TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2023126020
公報種別
公開特許公報(A)
公開日
2023-09-07
出願番号
2022030447
出願日
2022-02-28
発明の名称
整列システム
出願人
川崎重工業株式会社
代理人
個人
主分類
B25J
13/00 20060101AFI20230831BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】整列後の対象物の向きを適切に管理する。
【解決手段】整列システム100は、方向性を有する複数の対象物Wを整列させる整列ロボット4と、整列ロボット4を制御する第1ロボット制御装置5とを備えている。第1ロボット制御装置5は、複数の対象物Wのそれぞれの整列向きを設定しており、複数の対象物Wのそれぞれを整列向きを向くように整列させるための整列動作を整列ロボット4に実行させる。
【選択図】図15
特許請求の範囲
【請求項1】
方向性を有する複数の対象物を整列させる整列ロボットと、
前記整列ロボットを制御するロボット制御装置とを備え、
前記ロボット制御装置は、
前記複数の対象物のそれぞれの整列向きを設定しており、
前記複数の対象物のそれぞれを前記整列向きを向くように整列させるための整列動作を前記整列ロボットに実行させる整列システム。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の整列システムにおいて、
前記複数の対象物を運搬するコンベアをさらに備え、
前記整列ロボットは、前記コンベアによって運搬されてくる前記複数の対象物を整列させる整列システム。
【請求項3】
請求項2に記載の整列システムにおいて、
前記コンベアは、前記複数の対象物を規則的に配列した状態で運搬する整列システム。
【請求項4】
請求項3に記載の整列システムにおいて、
前記コンベアは、前記複数の対象物のそれぞれが一定の向きを向いた状態で前記複数の対象物を運搬する整列システム。
【請求項5】
請求項2乃至4の何れか1つに記載の整列システムにおいて、
前記整列向きは、前記コンベアを基準とする向きである整列システム。
【請求項6】
請求項1乃至5の何れか1つに記載の整列システムにおいて、
前記ロボット制御装置は、
前記複数の対象物のそれぞれの所定の基準面の向きによって前記方向性を規定し、
前記基準面が前記整列向きを向くように前記複数の対象物のそれぞれを整列させるための整列動作を前記整列ロボットに実行させる整列システム。
【請求項7】
請求項1に記載の整列システムにおいて、
前記複数の対象物のそれぞれの整列前の向きを検出するセンサをさらに備え、
前記ロボット制御装置は、前記整列向きと前記センサの検出結果に基づいて判別される整列前の向きとに基づいて前記複数の対象物のそれぞれに対する前記整列動作を生成する整列システム。
【請求項8】
請求項1乃至7の何れか1つに記載の整列システムにおいて、
前記整列ロボットによって整列させられた前記複数の対象物を所定の配置場所に移送する移送装置をさらに備える整列システム。
【請求項9】
請求項8に記載の整列システムにおいて、
前記整列向きは、第1整列向きと、前記第1整列向きとは異なる第2整列向きとを含み、
前記移送装置は、前記整列ロボットによって前記第1整列向きを向くように整列させられた対象物を所定の第1配置向きを向くように前記配置場所に配置する一方、前記整列ロボットによって前記第2整列向きを向くように整列させられた対象物を前記第1配置向きとは異なる第2配置向きを向くように前記配置場所に配置する整列システム。
【請求項10】
請求項9に記載の整列システムにおいて、
前記第2整列向きは、前記第1整列向きと反対向きであり、
前記第2配置向きは、前記第1配置向きと反対向きである整列システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
ここに開示された技術は、整列システムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来より、コンベア等によって運搬される複数の対象物を整列させる技術が知られている。例えば、特許文献1には、搬送される複数の物品の中から基準となる物品を選択し、基準となる物品に対して他の物品を整列させるシステムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2015-214012号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1のシステムは、基準となる対象物に対して他の対象物を整列させるので、対象物の整列状態は、基準となる対象物に依存する。つまり、前述のシステムでは、整列後の対象物の向きを管理することが難しい。
【0005】
ここに開示された技術は、かかる点に鑑みてなされたものであり、その目的とするところは、整列後の対象物の向きを適切に管理することにある。
【課題を解決するための手段】
【0006】
ここに開示された整列システムは、方向性を有する複数の対象物を整列させる整列ロボットと、前記整列ロボットを制御するロボット制御装置とを備え、前記ロボット制御装置は、前記複数の対象物のそれぞれの整列向きを設定しており、前記複数の対象物のそれぞれを前記整列向きを向くように整列させるための整列動作を前記整列ロボットに実行させる。
【発明の効果】
【0007】
前記整列システムによれば、整列後の対象物の向きを適切に管理することができる。
【図面の簡単な説明】
【0008】
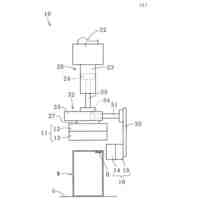
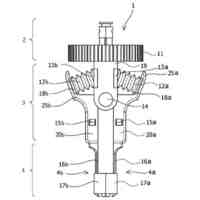
図1は、整列システムの斜視図である。
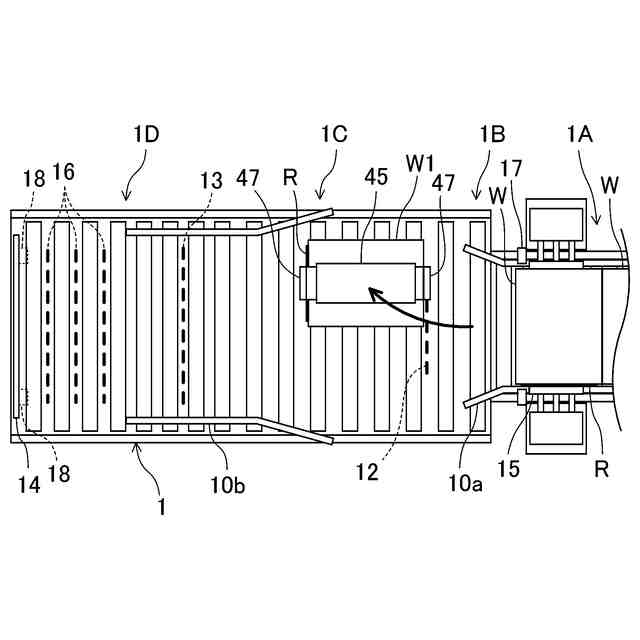
図2は、整列システムの平面図である。
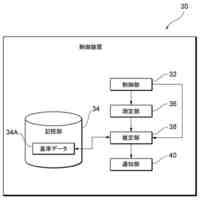
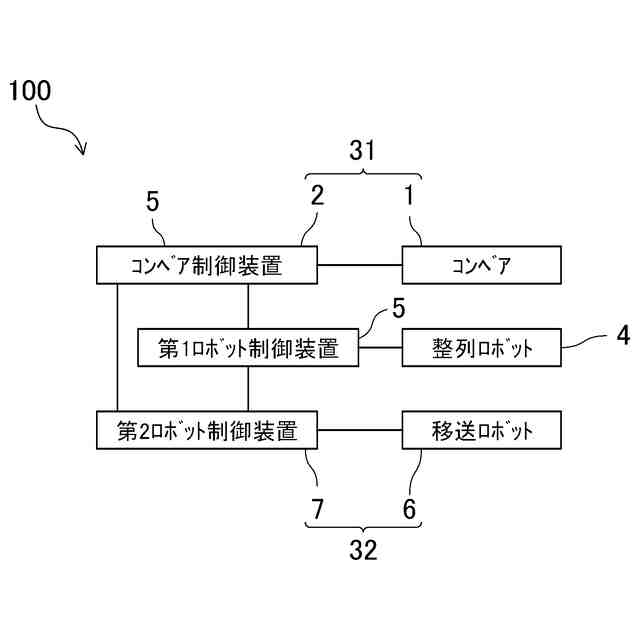
図3は、整列システムの概略構成を示す構成図である。
図4は、対象物の斜視図である。
図5は、コンベア制御装置の概略的なハードウェア構成を示す図である。
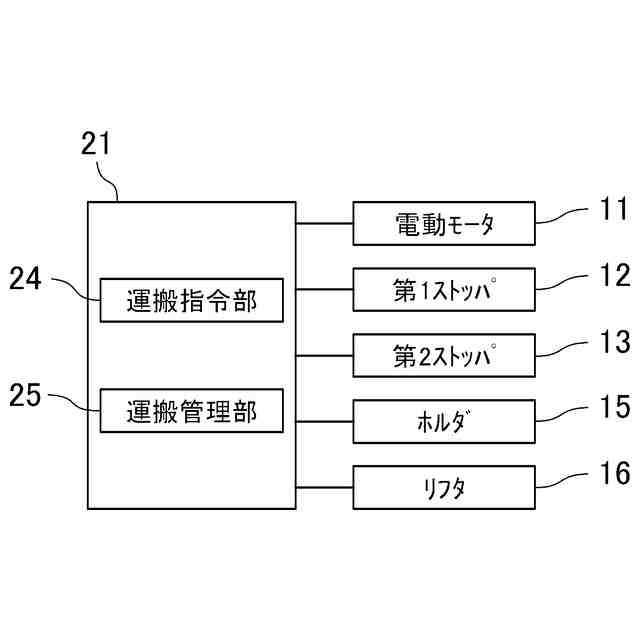
図6は、制御部の機能ブロック図である。
図7は、第1ロボット制御装置の概略的なハードウェア構成を示す図である。
図8は、制御部の機能ブロック図である。
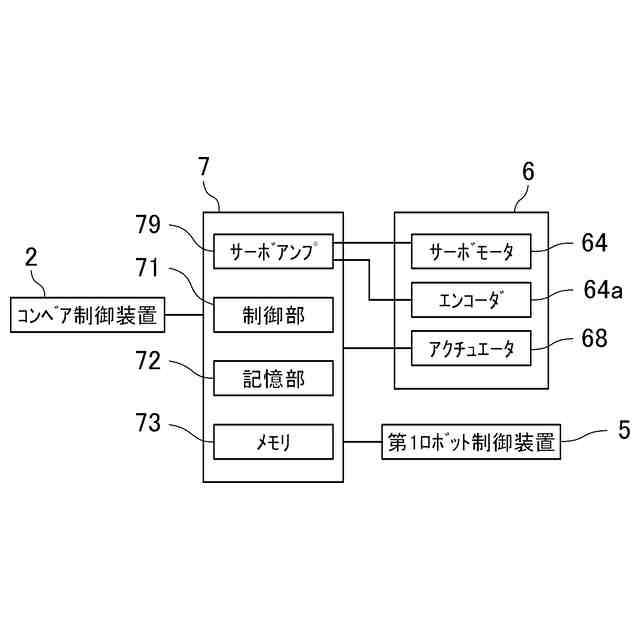
図9は、第2ロボット制御装置の概略的なハードウェア構成を示す図である。
図10は、制御部の機能ブロック図である。
図11は、パレタイズ時のコンベアの動作のフローチャートである。
図12は、整列動作のフローチャートである。
図13は、移送動作のフローチャートである。
図14は、第1対象物に対する整列ロボットの把持動作を示す説明図である。
図15は、第1対象物に対する整列ロボットの転換動作を示す説明図である。
図16は、第2対象物に対する整列ロボットの把持動作を示す説明図である。
図17は、第2対象物に対する整列ロボットの転換動作を示す説明図である。
図18は、第3対象物に対する整列ロボットの把持動作を示す説明図である。
図19は、第1対象物及び第2対象物に対する移送ロボットの把持動作、並びに、第3対象物に対する整列ロボットの転換動作を示す説明図である。
図20は、第1対象物及び第2対象物に対する移送ロボットの運搬動作、並びに、第4対象物に対する整列ロボットの把持動作を示す説明図である。
図21は、第1対象物及び第2対象物に対する移送ロボットの解除動作、並びに、第4対象物に対する整列ロボットの転換動作を示す説明図である。
図22は、第3対象物及び第4対象物に対する移送ロボットの解除動作、並びに、第2対象物に対する整列ロボットの転換動作を示す説明図である。
図23は、デパレタイズの際のコンベアによる対象物の運搬を示す説明図である。
図24は、デパレタイズ時の第4対象物に対する整列ロボットの転換動作を示す説明図である。
図25は、デパレタイズ時の第3対象物に対する整列ロボットの転換動作を示す説明図である。
図26は、デパレタイズ時の第2対象物に対する整列ロボットの転換動作を示す説明図である。
図27は、デパレタイズ時の第1対象物に対する整列ロボットの転換動作を示す説明図である。
図28は、変形例に係る整列システムの平面図である。
【発明を実施するための形態】
【0009】
以下、例示的な実施形態を図面に基づいて詳細に説明する。図1は、整列システム100の斜視図である。図2は、整列システム100の平面図である。図3は、整列システム100の概略構成を示す構成図である。
【0010】
整列システム100は、複数の対象物Wを運搬するコンベア1と、コンベア1によって運搬されてくる対象物Wを整列させる整列ロボット4と、整列ロボット4を制御する第1ロボット制御装置5とを備えている。整列システム100は、コンベア1によって搬送されてくる複数の対象物Wを所定の向きを向くように整列ロボット4によって整列させる。整列システム100は、コンベア1を制御するコンベア制御装置2をさらに備えてもよい。第1ロボット制御装置5は、ロボット制御装置の一例である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
27日前
株式会社ツノダ
挟持工具
2か月前
株式会社ツノダ
挟持工具
1か月前
株式会社右川ゴム製造所
把持装置
1か月前
川崎重工業株式会社
ハンド
2か月前
個人
ロボットシステム
4か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社不二越
ロボット
4か月前
学校法人立命館
グリッパ
1か月前
学校法人立命館
ロボットハンド
2か月前
個人
プーリーキー抜き治具
1か月前
東京都公立大学法人
ロボットハンド
1日前
株式会社不二越
予測システム
2か月前
CKD株式会社
電動把持装置
6日前
株式会社共和製作所
ロボット用アーム
14日前
小倉クラッチ株式会社
ロボットハンド
4か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
画像生成装置
1か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
画像生成装置
1か月前
株式会社中村製作所
トルクドライバー
2か月前
株式会社越智工業所
ブレーカ用カバー
4か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
情報処理装置
1か月前
西部電機株式会社
吸着装置
28日前
西部電機株式会社
吸着装置
28日前
株式会社豆蔵
ロボットハンド
1か月前
株式会社不二越
ロボットシステム
4か月前
個人
力制限減震装置
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ