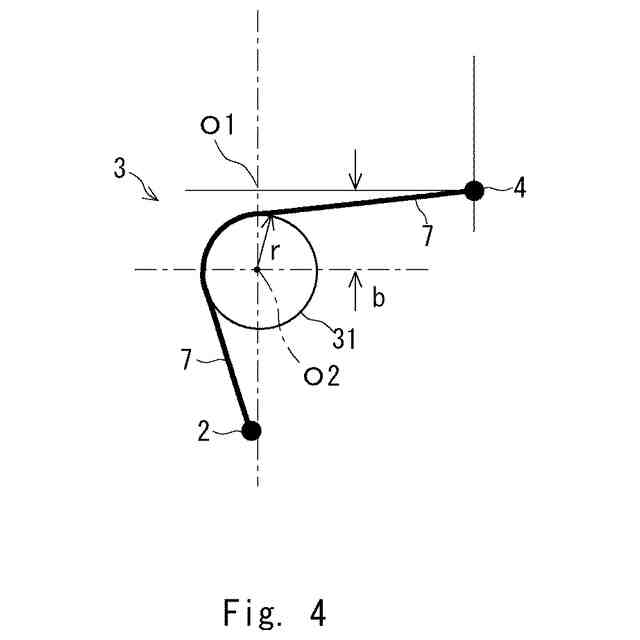
前記関節部の回転中心と前記線状部材の他端との距離をlとし、
前記プーリーの半径をrとし、
前記線状部材の一端及び他端を通る線と平行で前記プーリーの中心を通る線と、前記線状部材の一端と、の距離をaとし、
前記線状部材の一端及び他端を通る線に垂直で前記関節部の回転中心を通る線と、前記プーリーの中心と、の距離をbとした場合、
以下の式により求めた差分値Δが所定値以下となるように、前記関節部の回転中心が前記プーリーの中心に対してオフセットしている、
差分値Δ=
((l-a)
2
+(r-b)
2
)
1/2
+πr/2-((l+b)
2
+(r-a)
2
)
1/2
関節機構。
【請求項3】
請求項2記載の関節機構であって、
前記差分値Δが0となるように、前記関節部の回転中心が前記プーリーの中心に対してオフセットしている、関節機構。
【請求項4】
請求項2記載の関節機構であって、
a=bとなるように、前記関節部の回転中心が前記プーリーの中心に対してオフセットしている、関節機構。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットなどの関節機構に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
第1リンク及び第2リンクと、第1リンク及び第2リンクを回転可能に連結する関節部と、関節部に設けられたプーリーと、第1リンク側の一端から、途中でプーリーに巻き付けられ、第2リンク側の他端まで延びる線状部材と、を備える関節機構が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6545768号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記関節機構においては、関節部の回転に伴い線状部材の経路長が変化する虞がある。
【0005】
本発明は、このような問題点に鑑みてなされたものであり、関節部が回転しても線状部材の経路長変化を抑制できる関節機構を提供することを主たる目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための本発明の一態様は、
第1リンク及び第2リンクと、
前記第1リンク及び前記第2リンクを回転可能に連結する関節部と、
前記関節部に設けられたプーリーと、
前記第1リンク側の一端から、途中で前記プーリーに巻き付けられ、前記第2リンク側の他端まで延びる線状部材と、を備え、
前記関節部の伸展時と屈曲時における前記線状部材の経路長変化が小さくなるように、前記関節部の回転中心が前記プーリーの中心に対してオフセットしている、
関節機構、
である。
この一態様において、
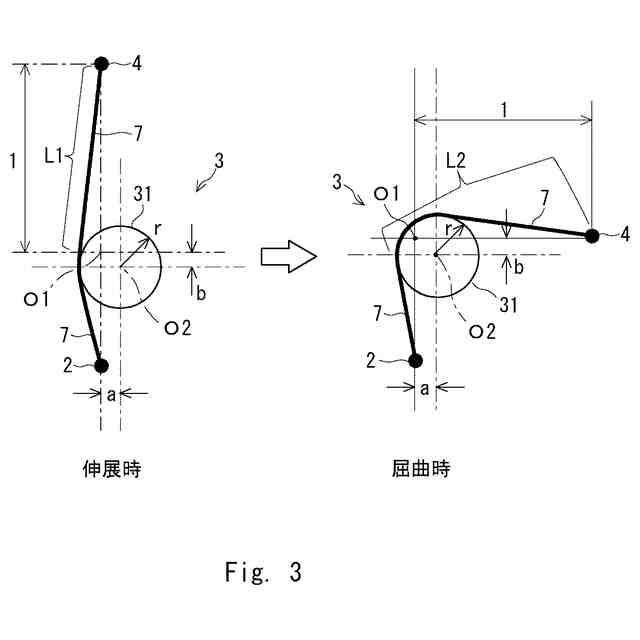
前記関節部の回転中心と前記線状部材の他端との距離をlとし、
前記プーリーの半径をrとし、
前記線状部材の一端及び他端を通る線と平行で前記プーリーの中心を通る線と、前記線状部材の一端と、の距離をaとし、
前記線状部材の一端及び他端を通る線に垂直で前記関節部の回転中心を通る線と、前記プーリーの中心と、の距離をbとした場合、
以下の式により求めた差分値Δが所定値以下となるように、前記関節部の回転中心が前記プーリーの中心に対してオフセットしていてもよい。
差分値Δ=
((l-a)
2
+(r-b)
2
)
1/2
+πr/2-((l+b)
2
+(r-a)
2
)
1/2
この一態様において、
前記差分値Δが0となるように、前記関節部の回転中心が前記プーリーの中心に対してオフセットしていてもよい。
この一態様において、
a=bとなるように、前記関節部の回転中心が前記プーリーの中心に対してオフセットしていてもよい。
【発明の効果】
【0007】
本発明によれば、関節部が回転しても線状部材の経路長変化を抑制できる関節機構を提供することができる。
【図面の簡単な説明】
【0008】
本実施形態に係る関節機構の概略的構成を示す簡略図である。
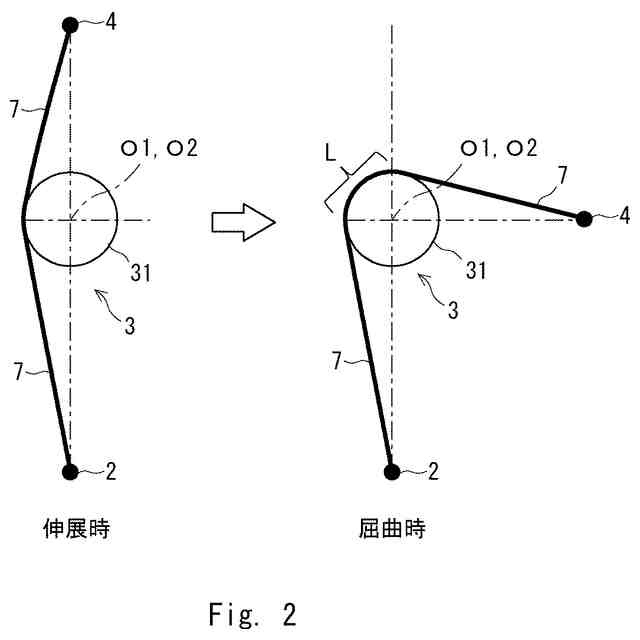
肘関節部とプーリーとの関係を示す図である。
肘関節部の伸展時と屈曲時におけるワイヤーの経路長変化を小さくする方法を説明するための図である。
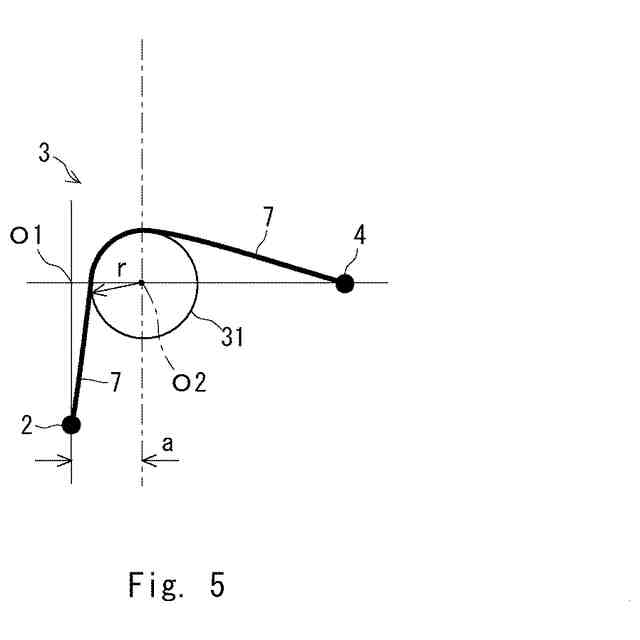
a=0の場合の、bとプーリーの半径rとの関係を示す図である。
b=0の場合の、aとプーリーの半径rとの関係を示す図である。
【発明を実施するための形態】
【0009】
以下、発明の実施形態を通じて本発明を説明するが、特許請求の範囲に係る発明を以下の実施形態に限定するものではない。また、実施形態で説明する構成の全てが課題を解決するための手段として必須であるとは限らない。
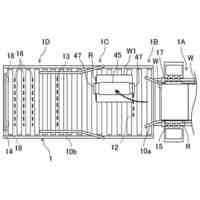
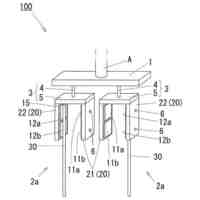
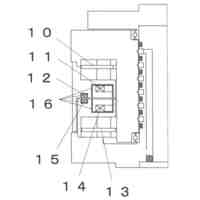
【0010】
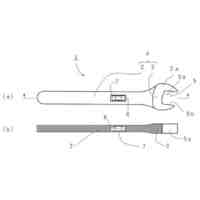
図1は、本実施形態に係る関節機構の概略的構成を示す簡略図である。本実施形態に係る関節機構1は、例えば、ロボットアームの関節機構として構成されている。関節機構1は肩関節部2と、肘関節部3と、手首関節部4と、肩関節部2と肘関節部3とを連結する第1リンク5と、肘関節部3と手首関節部4とを連結する第2リンク6と、を有している。肘関節部3は第1リンク5及び第2リンク6を回転可能に連結する。肘関節部3は、関節部の一具体例である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
株式会社フジキン
レンチ
6か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
16日前
UTM株式会社
搬送装置
5か月前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
個人
ペットボトル用蓋開け具。
5か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
25日前
川崎重工業株式会社
ハンド
7か月前
川崎重工業株式会社
ハンド
7か月前
個人
ロボットシステム
4か月前
学校法人立命館
ロボットハンド
1か月前
株式会社マキタ
電動工具
7か月前
オムロン株式会社
ロボット装置
7か月前
トヨタ自動車株式会社
関節機構
4か月前
学校法人立命館
グリッパ
1か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社不二越
ロボット
6か月前
学校法人立命館
グリッパ
7か月前
株式会社不二越
ロボット
4か月前
オムロン株式会社
搬送システム
7か月前
オムロン株式会社
ロボットハンド
6か月前
川崎重工業株式会社
整列システム
7か月前
学校法人立命館
箸グリッパ
7か月前
個人
作業台
5か月前
個人
プーリーキー抜き治具
1か月前
株式会社不二越
予測システム
2か月前
川崎重工業株式会社
ロボット
6か月前
株式会社近藤製作所
ロータリージョイント
6か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
画像生成装置
25日前
国立大学法人東北大学
剛性可変連結体
5か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
情報処理装置
25日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ