TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023140750
公報種別
公開特許公報(A)
公開日
2023-10-05
出願番号
2022046747
出願日
2022-03-23
発明の名称
管内移動ロボット
出願人
学校法人 中央大学
代理人
個人
主分類
B25J
5/00 20060101AFI20230928BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】配管において、曲管が連続するように設けられたり、長距離の間に複数設けられたりした場合であっても進行可能な自走式ロボットを提供する。
【解決手段】筒状に形成され、流体の供給により管径方向に膨張して管内壁を把持し、流体の供給により管径方向に収縮して管内壁の把持状態を開放する膨縮ユニットにより構成される把持部と、筒状に形成され、流体の供給により管軸方向に伸長し、流体の排出により管軸方向に収縮する伸縮ユニットにより構成される推進力発生部と、を交互に備え、推進力発生部の伸縮と、把持部の膨縮とを所定の順序で実行させることにより、曲管部を含む管内を移動可能とされた移動体を備えた管内移動ロボットであって、推進力発生部は、曲管部の内側内壁に沿って移動した仮定したときの内側経路と、曲管部の外側内壁に沿って移動した仮定したときの外側経路との経路長差よりも伸縮ユニットの伸縮量が長く設定された構成とした。
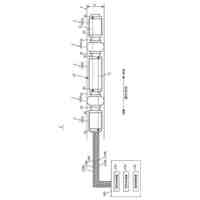
【選択図】図1
特許請求の範囲
【請求項1】
筒状に形成され、流体の供給により管径方向に膨張して管内壁を把持し、流体の供給により管径方向に収縮して管内壁の把持状態を開放する膨縮ユニットにより構成される把持部と、
筒状に形成され、流体の供給により管軸方向に伸長し、流体の排出により管軸方向に収縮する伸縮ユニットにより構成される推進力発生部と、を交互に備え、
推進力発生部の伸縮と、把持部の膨縮とを所定の順序で実行させることにより、曲管部を含む管内を移動可能とされた移動体を備えた管内移動ロボットであって、
前記推進力発生部は、前記曲管部の内側内壁に沿って移動した仮定したときの内側経路と、前記曲管部の外側内壁に沿って移動した仮定したときの外側経路との経路長差よりも前記伸縮ユニットの伸縮量が長く設定されたことを特徴とする管内移動ロボット。
続きを表示(約 500 文字)
【請求項2】
筒状に形成され、流体の供給により管径方向に膨張して管内壁を把持し、流体の供給により管径方向に収縮して管内壁の把持状態を開放する膨縮ユニットにより構成される把持部と、
筒状に形成され、流体の供給により管軸方向に伸長し、流体の排出により管軸方向に収縮する伸縮ユニットにより構成される推進力発生部と、を交互に備え、
推進力発生部の伸縮と、把持部の膨縮とを所定の順序で実行させることにより、曲管部を含む管内を移動可能とされた移動体を備えた管内移動ロボットであって、
前記伸縮ユニットは、前記管内において伸縮が許容され、該管の中心線に該伸縮ユニットの中心線が最も近づく外径寸法とされたことを特徴とする管内移動ロボット。
【請求項3】
前記伸縮ユニットは、外周に摩擦低減部材を備えることを特徴とする請求項1又は請求項2に記載の管内移動ロボット。
【請求項4】
前記伸縮ユニットは、管内壁に向けて突出し、該伸縮ユニットの中心線を管の中心線側に位置させるための支持手段を備えたことを特徴とする請求項1乃至請求項3いずれかに記載の管内移動ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、管内移動ロボットに関し、特に、蠕動運動を模した動作により管内を移動する管内移動ロボットに関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
従来、配管などの管内を移動するロボットの一つとして、例えば、特許文献1に示すような流体圧により駆動する自走ロボットが提案されている。
特許文献1に示す自走ロボットでは、走行面に対する摩擦状態を可変とし、可撓性を有するひも状の拘束手段により互いの距離が拘束された一対の摩擦部と、走行面に対する摩擦状態を可変とし、拘束手段に沿って一対の摩擦部の間を移動可能に設けられた中間摩擦部と、一対の摩擦部の間における前記中間摩擦部の位置を移動させる駆動部とを有するように構成されている。摩擦部及び中間摩擦部は、空気を供給することで径方向に膨張し、走行面と摩擦を生じさせるように構成される。駆動部は、中間摩擦部と各摩擦部の間のそれぞれに設けられ空気の供給により軸方向に伸長し、排出により収縮するように構成されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-198952号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の自走ロボットによれば、以下の行程を経ることで、走行ユニットが配管内を進行する。行程1:進行方向後方の摩擦部を膨張させた後に、進行方向後方の駆動部を伸長させることにより中間摩擦部を前方に移動させる。行程2:中間摩擦部を膨張させるとともに、後方の摩擦部及び後方の駆動部を収縮させる。行程3:中間摩擦部の膨張状態及び前方の摩擦部の収縮状態を維持したまま、前方の駆動部を伸長させて前方の摩擦部を前方に押し出して移動させることにより、前方の摩擦部と拘束手段で連結された収縮状態にある後方の摩擦部を前方に移動させる。行程4:中間摩擦部の膨張状態及び前方の駆動部の伸長状態を維持したまま、前方の摩擦部を膨張させる。行程5:前方の摩擦部の膨張状態及び前方の駆動部の伸長状態を維持したまま、中間摩擦部を収縮させるとともに後方の摩擦部を膨張させる。行程6:前方の摩擦部及び後方の摩擦部の膨張状態を維持したまま、前方の駆動部を収縮させるとともに、後方の駆動部を伸長させて、中間摩擦部を前方に移動させる。行程7:後方の駆動部の伸長状態及び後方の摩擦部の膨張状態を維持したまま、前方の摩擦部を収縮させる。このような行程1~行程7を経る中において、前方の摩擦部及び後方の摩擦部を拘束手段によって連結ことで、前方の駆動部を伸長させたときに、後方の摩擦部を前方に移動させるとともに、後方の駆動部をより収縮させることが可能となり、走行ユニットが前進するための大きな推進力を得るように構成されている。
一方で、走行ユニットは、配管に連続して曲管が設けられている場合や、複数箇所の曲管が設けられた配管内を奥へと進行することにより、3つの摩擦部及び2つの駆動部に流体を給排するためのチューブと配管、特に曲管部分における摩擦が大きくなり曲管の通過に時間を要したり、或いはそれ以上進行できなくなる虞がある。
【0005】
本発明は、上記課題を解決するため、配管において、曲管が連続して設けられていたり、長距離の移動の間に曲管が複数箇所設けられていたりする場合であっても走行ユニットの進行を可能とする管内移動ロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
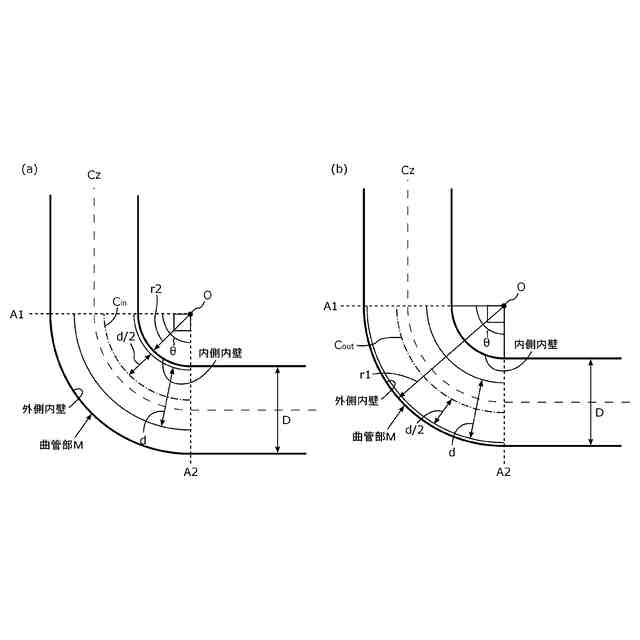
上記課題を解決するための管内移動ロボットの構成として、筒状に形成され、流体の供給により管径方向に膨張して管内壁を把持し、流体の供給により管径方向に収縮して管内壁の把持状態を開放する膨縮ユニットにより構成される把持部と、筒状に形成され、流体の供給により管軸方向に伸長し、流体の排出により管軸方向に収縮する伸縮ユニットにより構成される推進力発生部と、を交互に備え、推進力発生部の伸縮と、把持部の膨縮とを所定の順序で実行させることにより、曲管部を含む管内を移動可能とされた移動体を備えた管内移動ロボットであって、推進力発生部は、曲管部の内側内壁に沿って移動した仮定したときの内側経路と、曲管部の外側内壁に沿って移動した仮定したときの外側経路との経路長差よりも伸縮ユニットの伸縮量が長く設定したり、前記伸縮ユニットが、管内壁に向けて突出し、該伸縮ユニットの中心線を管の中心線側に位置させるための支持手段を備える構成とした。
本構成によれば、伸縮ユニットが曲管部分を通過するときに、管の中心線に近づく経路を通過することができ、例えば、移動対象の管に曲管が連続するように設けられていたり、長距離の間に複数設けられている場合であっても、曲管部分との間に生じる摩擦が小さくして、安定した長距離の移動を可能とすることができる。
また、伸縮ユニットは、外周に摩擦低減部材を備える構成としたり、径方向に放射状に突出する突出部を備える構成としたりすることにより、管内壁との摩擦を低減することができる。
【図面の簡単な説明】
【0007】
管内移動ロボットの構成例を示す図である。
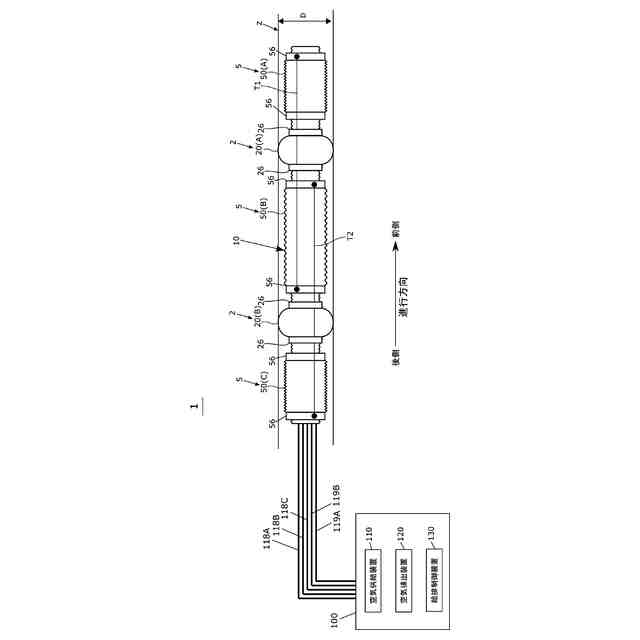
膨縮ユニットの軸方向断面図及び動作図である。
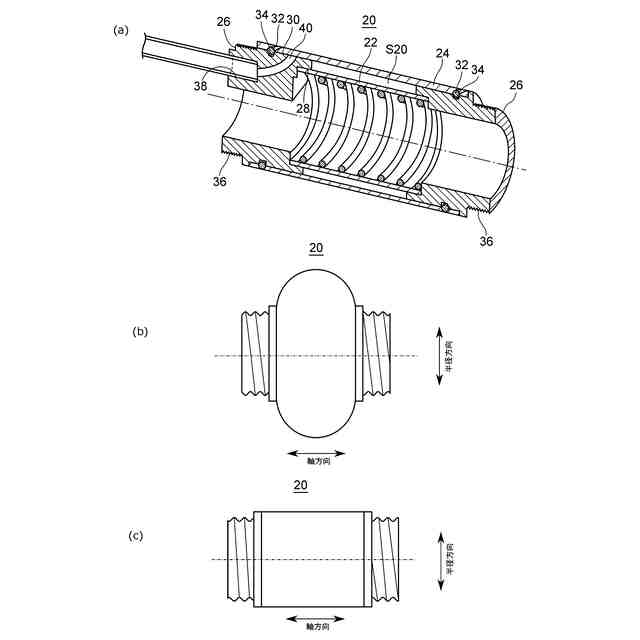
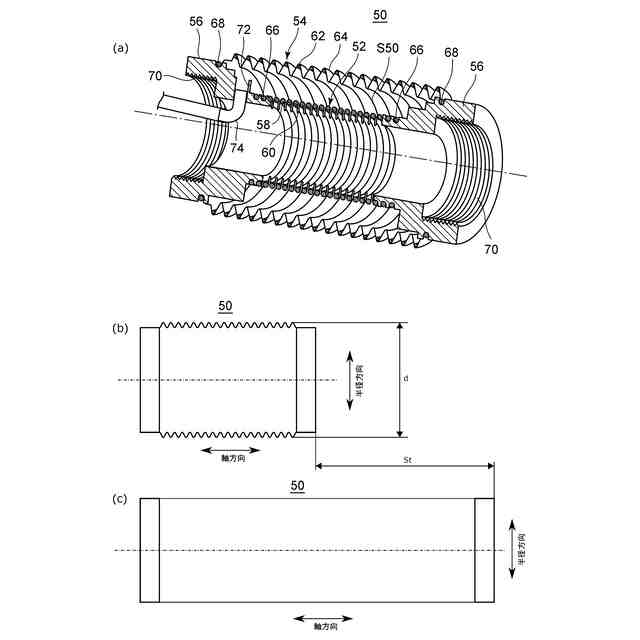
伸縮ユニットの軸方向断面図及び動作図である。
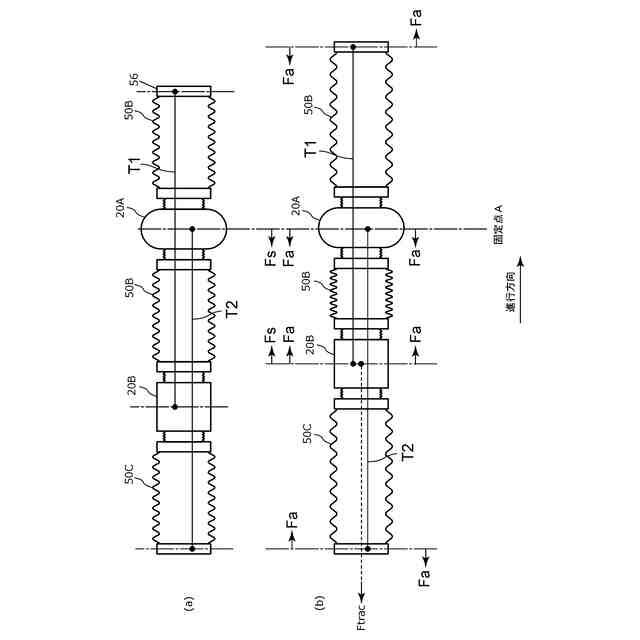
走行部の推進動作を示す図である。
走行部により得られる推進力(牽引力)の発生メカニズムを示す図である。
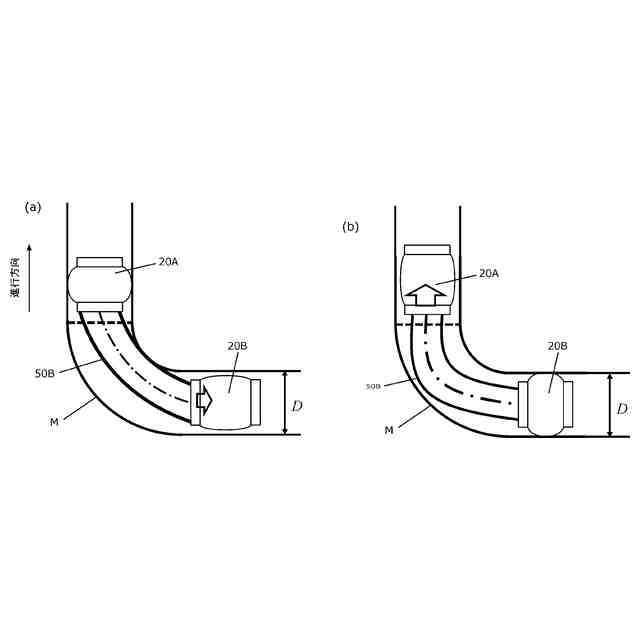
走行部が管に設けられた曲管部を通過するときの模式図である。
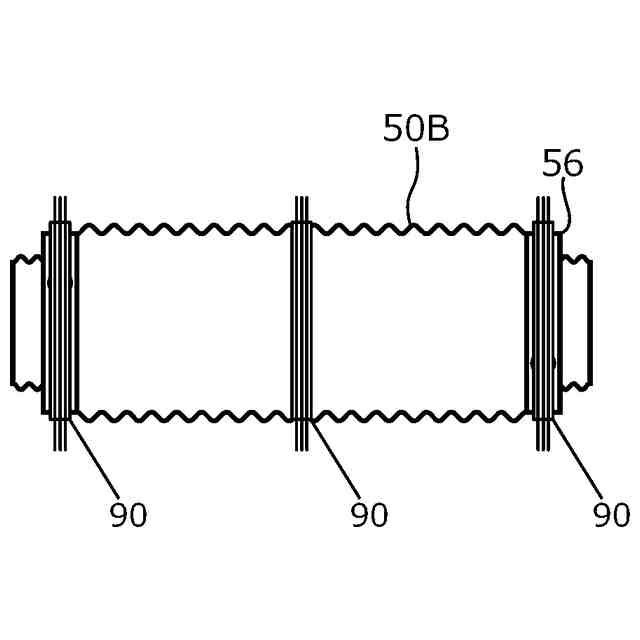
走行部の構成を示す図である。
支持手段の一例を示す図である。
伸縮ユニットが曲管部を通過するときの模式図である。
支持手段を備えた伸縮ユニットが曲管部を通過するときの模式図である。
【0008】
以下、発明の実施形態を通じて本発明を詳説するが、以下の実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態の中で説明される特徴の組み合わせのすべてが発明の解決手段に必須であるとは限らず、選択的に採用される構成を含むものである。
【発明を実施するための形態】
【0009】
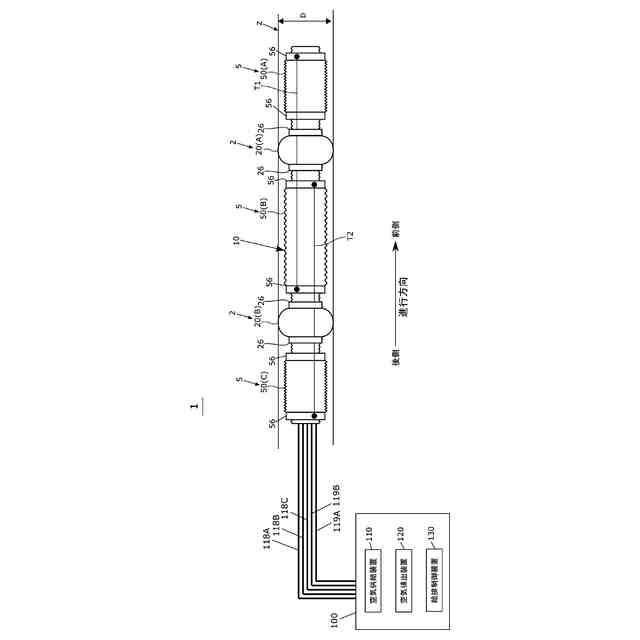
以下、本発明の実施の形態について、各図に基づき説明する。図1は、本実施形態に係る管内移動ロボット1の一実施形態を示す概略構成図である。
管内移動ロボット1は、概略、移動体としての走行部10と、走行部10の動作を制御する制御手段としての制御部100とを備える。
【0010】
図1に示すように、走行部10は、管z内に設けられ、管zの内壁を走行面として管z内を移動する実質的なロボットとして機能する。
走行部10は、管径方向に膨張することにより管zの内壁面との間に摩擦力を生じさせ、管zの内壁を把持する把持部2と、管軸方向に伸縮することにより推進力を生じさせる推進力発生部5とを備える。把持部2及び推進力発生部5は、例えば、図1に示すように、交互に設けられる。本実施形態では、走行部10は、把持部2が推進力発生部5の間に配置されるように、2つの把持部2と、3つの推進力発生部5とを直列に連結されたものとして説明する。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
学校法人 中央大学
支援具
17日前
学校法人 中央大学
ナノ粒子検出方法
1か月前
学校法人 中央大学
位置推定装置、位置推定方法、及び位置推定プログラム
1か月前
学校法人 中央大学
生体情報推定装置、生体情報推定方法、及び生体情報推定プログラム
1か月前
日本電信電話株式会社
バイオセンサおよびバイオセンサの製造方法
2か月前
学校法人 中央大学
情報処理装置、情報処理方法、及びプログラム
1か月前
個人
釘抜き機
5か月前
株式会社フジキン
レンチ
6か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
16日前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
UTM株式会社
搬送装置
5か月前
個人
ペットボトル用蓋開け具。
5か月前
株式会社右川ゴム製造所
把持装置
25日前
川崎重工業株式会社
ハンド
2か月前
個人
ロボットシステム
4か月前
トヨタ自動車株式会社
関節機構
4か月前
トヨタ自動車株式会社
関節機構
4か月前
学校法人立命館
ロボットハンド
1か月前
学校法人立命館
グリッパ
1か月前
株式会社不二越
ロボット
6か月前
株式会社不二越
ロボット
4か月前
個人
作業台
5か月前
オムロン株式会社
ロボットハンド
6か月前
個人
プーリーキー抜き治具
1か月前
株式会社不二越
予測システム
2か月前
株式会社近藤製作所
ロータリージョイント
6か月前
川崎重工業株式会社
ロボット
6か月前
国立大学法人東北大学
剛性可変連結体
5か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
株式会社ダイヘン
画像生成装置
25日前
学校法人 中央大学
管内移動ロボット
6か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社共和製作所
ロボット用アーム
3日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ