TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024032571
公報種別
公開特許公報(A)
公開日
2024-03-12
出願番号
2022136293
出願日
2022-08-29
発明の名称
ロボットハンド
出願人
株式会社豆蔵
代理人
弁理士法人白坂
主分類
B25J
15/08 20060101AFI20240305BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】高速把持、安全性が高く、解放動作が可能であり、洗浄時の作業負荷が低いロボットハンドを提供する。
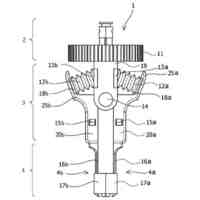
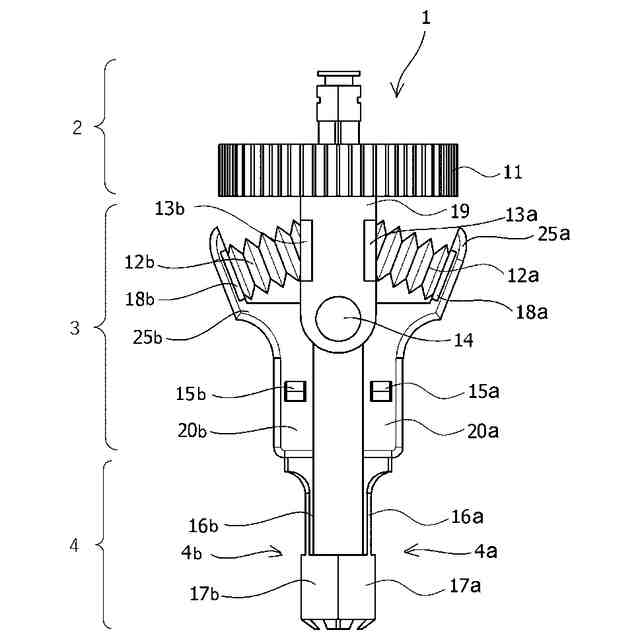
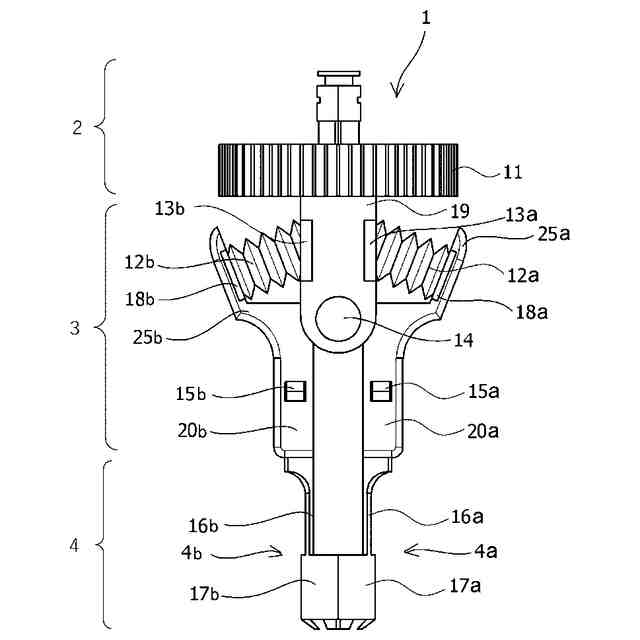
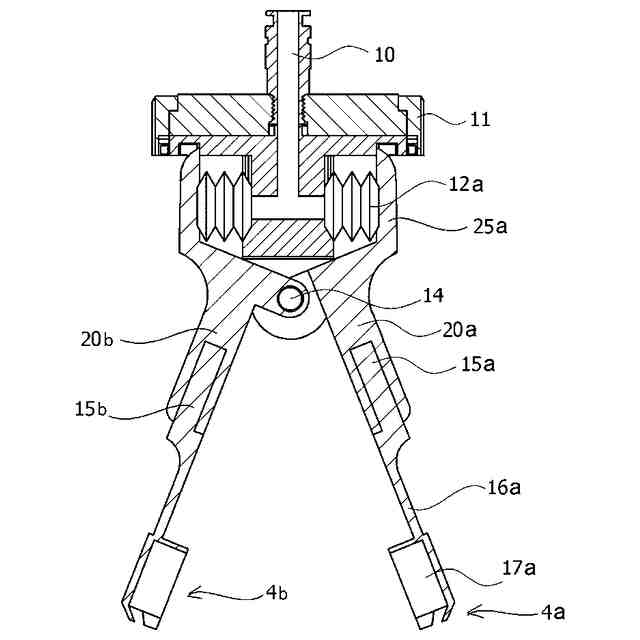
【解決手段】ロボットハンドであって、物品を把持するための2つ以上の爪と、爪が接続された爪と同数の指部であって、指部はリンクにおいて互いに回転可能に接続されている、指部と、指部が接続された指部と同数のベローズとを備え、ベローズは空圧制御システムに接続され、空圧制御システムによってベローズの内部の空圧が制御されてベローズの長さが制御されることによって、指部の間の距離が制御されて爪によって物品が把持される。
【選択図】図1
特許請求の範囲
【請求項1】
物品を把持するための2以上の爪と、
2以上の前記爪のそれぞれが接続された前記爪と同数の指部であって、前記指部はリンクにおいて互いに回転可能に接続されている、前記指部と、
前記指部が接続された前記指部と同数のベローズと
を備え、
前記ベローズは空圧制御システムに接続され、前記空圧制御システムによって前記ベローズの内部の空圧が制御されて前記ベローズの長さが制御されることによって、前記指部の間の距離が制御されて前記爪によって前記物品が把持され、前記爪と、前記指部と、前記ベローズとは、いずれも樹脂素材によって構成されることを特徴とするロボットハンド。
続きを表示(約 1,200 文字)
【請求項2】
前記爪は、前記指部に接続される位置に2つの突起部を有し、前記2つの突起部のそれぞれは、前記指部に設けられた2つの迎合孔に固定されることによって、前記爪は、前記指部に接続されることを特徴とする請求項1に記載のロボットハンド。
【請求項3】
前記指部の間の距離が最も小さいときの前記距離が、前記物品の大きさより大きいことを特徴とする請求項1に記載のロボットハンド。
【請求項4】
前記ロボットハンドを構成する部品の少なくとも一部に、所定の値を超える外力によって破壊される樹脂が用いられ、前記ロボットハンドに対する過負荷により、優先的に前記部品が破壊されることを特徴とする請求項1に記載のロボットハンド。
【請求項5】
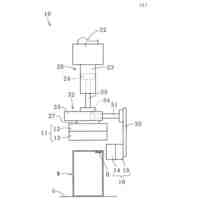
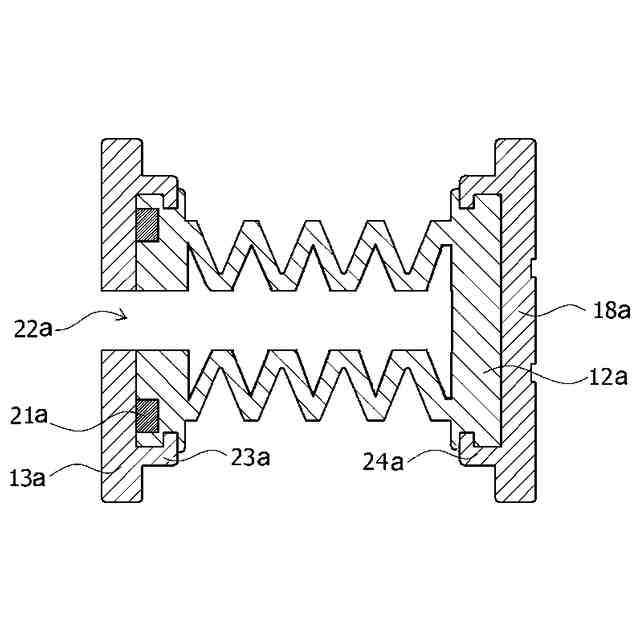
前記ベローズは、両端に連結部を備え、前記指部は前記ベローズに接続される位置に前記連結部を挟む溝を有し、前記空圧制御システムは、前記ベローズに接続される位置に前記連結部を挟む第2の溝を有し、前記空圧制御システムと前記ベローズの間に2つのパッキンを備えることを特徴とする請求項1に記載のロボットハンド。
【請求項6】
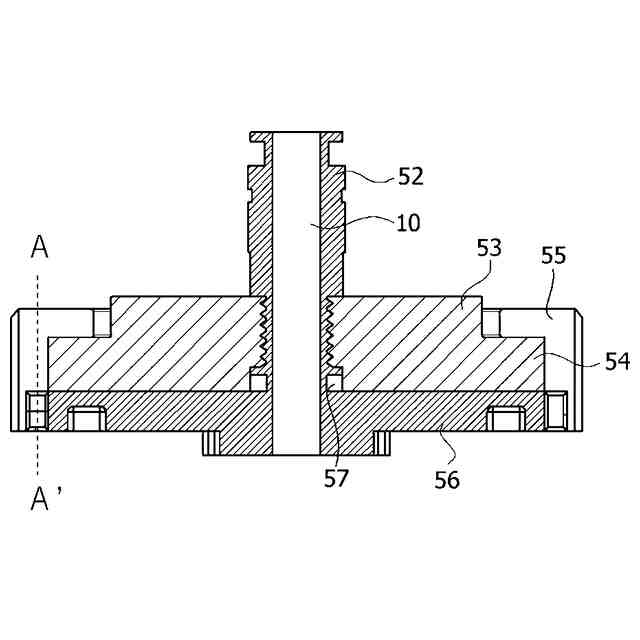
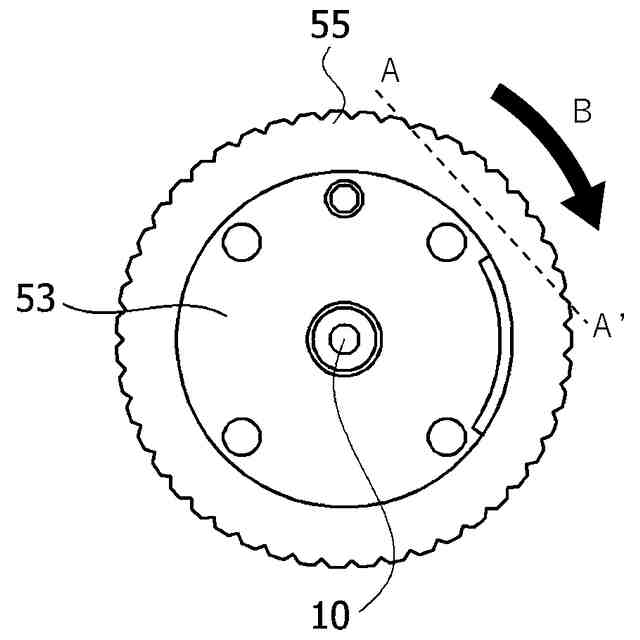
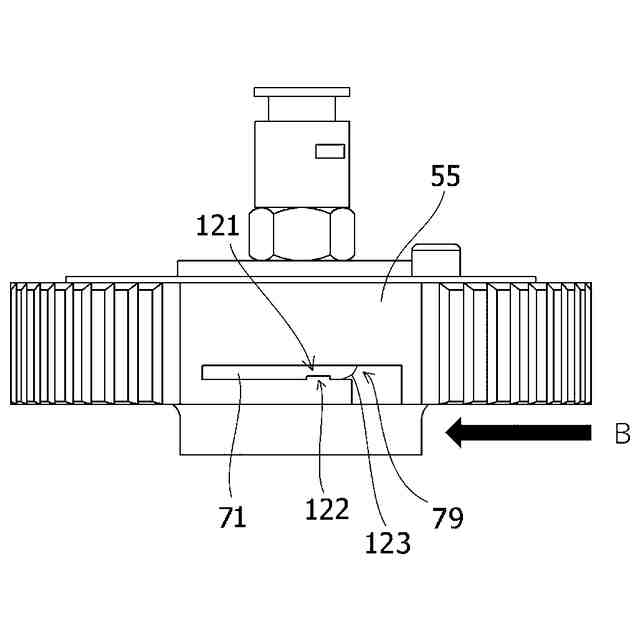
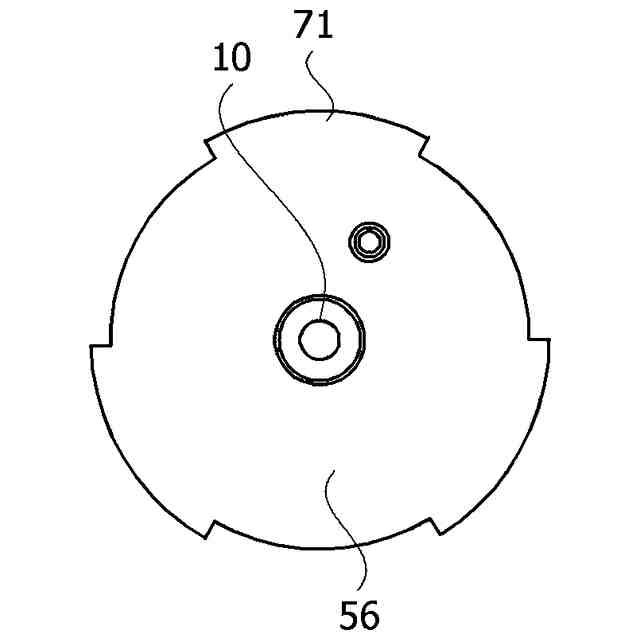
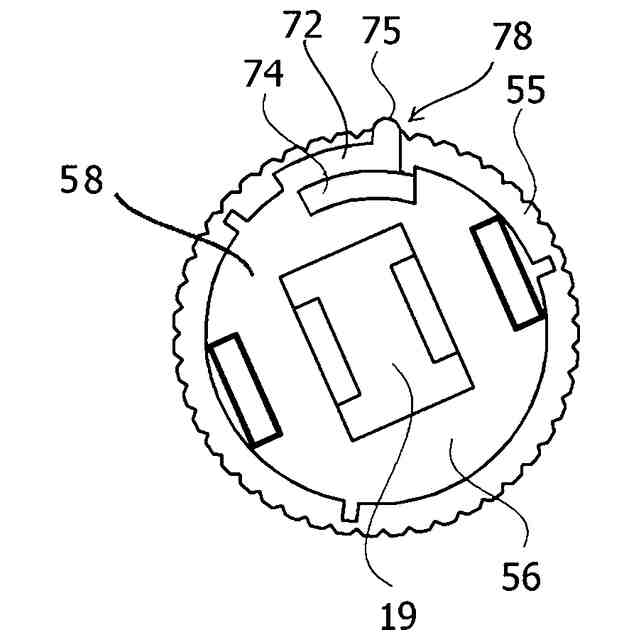
バヨネットリングと、前記空圧制御システムに接続された取付フランジとをさらに備え、前記取付フランジと前記ロボットハンドとを接触させ、前記バヨネットリングを回転させることによって前記取付フランジと前記ロボットハンドとを固定することを特徴とする請求項1に記載のロボットハンド。
【請求項7】
前記バヨネットリングは、勘合溝凸部を有する勘合溝を備え、
前記ロボットハンドは、爪凹部を有する外爪を備え、
前記バヨネットリングを回転させると、前記勘合溝は前記外爪対してスライドし、前記勘合溝凸部と前記爪凹部とが勘合することによって前記取付フランジと前記ロボットハンドとが固定されることを特徴とする請求項8に記載のロボットハンド。
【請求項8】
前記ロボットハンドは、弾性部と、前記弾性部の先端に突起を備え、
前記バヨネットリングは、迎合孔を備え、
前記バヨネットリングを回転させると、前記突起が前記迎合孔に入り、前記取付フランジと前記ロボットハンドとが固定されることを特徴とする請求項8に記載のロボットハンド。
【請求項9】
第2のパッキンをさらに備え、前記第2のパッキンは前記取付フランジと前記ロボットハンドとの間に配置され、前記ロボットハンドの前記空圧制御システムのエア接手と、前記取付フランジの前記空圧制御システムのエア接手、及び、前記ロボットハンドの電気接点と、前記取付フランジの電気接点とは、前記取付フランジと前記ロボットハンドとが接触する位置において接続されることを特徴とする請求項8に記載のロボットハンド。
【請求項10】
前記爪は把持部を有し、前記把持部は複数の長爪から成ることを特徴とする請求項1に記載のロボットハンド。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットハンドに関し、特に、物品把持のためのロボットハンドに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
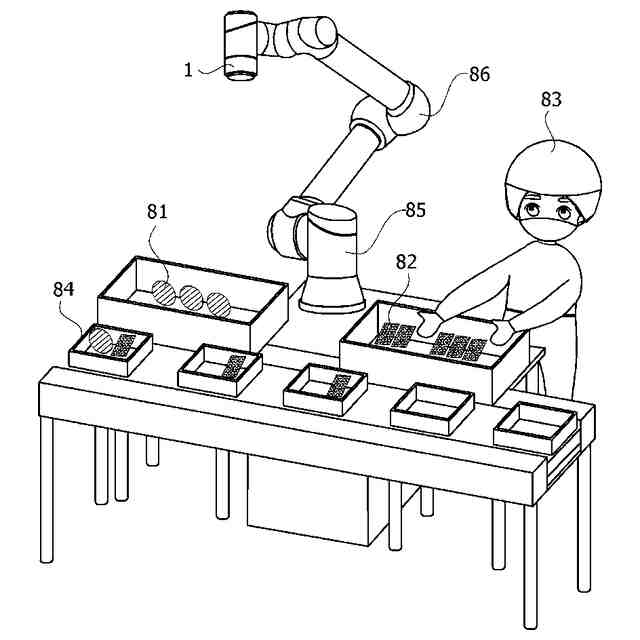
弁当・調理済み食品・総菜等を示す中食を製造する中食工場における調理済みの食品を食品容器に入れる盛り付け作業は、かつては全て作業員による手作業によって行われていたが、近年の人手不足、人件費高騰等の理由により、作業員による手作業に代わって、食品盛り付けに特化したロボットが開発されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-15985号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の食品把持のためのロボットハンドは、金属部品を含むため重く、ハンドの変形、及び制御に時間がかかるため、食品の高速把持、解放動作が困難であった(例えば、特許文献1参照)。また、金属部品には錆止めオイル、潤滑オイル等が塗布され、洗浄時にはオイルに合わせた洗剤を使用し、洗浄後に再度オイルを塗布する必要があった。さらに、金属部品が錆びた場合は、錆落とし、部品交換等を行う必要があり、作業負荷が高かった。
【0005】
また、従来の金属部品を含むロボットハンドは硬くて重いため、例えばロボットハンドと作業員が接触したとき、事故が起こりかねない等、受動的安全機能の提供が困難であった。
【0006】
上記問題点を鑑み、本発明は、安全性が高く、高速把持、解放動作が可能であり、洗浄時の作業負荷が低いロボットハンドを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の第1の態様は、ロボットハンドであって、物品を把持するための2つ以上の爪と、2つ以上の爪のそれぞれが接続された爪と同数の指部であって、指部はリンクにおいて互いに回転可能に接続されている、指部と、指部が接続された指部と同数のベローズとを備え、ベローズは空圧制御システムに接続され、空圧制御システムによってベローズの内部の空圧が制御されてベローズの長さが制御されることによって、指部の間の距離が制御されて爪によって物品が把持されることを要旨とする。
【0008】
本発明の第1の態様において、爪は、指部に接続される位置に2つの突起部を有し、2つの突起部のそれぞれは、指部に設けられた2つの迎合孔に固定されることによって、爪は、指部に接続されてもよい。
【0009】
本発明の第1の態様において、指部の間の距離が最も小さいときの距離が、物品の大きさより大きくてもよい。
【0010】
本発明の第1の態様において、ロボットハンドを構成する部品の少なくとも一部に、所定の値を超える外力によって破壊される樹脂が用いられ、ロボットハンドに対する過負荷により、優先的に部品が破壊されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社豆蔵
ロボットハンド
1か月前
日東精工株式会社
搬送装置
18日前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
27日前
株式会社不二越
ロボット
4か月前
学校法人立命館
ロボットハンド
1か月前
学校法人立命館
グリッパ
1か月前
個人
プーリーキー抜き治具
1か月前
株式会社不二越
予測システム
2か月前
株式会社中村製作所
トルクドライバー
1か月前
株式会社越智工業所
ブレーカ用カバー
4か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社共和製作所
ロボット用アーム
5日前
小倉クラッチ株式会社
ロボットハンド
4か月前
株式会社ダイヘン
画像生成装置
27日前
株式会社ダイヘン
情報処理装置
27日前
株式会社ダイヘン
画像生成装置
27日前
工機ホールディングス株式会社
作業機
3か月前
西部電機株式会社
吸着装置
19日前
西部電機株式会社
吸着装置
19日前
株式会社豆蔵
ロボットハンド
1か月前
株式会社不二越
ロボットシステム
4か月前
株式会社テス
あと施工アンカーの撤去装置
2か月前
株式会社マキタ
電動工具
1か月前
個人
力制限減震装置
28日前
川崎重工業株式会社
クリーンロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
ヤマハ発動機株式会社
ピッキング装置
3か月前
工機ホールディングス株式会社
作業機
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ