TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024052167
公報種別
公開特許公報(A)
公開日
2024-04-11
出願番号
2022158703
出願日
2022-09-30
発明の名称
搬送装置
出願人
日東精工株式会社
代理人
主分類
B25J
15/08 20060101AFI20240404BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ワークの姿勢関係なく取り出し可能に構成された搬送装置を提供する。
【解決手段】
本発明は、略円板形状のワーク100を把持可能な把持部34を多関節ロボット30によって移動させ、前記把持部34は、ワーク100の外周面を把持する外周把持チャック35およびワーク100の平面を把持する平面把持チャック36を備え、前記外周把持チャック35および平面把持チャック36の中心軸が一致するように配置されていることを特徴とする搬送装置10による。また、前記多関節ロボット30は先端に把持部を回転させる把持部回転手段33を備えており、前記外周把持チャック35および平面把持チャック36は、前記中心軸が前記把持部回転手段33の回転軸と一致するように配置されていてもよい。
【選択図】図2
特許請求の範囲
【請求項1】
略円板形状のワークを把持可能な把持部を多関節ロボットによって移動させる搬送装置において、
前記把持部は、ワークの外周面を把持する外周把持チャックおよびワークの平面を把持する平面把持チャックを備え、
前記外周把持チャックおよび平面把持チャックの中心軸が一致するように配置されていることを特徴とする搬送装置。
続きを表示(約 540 文字)
【請求項2】
前記多関節ロボットは先端に把持部を回転させる把持部回転手段を備えており、
前記外周把持チャックおよび平面把持チャックは、前記中心軸が前記把持部回転手段の回転軸と一致するように配置されていることを特徴とする請求項1に記載の搬送装置。
【請求項3】
所定の位置に設置されたワークを撮像する撮像手段と、当該撮像手段の撮像結果を基にワークの方向を判別可能な制御手段とを備え、
前記制御手段は、前記把持部が前記ワークと同じ方向を向くように前記把持部回転手段を回転駆動させること特徴とする請求項2に記載の搬送装置。
【請求項4】
前記ワークには、軸線方向に貫通する中心穴を備えており、
前記平面把持チャックは、ワークを把持する把持爪が前記外周把持チャックの把持爪より先端側に突出しているとともに、前記平面把持チャックの把持爪が前記ワークの中心穴に挿通可能な大きさに構成されていることを特徴とする請求項1に記載の搬送装置。
【請求項5】
前記把持部は、前記平面把持チャックまたは前記外周把持チャックにワークが把持されているか否かを検出可能な検出センサを備えていることを特徴とする請求項1に記載の搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、円環形状のワークを搬送する搬送装置に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、円環形状のワークを搬送する搬送装置として、特許文献1および2に開示するものが知られている。特許文献1に開示される搬送装置は、ワークを把持する把持手段と、把持手段を移動させるロボットハンド等の移動手段とを備えており、前記把持手段は、前記ワークの貫通穴内部に送通可能かつ貫通穴内部で開閉可能な爪部を有している。このように構成された搬送装置は、平置きされたワークの貫通穴に前記把持手段の爪部を送通後に当該爪部を開けることで、ワークを把持することが可能であり、その状態で移動手段を駆動することでワークの搬送が可能となっていた。
【0003】
一方、特許文献2に開示される搬送装置は、ワークを把持する把持手段として、ワークの外周と挟持可能に揺動する揺動爪を備えており、この揺動爪が閉じることでワークを揺動爪の間に挟み保持することが可能に構成されていた。また揺動爪には、ワークと当接する位置決めピンが設けられており、当該揺動爪に挟持されたワークが位置決めされていた。これらからワークを正確な位置に搬送可能であった。
【先行技術文献】
【特許文献】
【0004】
実開平02-104990号公報
実開平04-051388号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述の搬送装置は、水平面上に平置きされたワークを取り出すことしかできなかった。そのため、板状部材を搬送する搬送装置では、平置きされたワークの待機場所が広くなり、装置が大きくなるという問題は発生する。また、ワークを立設させて待機させると、別途立設されたワークを取り出し、所定の仮置き位置まで搬送する手段が必要となり、制御が複雑化するという問題が発生する。
【0006】
そのため、本発明は、ワークの姿勢関係なく取り出し可能に構成された搬送装置の提供を目的とする。
【課題を解決するための手段】
【0007】
この目的を達成するために本発明は、略円板形状のワークを把持可能な把持部を多関節ロボットによって移動させる搬送装置において、前記把持部は、ワークの外周面を把持する外周把持チャックおよびワークの平面を把持する平面把持チャックを備え、前記外周把持チャックおよび平面把持チャックの中心軸が一致するように配置されていることを特徴とする。前記多関節ロボットは先端に把持部を回転させる把持部回転手段を備えており、前記外周把持チャックおよび平面把持チャックは、前記中心軸が前記把持部回転手段の回転軸と一致するように配置されていることが好ましい。所定の位置に設置されたワークを撮像する撮像手段と、当該撮像手段の撮像結果を基にワークの方向を判別可能な制御手段とを備え、前記制御手段は、前記把持部が前記ワークと同じ方向を向くように前記把持部回転手段を回転駆動させることが好ましい。前記ワークには、軸線方向に貫通する中心穴を備えており、前記平面把持チャックは、ワークを把持する把持爪が前記外周把持チャックの把持爪より先端側に突出しているとともに、前記平面把持チャックの把持爪が前記ワークの中心穴に挿通可能な大きさに構成されていることが好ましい。前記把持部は、前記平面把持チャックまたは前記外周把持チャックにワークが把持されているか否かを検出可能な検出センサを備えていることが好ましい。
【発明の効果】
【0008】
上記発明によれば、ワークの外周面を把持する外周把持チャックおよびワークの平面を把持する平面把持チャックを備えているため、ワークが水平な状態であっても立設された状態であっても把持可能となる。このようにワークの姿勢に関係なく把持することが出来るため、所定の待機位置に比較的多くのワークを待機させることが可能となり、作業効率が向上する等の利点がある。また、前記チャックが同一軸線上に配置されているため、多関節ロボットの位置制御が複雑にならないという利点も有する。なお、前記多関節ロボットは先端に把持部を回転させる把持部回転手段を備えており、前記チャックが当該把持部回転手段の回転軸上に配置されていることで、回転半径が小さくなり装置を比較的小さることが可能等の利点もがある。また、前記把持部回転手段が撮像手段で撮影したワークと同じ方向に把持部を回転させることにより、待機位置でワークの向きを設定する必要がなくなり、作業者の負担が低減する等の利点もある。さらに、平面把持チャックの把持爪がワークの中心穴を挿通可能であることにより、把持部を比較的小さくすることが可能となる等の利点もある。しかも、前記把持部が検出センサを備えていることにより、ワークの有無を即座に検出でき、サイクルタイムが向上する等の利点もある。
【図面の簡単な説明】
【0009】
本発明に係る搬送装置の構造を示す概略正面図である。
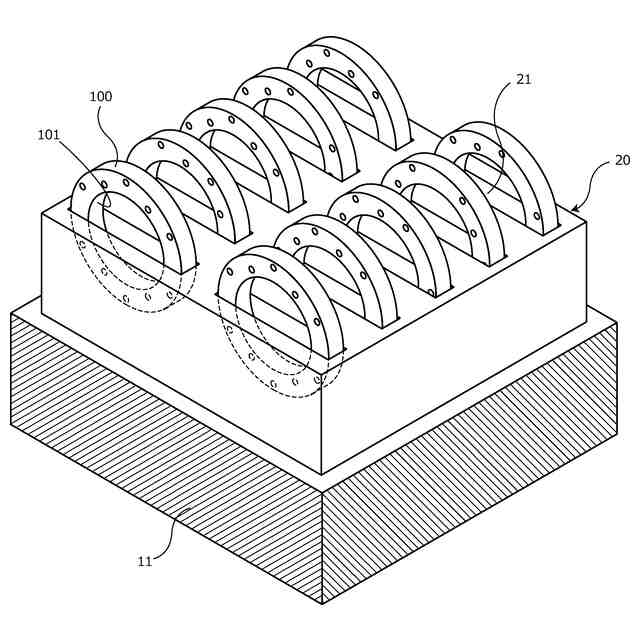
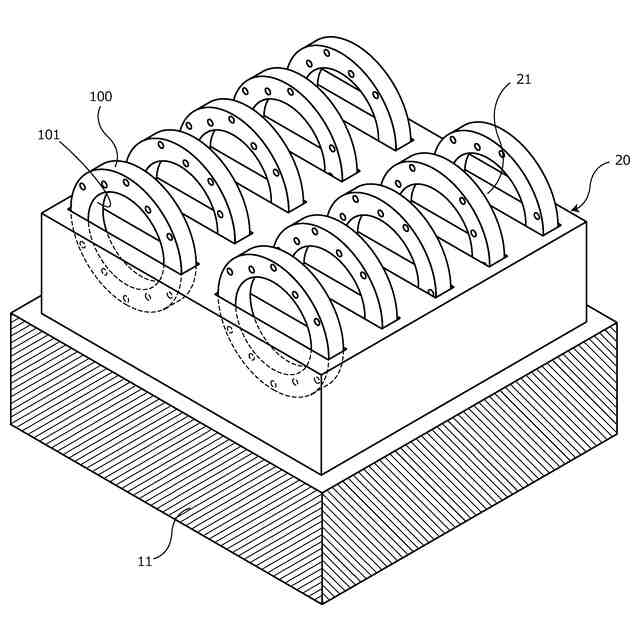
本発明に係る保持トレーの構造を示す斜視図である。
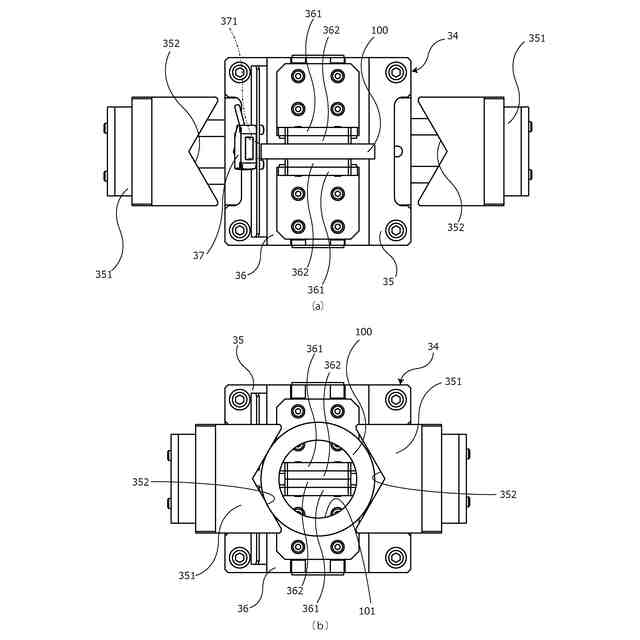
本発明に係る把持部の構造を示す要部拡大正面図である。
本発明に係る把持部の動作を示す動作説明図であり、(a)は平面把持チャックがワークを把持している状態を示す要部拡大底面図であり、(b)は外周把持チャックがワークを把持している状態を示す要部拡大底面図である。
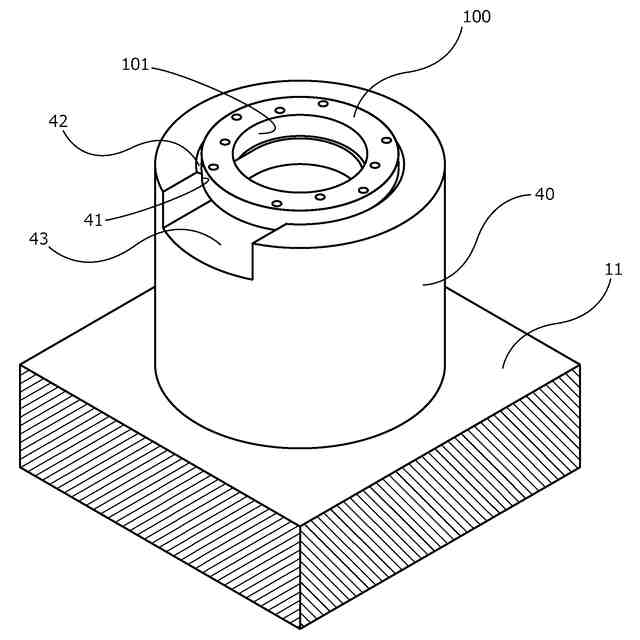
本発明に係る仮置き治具の構造を示す斜視図である。
本発明に係る搬送装置が仮置き治具上にワークを設置する状態を示す要部拡大平面図である。
本発明に係る搬送装置が仮置き治具上のワークを回収する状態を示す要部拡大正面図である。
【発明を実施するための形態】
【0010】
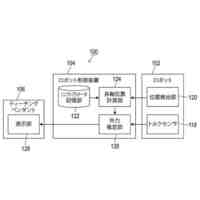
以下、本発明の実施形態を図面に基づき説明する。図1において10は、ワーク100を搬送する搬送装置である。この搬送装置10は、ワーク100を多数貯留可能な保持トレー20と、この保持トレー20からワーク100を抜き出す多関節ロボット30と、前記ワーク100を所定の角度に修正する仮置き治具40と、各部の駆動を制御する制御手段50を備えており、供給位置(図示せず)に前記ワーク100を所定の向きで供給するように構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
3日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社マキタ
電動工具
11日前
株式会社マキタ
打撃工具
2か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社エビス
携帯付属物取付具
3か月前
川崎重工業株式会社
ロボットリスト
11日前
川崎重工業株式会社
ロボットアーム
11日前
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボット
2か月前
日本車輌製造株式会社
締め付け工具
11日前
川崎重工業株式会社
ロボットアーム
11日前
川崎重工業株式会社
ロボット
2か月前
学校法人立命館
ロボットハンド
2か月前
CKD株式会社
吸着型搬送装置
25日前
川崎重工業株式会社
ロボットシステム
11日前
長堀工業株式会社
締結装置
1か月前
ジヤトコ株式会社
圧入装置
24日前
株式会社アイエイアイ
グリッパー
2か月前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
株式会社不二越
ロボットの操作装置
2か月前
株式会社山下工業研究所
ラチェットレンチ
2か月前
株式会社アマダ
磁気吸着装置
1か月前
株式会社スター精機
ワーク搬送装置
今日
モトコマ株式会社
寄せポンチホルダー
12日前
株式会社不二越
協働ロボットシステム
2か月前
株式会社マキタ
電動作業機
3か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ