TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023179081
公報種別
公開特許公報(A)
公開日
2023-12-19
出願番号
2022092141
出願日
2022-06-07
発明の名称
ロボット
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
19/06 20060101AFI20231212BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ツールの荷重を検出する力センサの故障を簡単な構成かつ短時間にて検出することができるロボットを提供する。
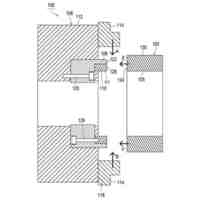
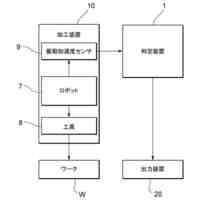
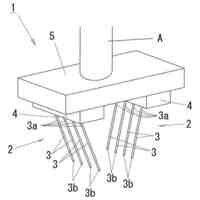
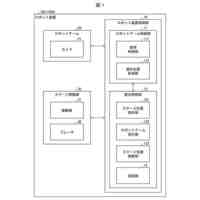
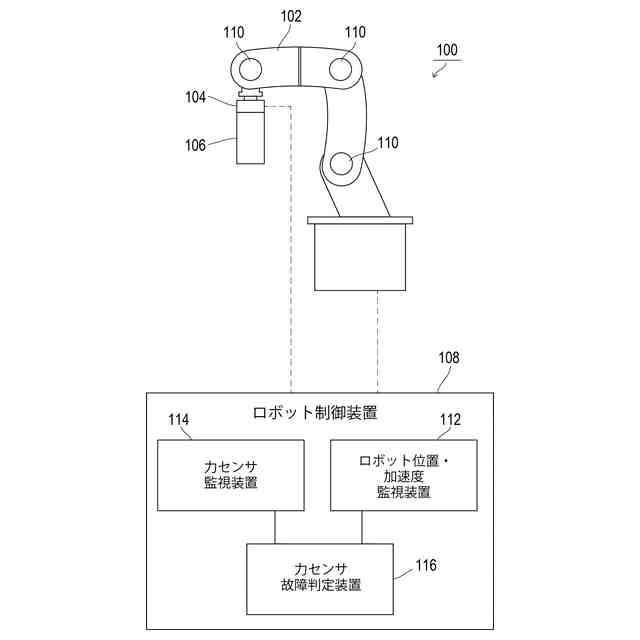
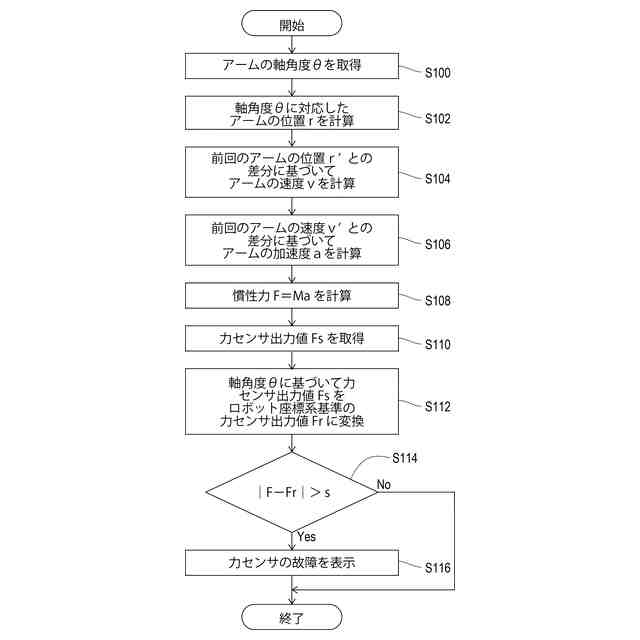
【解決手段】本発明にかかるロボット100は、アーム102と、アームに備えられた力センサ104と、アームに力センサを介して装着されるツール106と、アームの動作を制御するロボット制御装置108と、を備え、ロボット制御装置は、力センサの出力値を取得すると共に、ツールおよび力センサの合計質量とアームの動作による加速度とから力センサにかかる慣性力の算出値を求め、出力値と算出値とを比較して、その差分が所定の閾値を超えた場合に力センサの故障を検出することを特徴とする。
【選択図】図1
特許請求の範囲
【請求項1】
アームと、
前記アームに備えられた力センサと、
前記アームに前記力センサを介して装着されるツールと、
前記アームの動作を制御する制御装置と、を備え、
前記制御装置は、前記力センサの出力値を取得すると共に、前記ツールおよび前記力センサの合計質量と前記アームの動作による加速度とから前記力センサにかかる慣性力の算出値を求め、前記出力値と前記算出値とを比較して、その差分が所定の閾値を超えた場合に前記力センサの故障を検出することを特徴とするロボット。
続きを表示(約 270 文字)
【請求項2】
前記制御装置は、前記出力値と前記算出値との比較を、前記力センサを用いた作業の前に実施することを特徴とする請求項1に記載のロボット。
【請求項3】
前記制御装置は、前記出力値と前記算出値との差分を検出可能な加速度で前記アームを動作させて、前記出力値と前記算出値とを比較することを特徴とする請求項1に記載のロボット。
【請求項4】
前記制御装置は、前記力センサが検出可能な全方向に前記アームを動作させて、前記出力値と前記算出値とを比較することを特徴とする請求項1に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、アームに備えられた力センサの故障を検出するロボットに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
一例として工場等の生産現場では、アームを有するロボットが用いられている。アームは、その各関節に設けられたアクチュエータである電動モータを有する。電動モータは、駆動信号によって駆動され、アームの目標とする動作を実現する。またアームの先端には、ツールが装着されている。ツールは、例えばワークの研磨や面取りなどの作業を行うためのエンドエフェクタである。
【0003】
従来からツール(エンドエフェクタ)にかかる力を測定する力センサを設ける場合があり、さらに力センサの故障(異常)を検出するための構成が知られている。特許文献1には、ロボットが記載されている。ロボットは、ロボットアームと、ロボットアームの先端に装着され把持力センサを有するエンドエフェクタと、ロボットアームの基台と被設置部との間に配置されている第1部材および第2部材と、第1部材および第2部材の双方に接する第1力センサおよび第2力センサとを備える。このロボットでは、第1力センサの出力と第2力センサの出力との差に基づいて、第1力センサまたは第2力センサの異常を検出する。
【0004】
特許文献2には、脚式移動ロボットが記載されている。脚式移動ロボットは、基体と、基体に連結される複数本の脚部と、複数本の脚部のそれぞれの先端に連結される足部と、力センサとを備えている。この力センサは、足部と脚部との間に配置され、足部が接地する床面から作用する床反力を示す出力を生じる。
【0005】
特許文献2に記載の脚式移動ロボットでは、ロボットを起動させるときに足踏み動作を行うようにロボットの動作を制御し、足踏み動作のときの力センサの出力が所定の範囲内にあるか否か判定し、その判定結果に基づいて力センサの異常を検知している。
【先行技術文献】
【特許文献】
【0006】
特開2020-019067号公報
特開2006-082201号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1のロボットは、ロボットアームの基台と被設置部との間に配置されている第1部材および第2部材に接する第1力センサまたは第2力センサの異常を検出するものである。よって、このロボットでは、全く同じ力を検出するセンサが2つ必要になってしまう。
【0008】
特許文献2の脚式移動ロボットは、足部と脚部との間に配置された力センサの故障を検出するものである。この脚式移動ロボットでは、力センサの故障を検出するために、力センサを用いた作業をする必要があるため、仮に力センサが故障していた場合、床の反力が正常に検出できず、ロボットが転倒するおそれがある。さらに足踏み動作という本来不必要な動作をさせる必要があるため、余計な時間がかかってしまう。
【0009】
さらに特許文献1、2は、ツールの荷重を検出する力センサの故障を検出する点については考慮されていない。ツールの荷重を検出する力センサとは、研磨や面取りなど、荷重によって加工を制御するためのセンサである。
【0010】
本発明は、このような課題に鑑み、ツールの荷重を検出する力センサの故障を簡単な構成かつ短時間にて検出することができるロボットを提供することを目的としている。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
歯車加工装置
19日前
株式会社不二越
歯車寸法測定装置
11日前
株式会社不二越
ロボット制御システム
9日前
株式会社不二越
ロボット制御システム
17日前
株式会社不二越
判定装置及びプログラム
18日前
株式会社不二越
熱処理装置及び金属製部材製造方法
3日前
株式会社不二越
内歯車加工用ブローチおよびその製造方法
1か月前
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
株式会社フジキン
レンチ
6か月前
日東精工株式会社
搬送装置
16日前
株式会社ツノダ
挟持工具
2か月前
株式会社ツノダ
挟持工具
1か月前
個人
ペットボトル用蓋開け具。
5か月前
UTM株式会社
搬送装置
5か月前
川崎重工業株式会社
ハンド
7か月前
株式会社右川ゴム製造所
把持装置
25日前
川崎重工業株式会社
ハンド
2か月前
川崎重工業株式会社
ハンド
7か月前
個人
ロボットシステム
4か月前
オムロン株式会社
搬送システム
7か月前
学校法人立命館
グリッパ
7か月前
トヨタ自動車株式会社
関節機構
4か月前
オムロン株式会社
ロボット装置
7か月前
学校法人立命館
グリッパ
1か月前
株式会社不二越
ロボット
4か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社マキタ
電動工具
7か月前
株式会社不二越
ロボット
6か月前
学校法人立命館
ロボットハンド
1か月前
個人
作業台
5か月前
学校法人立命館
箸グリッパ
7か月前
川崎重工業株式会社
整列システム
7か月前
オムロン株式会社
ロボットハンド
6か月前
個人
プーリーキー抜き治具
1か月前
川崎重工業株式会社
ロボット
6か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ