TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024164671
公報種別
公開特許公報(A)
公開日
2024-11-27
出願番号
2023080329
出願日
2023-05-15
発明の名称
協働ロボットシステム
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
19/06 20060101AFI20241120BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットが受けた外力の位置と大きさを推定することができ、安全性を向上させることができる協働ロボットシステムを提供する。
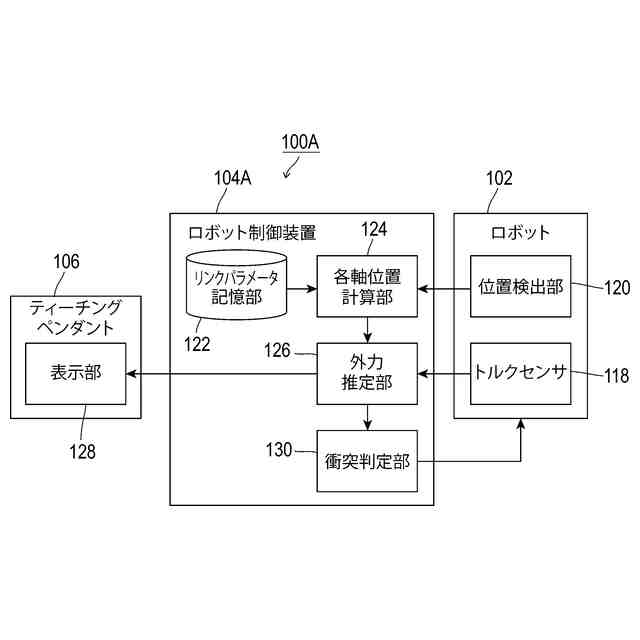
【解決手段】協働ロボットシステム100は、複数のアームを有するロボット102と、ロボットの各軸に設けられた位置検出部120およびトルクセンサ118と、各アームの長さを含むリンクパラメータを記憶したリンクパラメータ記憶部122と、各軸の位置を、多軸ロボットの設置面に近い軸から順に、軸の位置とリンクパラメータとを用いて計算する各軸位置計算部124と、外力推定部126とを有し、外力推定部は、トルクセンサで検出された各軸のトルクを、各軸位置計算部で計算された各軸の位置に基づいて三次元の軸回転成分に分解し、軸回転成分ごとに、各軸ごとの外力の位置と大きさを未知数とする方程式を立て、これを連立方程式として解くことによって多軸ロボットが受けた外力の位置と大きさを推定する。
【選択図】図2
特許請求の範囲
【請求項1】
複数のアームを有する多軸ロボットと、
前記多軸ロボットの各軸に設けられた位置検出部と、
前記多軸ロボットの各軸に設けられるとともに各軸のトルクを検出するトルクセンサと、
前記多軸ロボットの動作を制御するロボット制御装置とを備え、
前記ロボット制御装置は、
各アームの長さを含むリンクパラメータを記憶したリンクパラメータ記憶部と、
各軸の位置を、前記多軸ロボットの設置面に近い前記軸から順に、前記位置検出部で検出された前記軸の位置と前記リンクパラメータ記憶部から読み出した前記リンクパラメータとを用いて計算する各軸位置計算部と、
前記多軸ロボットが受けた外力の位置と大きさを推定する外力推定部とを有し、
前記外力推定部は、
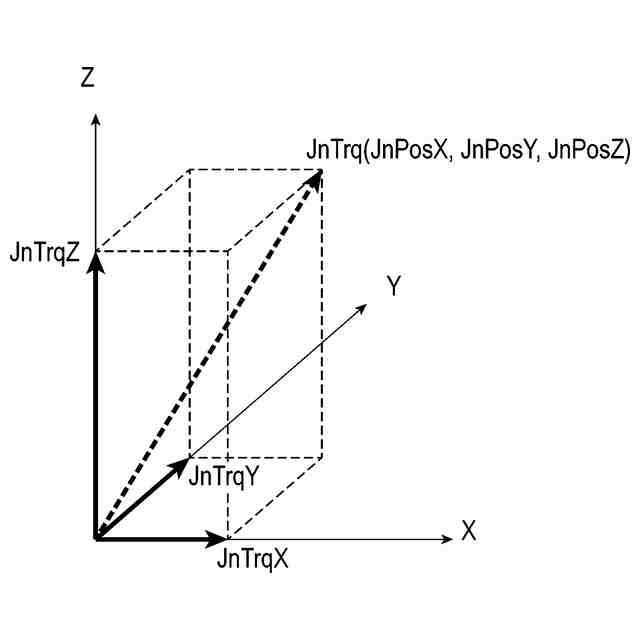
前記トルクセンサで検出された各軸のトルクを、前記各軸位置計算部で計算された前記各軸の位置に基づいて三次元の軸回転成分に分解し、
前記軸回転成分ごとに、各軸ごとの外力の位置と大きさを未知数とする方程式を立て、これを連立方程式として解くことによって外力の位置と大きさを推定することを特徴とする協働ロボットシステム。
続きを表示(約 98 文字)
【請求項2】
前記ロボット制御装置は、前記外力が基準値を超える場合に、前記多軸ロボットに停止命令を送信する衝突判定部を備えることを特徴とする請求項1に記載の協働ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、安全機能を有する協働ロボットシステムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
人間と作業領域を共有する産業用ロボット、いわゆる協働ロボットでは安全対策が求められる。協働ロボットに求められる安全性の基準として、ISO10218-1から参照される技術仕様ISO/TS15066においては、人体の各部位と接触した際(衝突時)の安全な「力」を規定している。
【0003】
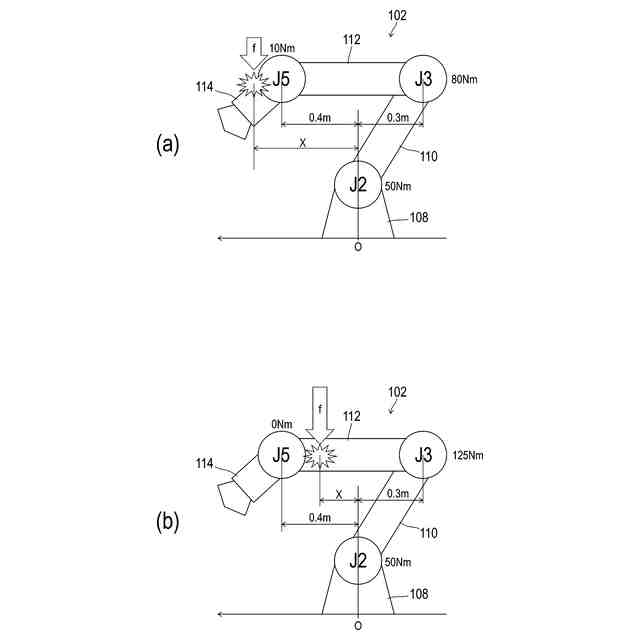
協働ロボットは、複数のアームを有する多軸ロボットが用いられるのが一般的であり、その各軸には例えばトルクを検出するトルクセンサが設けられている。尚、トルクは、回転中心からの長さに「力」を乗じることで得られる値である。このため、トルクセンサを設けた協働ロボットでは、同じトルクであっても、回転中心に近い位置で強い力を受けたのか、あるいは回転中心から遠い位置で弱い力を受けたのかを判別することができない。
【0004】
特許文献1には、ロボットの各関節(各軸)の少なくとも1つに回転軸回りのトルクを検出するトルクセンサを設けたロボットシステムが記載されている。このロボットシステムでは、トルクセンサによってX軸、Y軸、Z軸の各軸方向の力成分や、回転軸周りに作用するトルク成分を検出することにより、ロボットが受ける外力を検出する。また、トルクセンサに代えて力覚センサを用いてもよいことが記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2022-15850号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし特許文献1のロボットシステムは、ロボットが受けた力やモーメントをトルクセンサや力覚センサによって検出するものに過ぎない。このため、トルクセンサを用いた場合は、外力を受けた位置(衝突位置)や力を推定することができない、という問題がある。また力覚センサで検出する場合は、力を検出することはできるものの、力がかかっていることを検知できる場所がそもそも限定されてしまう、という問題がある。
【0007】
本発明は、このような課題に鑑み、ロボットが受けた外力の位置と大きさを推定することができ、安全性を向上させることができる協働ロボットシステムを提供することを目的としている。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明にかかる協働ロボットシステムの代表的な構成は、複数のアームを有する多軸ロボットと、多軸ロボットの各軸に設けられた位置検出部と、多軸ロボットの各軸に設けられるとともに各軸のトルクを検出するトルクセンサと、多軸ロボットの動作を制御するロボット制御装置とを備え、ロボット制御装置は、各アームの長さを含むリンクパラメータを記憶したリンクパラメータ記憶部と、各軸の位置を、多軸ロボットの設置面に近い軸から順に、位置検出部で検出された軸の位置とリンクパラメータ記憶部から読み出したリンクパラメータとを用いて計算する各軸位置計算部と、多軸ロボットが受けた外力の位置と大きさを推定する外力推定部とを有し、外力推定部は、トルクセンサで検出された各軸のトルクを、各軸位置計算部で計算された各軸の位置に基づいて三次元の軸回転成分に分解し、軸回転成分ごとに、各軸ごとの外力の位置と大きさを未知数とする方程式を立て、これを連立方程式として解くことによって外力の位置と大きさを推定することを特徴とする。
【0009】
上記のロボット制御装置は、外力が基準値を超える場合に、多軸ロボットに停止命令を送信する衝突判定部を備えることが好ましい。
【発明の効果】
【0010】
本発明によれば、ロボットが受けた外力の位置と大きさを推定することができ、安全性を向上させることができる協働ロボットシステムを提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
歯車研削盤
4日前
株式会社不二越
減速機用回転部品
14日前
株式会社不二越
液圧駆動システム
1か月前
株式会社不二越
歯切工具およびその製造方法
24日前
株式会社不二越
回転軸付きスカイビングカッタ
4日前
株式会社不二越
斜板式可変容量型ピストンポンプ
11日前
株式会社不二越
ソレノイドバルブ用互換スペーサ
18日前
株式会社不二越
オフラインダイレクトティーチング装置
18日前
株式会社不二越
スカイビングカッタおよびそれを用いた歯車加工治具
18日前
株式会社不二越
回転センサ付き軸受装置
18日前
株式会社不二越
転がり軸受部品用合金鋼,転がり軸受用軌道輪,転がり軸受および転がり軸受用軌道輪の製造方法
28日前
個人
腰袋
3日前
株式会社マキタ
電動工具
11日前
日本車輌製造株式会社
締め付け工具
11日前
川崎重工業株式会社
ロボットアーム
11日前
川崎重工業株式会社
ロボットアーム
11日前
川崎重工業株式会社
ロボットリスト
11日前
川崎重工業株式会社
ロボットシステム
11日前
CKD株式会社
吸着型搬送装置
25日前
川崎重工業株式会社
塗装ロボット
1か月前
ジヤトコ株式会社
圧入装置
24日前
長堀工業株式会社
締結装置
1か月前
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
株式会社スター精機
ワーク搬送装置
今日
株式会社アマダ
磁気吸着装置
1か月前
トヨタ自動車株式会社
制御装置及び制御方法
11日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
3日前
モトコマ株式会社
寄せポンチホルダー
12日前
有限会社松尾エンジニアリング
連結部材
12日前
株式会社DailyColor
ロボットハンド
12日前
株式会社マキタ
電動工具用集塵システム
1か月前
個人
ターンバックル用工具
18日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ