TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024044954
公報種別
公開特許公報(A)
公開日
2024-04-02
出願番号
2022164330
出願日
2022-09-21
発明の名称
把持装置
出願人
株式会社右川ゴム製造所
代理人
主分類
B25J
15/08 20060101AFI20240326BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】本発明の目的は、伸長方向に伸縮可能なアクチュエータを用いた把持装置を改良し、印加圧力に対し大きな把持力を発揮する把持装置を実現することにある。
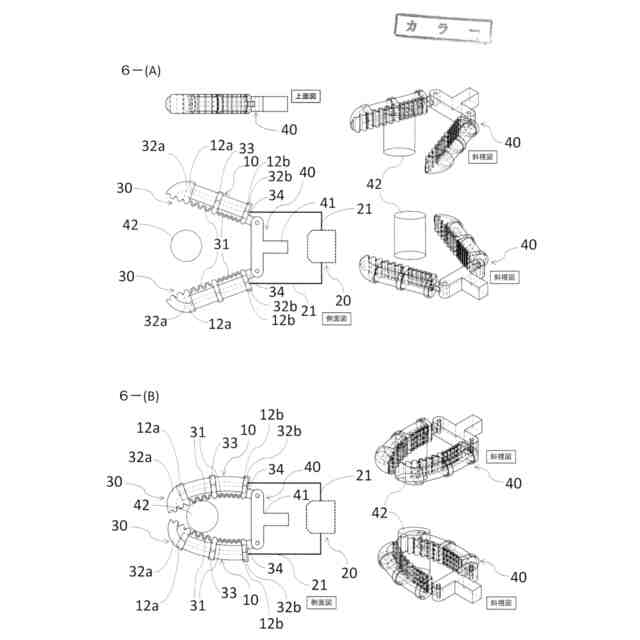
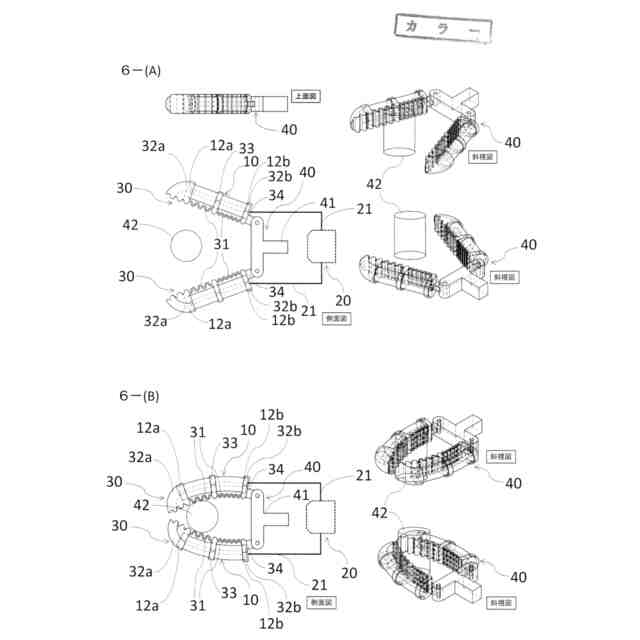
【解決手段】本発明は、把持対象物に当接して使用される把持装置であって、流体圧力の印加により伸長し、前記流体圧力の開放により収縮する、可撓性を有するアクチュエータと、長さ方向の伸長量が小さく且つ可撓性を有する当接部材とを組み合わせてなる構造の把持装置であり、把持装置の骨格部分となる当接部材を曲がりやすい波型構造にすることによって前記印加流体圧に対して大きな把持力を発揮することを特徴とする把持装置である。
【選択図】図6
特許請求の範囲
【請求項1】
把持対象物に当接して使用される把持装置であって、流体圧力の印加により伸長し、前記流体圧力の開放により収縮する、可撓性を有するソフトアクチュエータと、可撓性と弾性復元性を有する当接部材とを組み合わせてなる構造の把持装置であり、前記アクチュエータは前記当接部材の長さ方向に沿って配設され且つ当接部材に対して前記長さ方向の複数箇所で互いに離反しないように結合され、その結合箇所のうち2以上は前記長さ方向への位置ずれ規制結合箇所とされ、前記流体圧力の印加時には、伸長する前記アクチュエータと外力による長さ方向の伸長量が小さい前記当接部材との伸長量の差により、前記組み合わせ構造全体としては当接部材の側に向かって反る様に曲がる動作となり、前記流体圧力の開放時には、前記当接部材の弾性復元力により直ちに前記組み合わせ構造の原型状態に戻ることを特徴とする把持装置。
続きを表示(約 520 文字)
【請求項2】
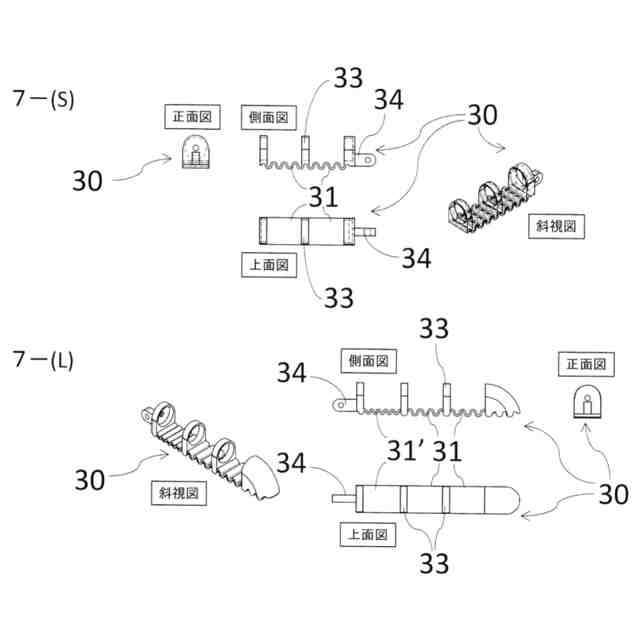
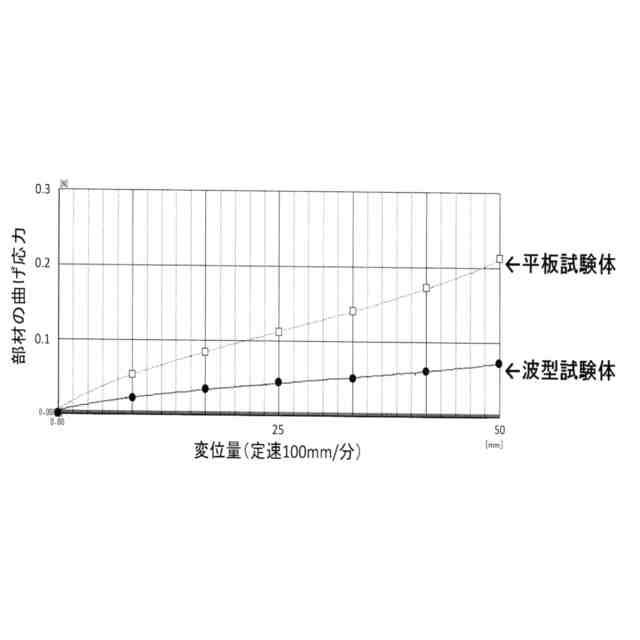
前記当接部材の長さ方向の所定の位置について一部もしくは全部を波型に成形しており、前記アクチュエータを伸長させて把持動作を行う時に、波型部位が平板状の部位と比較して低荷重で撓むことを特徴とする把持装置。
【請求項3】
前記当接部材の長さ方向の所定の位置について一部もしくは全部を波型に成形しており、前記アクチュエータを伸長させて把持動作を行う時に、当接部材の撓み変形の動きが前記長さ方向とアクチュエータ伸長方向とを含む面内に制限されることを特徴とする把持装置。
【請求項4】
前記当接部材の長さ方向の所定の位置について一部もしくは全部を波型に成形しており、前記アクチュエータを伸長させて把持動作を行う時に、把持対象物を低荷重で包み込むような形態で把持することで前記把持対象物本来の形状を保持しながら把持することを特徴とする把持装置。
【請求項5】
前記当接部材の長さ方向の所定の位置について一部もしくは全部を波型に成形しており、前記アクチュエータを伸長させて把持動作を行う時に、波型部位の凹凸が把持対象物の凹凸を引っ掛けて把持することで搬送が可能であることを特徴とする把持装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は伸長方向に伸縮可能なソフトアクチュエータを用いた把持装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
ソフトアクチュエータとは、軽量で柔軟な材料が変形することによりアクチュエータとして機能する材料、素子、デバイスのことである。これらソフトアクチュエータは人工筋肉とも呼ばれ、小型軽量、様々な駆動源、無音、極限条件・水中や大気中で動くなどの特徴があり、近年、開発が求められているリハビリや介護あるいは作業補助用のパワーアシスト用ウエアラブルロボットや医療手術支援ロボットなどの動力源として大きな期待がかけられている。
【0003】
こうしたソフトアクチュエータの具体的な応用形態のひとつとして、ロボットの一部または全てを柔軟にすることで本質的安全性と生き物のような適応力をロボットに付与する、いわゆるソフトロボティクス技術がある。こうした技術体系においては、多関節ロボットや、スカラロボットなどのアーム先端に取り付けられ、対象物に対し作業をするエンドエフェクタについてもソフトネス(柔軟性)を付与する必要がある。
【0004】
ソフトネスを付与したエンドエフェクタの実践例のひとつとして、人工筋肉を用いた把持装置が挙げられる(特許文献1参照)。上記文献での構成によれば、流体圧力の印加により伸長し且つ撓みを許容するソフトアクチュエータ内に流体、例えば加圧空気などを供給すると、ソフトアクチュエータは長さ方向に伸長しようとする。このとき、アクチュエータに取付けられた当接部材の伸長量はアクチュエータの伸長量よりも小さく、また当接部材は伸長しようとするアクチュエータと2以上の位置ずれ規制結合箇所で長さ方向にずれないように結合されているので、共に可撓性を有するアクチュエータと当接部材は一緒に当接部材側に曲がる。したがって、この曲がる方向を接触対象物に当接する方向として接触対象物の両側にユニットを配設すれば、例えば、ものを掴む装置に用いることが可能となる。
【先行技術文献】
【特許文献】
【0005】
特開2022-57312号公報(段落0006~0023、図1~4)
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1にて示す構成は単純構造、軽量でありながら高い把持性能を示すが、その一方で上記文献の段落0016に示すように、上記当接部材の長さ方向の所定位置に曲げ剛性の大きい節部を設けることにより、上記曲がり動作時の各部位の曲がり角度を調節する構成となっている。しかし曲げ剛性の大きな部位を設けたことで変形に要する荷重が大きくなることからアクチュエータにより高い流体圧を印加して大きな伸長力を発揮させることが必要となる。このため流体圧印加のための装置、具体的にはエアコンプレッサやレギュレータ、エアタンクといった装置がより大型化する。
【0007】
本発明の目的は、上記当接部材の構造設計を曲がる方向へは低剛性・低弾性、方曲がらない方向へは高剛性・高弾性の構成とすることにより曲がり動作に要する荷重を減少させることで(1)印加圧力に対し大きな把持力を発揮し、(2)従来の把持装置と比較して動作に必要なエネルギーが小さく(3)システム全体のコストダウンを実現した新規な把持装置を実現することにある。
【課題を解決するための手段】
【0008】
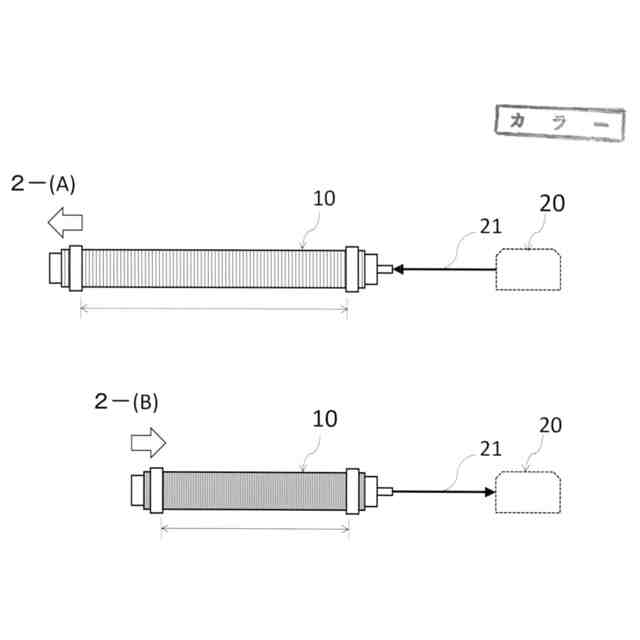
本発明は、把持対象物に当接して使用される把持装置であって、流体圧力の印加により伸長し、前記流体圧力の開放により収縮する、可撓性を有するソフトアクチュエータと、可撓性と弾性復元性を有する当接部材とを組み合わせてなる構造の把持装置であり、前記アクチュエータは前記当接部材の長さ方向に沿って配設され且つ当接部材に対して前記長さ方向の複数箇所で互いに離反しないように結合され、その結合箇所のうち2以上は前記長さ方向への位置ずれ規制結合箇所とされ、前記流体圧力の印加時には、伸長する前記アクチュエータと外力による長さ方向の伸長量が小さい前記当接部材との伸長量の差により、前記組み合わせ構造全体としては当接部材の側に向かって反る様に曲がる動作となり、前記流体圧力の開放時には、前記当接部材の弾性復元力により直ちに前記組み合わせ構造の原型状態に戻ることを特徴とする把持装置である。
【0009】
また、前記当接部材の長さ方向の所定の位置について一部もしくは全部を波型に成形しており、前記アクチュエータを伸長させて把持動作を行う時に、波型部位が平板状の部位と比較して低荷重で撓むことを特徴とする把持装置である。
【0010】
また、前記当接部材の長さ方向の所定の位置について一部もしくは全部を波型に成形しており、前記アクチュエータを伸長させて把持動作を行う時に、当接部材の撓み変形の動きが前記長さ方向とアクチュエータ伸長方向とを含む面内に制限されることを特徴とする把持装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
3か月前
個人
関節モジュール
2か月前
個人
寸切りボルト回し
2か月前
個人
スロットルトリガー
3か月前
日東精工株式会社
搬送装置
7か月前
中国電力株式会社
腰袋
6か月前
株式会社ツノダ
挟持工具
8か月前
太陽工業株式会社
チャック装置
2か月前
コクヨ株式会社
補助器具
2か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
衝撃工具
5か月前
株式会社右川ゴム製造所
把持装置
8か月前
個人
メンテナンス用スタンド
4か月前
株式会社マキタ
動力工具
6か月前
CKD株式会社
把持装置
3か月前
川崎重工業株式会社
罫書用治具
5か月前
株式会社マキタ
打撃工具
20日前
トヨタ自動車株式会社
ロボット
3か月前
学校法人立命館
グリッパ
3か月前
東京計器株式会社
接触検知装置
3か月前
オムロン株式会社
電動把持工具
2か月前
個人
容器引っ掛け棒およびその使用方法
4か月前
株式会社ハーモ
開閉チャック装置
4か月前
白山工業株式会社
ロボットアーム
3か月前
株式会社ダイヘン
制御装置
28日前
トヨタ自動車株式会社
ハンド構造
5か月前
株式会社ダイヘン
搬送装置
6か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社エビス
携帯付属物取付具
20日前
株式会社ダイヘン
搬送装置
6か月前
株式会社ダイヘン
搬送装置
20日前
個人
回転工具およびバリ取り部品
3か月前
株式会社マキタ
電動ハンマ
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ


































