TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024029703
公報種別
公開特許公報(A)
公開日
2024-03-06
出願番号
2022132109
出願日
2022-08-22
発明の名称
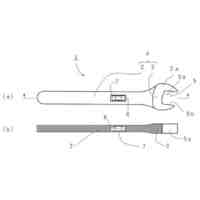
作業機
出願人
工機ホールディングス株式会社
代理人
個人
,
個人
主分類
B25F
5/00 20060101AFI20240228BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】落下時において好適にモータを制御することが可能な作業機を提供する。
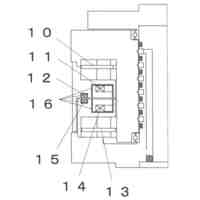
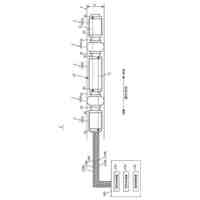
【解決手段】作業機1は、落下して地面に衝突した場合に衝撃に応じてモータ6を減速する落下保護機能を有する。マイコン98は、加速度センサ94の検出値に基づき作業機1の落下による衝撃を検知してモータ6を減速する減速制御を実行する。減速制御は、自然減速より速くモータ6を減速させるものである。減速制御に対して第1方向の加速度が及ぼす影響の度合いである第1感度が、減速制御に対して第2方向の加速度が及ぼす影響の度合いである第2感度よりも高くなるよう構成される。
【選択図】図5
特許請求の範囲
【請求項1】
ハウジングと、
前記ハウジングに収容されるモータと、
前記ハウジングに支持され、第1方向の加速度と第2方向の加速度を検出する加速度センサと、
前記第1方向の加速度と前記第2方向の加速度に基づき前記モータを減速する減速制御を実行するコントローラと、を有する作業機であって、
前記第1方向における前記加速度センサから前記作業機の表面端部までの第1距離が、前記第2方向における前記加速度センサから前記作業機の表面端部までの第2距離より大きく、
前記減速制御に対して前記第1方向の加速度が及ぼす影響の度合いである第1感度が、前記減速制御に対して前記第2方向の加速度が及ぼす影響の度合いである第2感度よりも高くなるよう構成した、作業機。
続きを表示(約 1,000 文字)
【請求項2】
ハウジングと、
前記ハウジングに収容されるモータと、
前記ハウジングに支持され、第1方向の加速度と第2方向の加速度を出力する加速度センサと、
前記第1方向の加速度と、前記第1方向の加速度に対応した第1係数と、前記第2方向の加速度と、前記第2方向の加速度に対応した第2係数と、を含む関数によって合成値を算出し、前記合成値が閾値を超えた場合に前記モータを減速する減速制御を実行するコントローラと、を有する作業機であって、
前記第1方向の加速度に対応した前記第1係数と、前記第2方向の加速度に対応した第2係数とが異なるように構成された、作業機。
【請求項3】
前記第1方向における前記加速度センサから前記作業機の表面端部までの第1距離が、前記第2方向における前記加速度センサから前記作業機の表面端部までの第2距離より大きく、前記第1係数が第2係数よりも大きい、請求項2に記載の作業機。
【請求項4】
前記第1方向と前記第2方向は反対方向である、請求項1から3のいずれか一項に記載の作業機。
【請求項5】
前記第1方向と前記第2方向は交差する方向である、請求項1から3のいずれか一項に記載の作業機。
【請求項6】
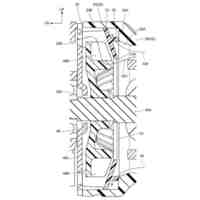
前記ハウジングの前記第1方向側に設けられたギヤケースと、
前記ハウジングの前記第2方向側に設けられた電池パックと、を有する、請求項4に記載の作業機。
【請求項7】
前記ハウジングの前記第1方向側に設けられたギヤケースを有し、
前記第2方向は、前記モータの径方向と平行な方向である、請求項5に記載の作業機。
【請求項8】
前記第1方向における前記作業機の表面端部の材質と、前記第2方向における前記作業機の表面端部の材質が異なり、前記第1係数と第2係数とが異なるように構成されている、請求項2に記載の作業機。
【請求項9】
前記第1方向における前記作業機の表面端部の材質が、前記第2方向における前記作業機の表面端部の材質よりも柔らかく、前記第1係数が第2係数よりも小さい、請求項8に記載の作業機。
【請求項10】
前記コントローラは、前記作業機に取り付けられる部材の種類または状態に応じて前記係数を変更するように構成される、請求項2に記載の作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
下記特許文献1は、作業機としてのディスクグラインダを開示する。作業機においてはモータを駆動状態に維持する、いわゆるオンロック機能を搭載している場合があるが、作業者の手から落下した後もモータの回転駆動が維持されると、加工材等を傷つける恐れがある。そこで、加速度センサの検出値により落下の衝撃を検知してモータを減速させる機能が考えられる。
【先行技術文献】
【特許文献】
【0003】
特開2011-143492号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業機が同じ高さから地面等に落下した場合でも、地面等との衝突箇所の材質や、衝突箇所から加速度センサまでの距離、衝突箇所から加速度センサまで衝撃が伝わる経路の構成など、様々な要因により、加速度センサの検出値は異なってくる。
【0005】
例えば、持ちやすさを踏まえて柔らかくしている把持部と、伝達機構(ギヤ等)を収容する金属製のケースとでは、地面に接触した際の衝撃が大きく異なり、加速度センサの検出値が大きく異なる場合がある。また、衝突箇所から加速度センサまでの距離が大きいと、衝突箇所から加速度センサまで衝撃が伝わる経路での衝撃の減衰量が大きくなり、加速度センサの検出値が小さくなる場合がある。
【0006】
ここで、加速度センサの検出値が小さくなる場合を基準に、落下有無を判断する閾値を小さく設定すると、落下していないにもかかわらず落下と誤判定するリスクが高くなる。
【0007】
したがって、例えば加速度センサの検出値をそのまま単一の閾値と比較して落下の有無を判断する構成では、適切にモータを減速させられない場合があった。
【0008】
なお、上記では落下時においてモータの回転が維持された場合で説明しているが、課題は落下のみに限られない。例えば、作業者の転倒などによって作業機が水平方向に投げ出される場合も想定され、こうした場合でもモータの回転駆動が維持されてしまうと加工材等を傷つける恐れがある。
【0009】
本発明の目的は、好適にモータを制御することが可能な作業機を提供することにある。
【課題を解決するための手段】
【0010】
本発明のある態様は、作業機である。この作業機は、
ハウジングと、
前記ハウジングに収容されるモータと、
前記ハウジングに支持され、前記作業機が落下して地面に衝突する際に、第1方向の加速度と第2方向の加速度を検出する加速度センサと、
前記第1方向の加速度と前記第2方向の加速度に基づき前記モータを減速する減速制御を実行するコントローラと、を有する作業機であって、
前記第1方向における前記加速度センサから前記作業機の表面端部までの第1距離が、前記第2方向における前記加速度センサから前記作業機の表面端部までの第2距離より大きく、
前記減速制御に対して前記第1方向の加速度が及ぼす影響の度合いである第1感度が、前記減速制御に対して前記第2方向の加速度が及ぼす影響の度合いである第2感度よりも高くなるよう構成したものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
6か月前
株式会社フジキン
レンチ
7か月前
個人
ねじ締め装置
5か月前
日東精工株式会社
搬送装置
1か月前
株式会社ツノダ
挟持工具
1か月前
個人
ペットボトル用蓋開け具。
6か月前
UTM株式会社
搬送装置
5か月前
株式会社ツノダ
挟持工具
2か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
1か月前
個人
ロボットシステム
5か月前
トヨタ自動車株式会社
関節機構
5か月前
学校法人立命館
ロボットハンド
2か月前
株式会社不二越
ロボット
6か月前
トヨタ自動車株式会社
関節機構
5か月前
株式会社不二越
ロボット
4か月前
学校法人立命館
グリッパ
2か月前
オムロン株式会社
ロボットハンド
7か月前
個人
プーリーキー抜き治具
2か月前
個人
作業台
5か月前
CKD株式会社
電動把持装置
13日前
東京都公立大学法人
ロボットハンド
8日前
川崎重工業株式会社
ロボット
7か月前
株式会社近藤製作所
ロータリージョイント
7か月前
株式会社不二越
予測システム
2か月前
国立大学法人東北大学
剛性可変連結体
5か月前
株式会社ダイヘン
画像生成装置
1か月前
学校法人 中央大学
管内移動ロボット
7か月前
株式会社越智工業所
ブレーカ用カバー
4か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社ダイヘン
画像生成装置
1か月前
株式会社ダイヘン
情報処理装置
1か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
工機ホールディングス株式会社
作業機
1日前
工機ホールディングス株式会社
作業機
5か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ