TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024049532
公報種別
公開特許公報(A)
公開日
2024-04-10
出願番号
2022155808
出願日
2022-09-29
発明の名称
ロボット制御システム
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
19/06 20060101AFI20240403BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数のロボットを同期させて使用する際、調整に要する時間を短縮し、ロボットの動作速度を落とすことなく動作制御し、容易に取り扱うことができるようにする。
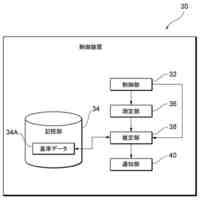
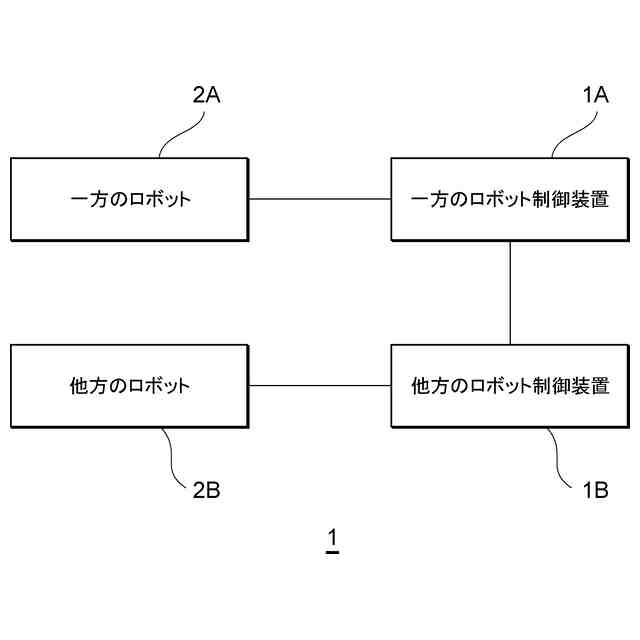
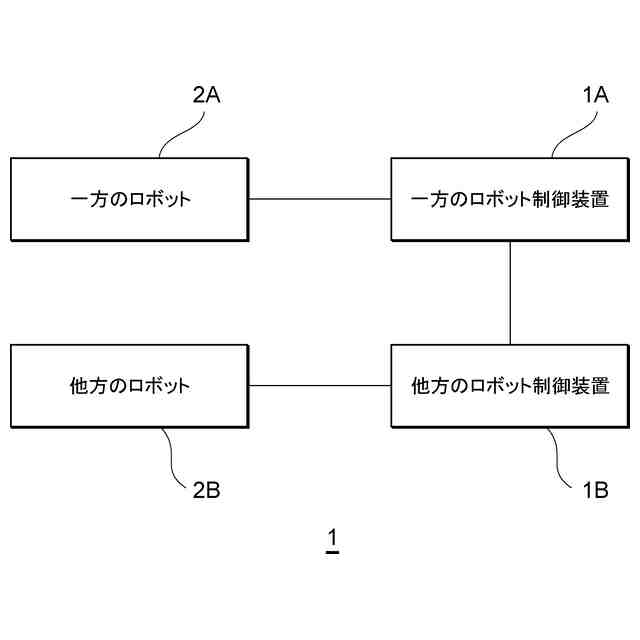
【解決手段】一方のロボット2Aと、他方のロボット2Bと、一方のロボット2Aを動作制御するとともに、一方のロボット2Aの位置を算出し、算出した位置を示す位置情報を送信する一方のロボット制御装置1Aと、一方のロボット制御装置1Aから受信した位置情報に基づき、他方のロボット2Bを、一方のロボット2Aと協調動作するように動作制御する他方のロボット制御装置1Bと、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
一方のロボットと、
他方のロボットと、
前記一方のロボットを動作制御するとともに、前記一方のロボットの位置を算出し、算出した位置を示す位置情報を送信する一方のロボット制御装置と、
前記一方のロボット制御装置から受信した前記位置情報に基づき、前記他方のロボットを、前記一方のロボットと協調動作するように動作制御する他方のロボット制御装置と、
を備えることを特徴とするロボット制御システム。
続きを表示(約 470 文字)
【請求項2】
前記一方のロボットは、当該一方のロボットを駆動する一方のアクチュエータの特定状態を検出し、検出した当該特定状態を示す状態情報を前記一方のロボット制御装置に送信する検出器を更に備え、
前記一方のロボット制御装置は、前記検出器から受信した前記状態情報に基づき、前記一方のロボットの位置を算出することを特徴とする請求項1に記載のロボット制御システム。
【請求項3】
前記一方のロボットに、前記一方のアクチュエータ及び前記検出器が複数個存在し、
各前記検出器は、各一方のアクチュエータの各状態をそれぞれ検出し、検出した各状態を示す各状態情報を、それぞれ前記一方のロボット制御装置に送信し、
前記一方のロボット制御装置は、各検出器から受信した各状態情報に基づき、前記位置を算出することを特徴とする請求項2に記載のロボット制御システム。
【請求項4】
前記一方のロボット制御装置は、前記位置情報をIO信号として送信することを特徴とする請求項1又は2に記載のロボット制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数のロボットの動作制御を行うロボット制御システムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、ロボットの動作制御に関する様々な発明が提案されている。例えば下記特許文献1には、ロボットの動作制御に用いる座標系を補正するロボット制御システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開平04-174005号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、複数のロボットの動作を同期させるためには、主に2つの方法がある。第一の方法は、各ロボットに対して、動作を細かく分けてティーチし、インタロックを挟んだり低速で動作させたりする方法である。第二の方法は、複数のロボットを協調制御する方法である。
【0005】
上記第一の方法においては、動作を細かく分けてティーチするため、調整に長い時間を要するうえ、ロボットの動作を遅くしなければならず、タクトタイムと精度の両立が困難であった。
【0006】
また、上記第二の方法においては、協調制御を行う複数のロボットを、1つの制御装置にて動かすため、各ロボットの制御出力用のアンプを1つの制御装置に組み込む必要があり、制御装置が大型化してしまう。このため、制御装置を持ち運ぶ際などに取り扱いが不便であるという問題があった。
【0007】
そこで本発明は、上記問題に鑑み、複数のロボットを同期させて使用する際、調整に要する時間を短縮し、ロボットの動作速度を落とすことなく動作制御することができ、さらに、容易に取り扱うことができるロボット制御システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明のロボット制御システムは、一方のロボットと、他方のロボットと、前記一方のロボットを動作制御するとともに、前記一方のロボットの位置を算出し、算出した位置を示す位置情報を送信する一方のロボット制御装置と、前記一方のロボット制御装置から受信した前記位置情報に基づき、前記他方のロボットを、前記一方のロボットと協調動作するように動作制御する他方のロボット制御装置と、を備える。
【0009】
また、前記一方のロボットは、当該一方のロボットを駆動する一方のアクチュエータの特定状態を検出し、検出した当該特定状態を示す状態情報を前記一方のロボット制御装置に送信する検出器を更に備え、前記一方のロボット制御装置は、前記検出器から受信した前記状態情報に基づき、前記一方のロボットの位置を算出する。
【0010】
また、前記一方のロボットに、前記一方のアクチュエータ及び前記検出器が複数個存在し、各前記検出器は、各一方のアクチュエータの各状態をそれぞれ検出し、検出した各状態を示す各状態情報を、それぞれ前記一方のロボット制御装置に送信し、前記一方のロボット制御装置は、各検出器から受信した各状態情報に基づき、前記位置を算出する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
28日前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
1か月前
個人
ロボットシステム
4か月前
学校法人立命館
グリッパ
1か月前
学校法人立命館
ロボットハンド
2か月前
株式会社不二越
ロボット
4か月前
個人
プーリーキー抜き治具
1か月前
株式会社不二越
予測システム
2か月前
東京都公立大学法人
ロボットハンド
2日前
CKD株式会社
電動把持装置
7日前
工機ホールディングス株式会社
作業機
3か月前
株式会社共和製作所
ロボット用アーム
15日前
株式会社ダイヘン
画像生成装置
1か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社越智工業所
ブレーカ用カバー
4か月前
株式会社ダイヘン
情報処理装置
1か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社ダイヘン
画像生成装置
1か月前
工機ホールディングス株式会社
作業機
3か月前
個人
スロープバリビス-ビス&-ドライバー
今日
工機ホールディングス株式会社
作業機
2か月前
株式会社中村製作所
トルクドライバー
2か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社不二越
ロボットシステム
4か月前
西部電機株式会社
吸着装置
29日前
西部電機株式会社
吸着装置
29日前
株式会社豆蔵
ロボットハンド
1か月前
オークマ株式会社
ロボット用架台
今日
株式会社マキタ
電動工具
1か月前
株式会社テス
あと施工アンカーの撤去装置
2か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ