TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024060312
公報種別
公開特許公報(A)
公開日
2024-05-02
出願番号
2022167616
出願日
2022-10-19
発明の名称
電動把持装置
出願人
CKD株式会社
代理人
個人
,
個人
主分類
B25J
15/00 20060101AFI20240424BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】好適にセルフロックできる電動把持装置を提供すること。
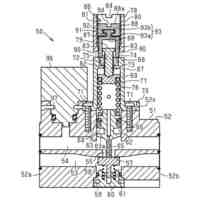
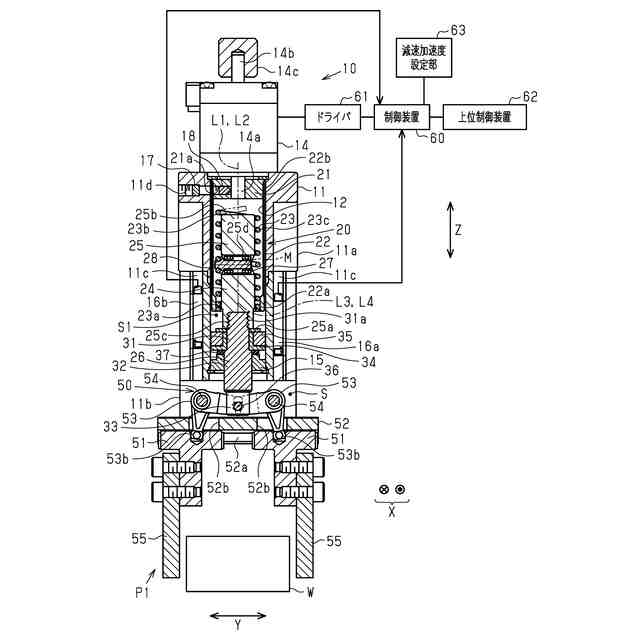
【解決手段】電動把持装置10は、コイルバネ23とフォロワ28の接触箇所と、コイルバネ23の第1端23aとの間でコイルバネ23を圧縮させることで一対の把持爪55によるワークWの把持を維持するセルフロックを可能とする。コイルバネ23とフォロワ28とが接触したときの摩擦係数をμとし、一対の把持爪55によってワークWを把持した場合にフォロワ28がコイルバネ23から受ける力の方向と、コイルバネ23とフォロワ28との接触箇所における垂直抗力の方向との間の角度をθとした場合に、電動把持装置10は、セルフロックの状態で、μ>tanθの関係式を満たすように構成されている。電動把持装置10では、接触箇所とコイルバネ23の第1端23aとの間でのコイルバネ23の圧縮に伴って、コイルバネ23を傾かせることにより角度θをゼロとする。
【選択図】図8
特許請求の範囲
【請求項1】
モータ軸を有するモータと、
線材を螺旋状に巻いて形成され、前記モータ軸と一体に回転する回転部材に固定されたコイルバネと、
前記コイルバネの内側に配置され、前記コイルバネの中心軸線に沿う軸方向に移動する作動軸と、
前記作動軸の周面から突出するフォロワであって、前記フォロワの中心軸線を前記作動軸の中心軸線に対し交差させて設けられるとともに、前記フォロワの中心軸線を回転中心として回転可能に前記作動軸に支持され、前記軸方向に隣り合う前記線材の隙間に前記作動軸の周面からの突出部が配置された前記フォロワと、
前記作動軸の端部に連結される把持爪開閉機構であって、前記軸方向への前記作動軸の移動により一対の把持爪を開閉させ、かつ前記作動軸の中心軸線を回転中心とした前記作動軸の回転を規制する前記把持爪開閉機構と、
前記モータを制御する制御装置と、を有し、
前記コイルバネと前記フォロワとの接触箇所と、前記コイルバネと前記回転部材との固定端との間で前記コイルバネを圧縮させることで、前記一対の把持爪によるワークの把持を維持するセルフロックを可能とし、
前記コイルバネと前記フォロワとが接触したときの摩擦係数をμとし、前記一対の把持爪によって前記ワークを把持した場合に前記フォロワが前記コイルバネから受ける力の方向と、前記接触箇所における垂直抗力の方向との間の角度をθとした場合に、前記セルフロックの状態で、μ>tanθの関係式を満たすように構成されるとともに、前記接触箇所と前記固定端との間での前記コイルバネの圧縮に伴って、前記コイルバネを傾かせることにより前記角度θをゼロとすることを特徴とする電動把持装置。
続きを表示(約 1,100 文字)
【請求項2】
前記作動軸は、前記フォロワを回転可能に支持するベアリングを有する請求項1に記載の電動把持装置。
【請求項3】
前記回転部材は、前記コイルバネを外側から囲む円筒状の保護部材であり、
前記保護部材の第1端部には、前記コイルバネの第1端が前記固定端として固定されるとともに、前記コイルバネの第2端は自由端とされ、
前記保護部材の第2端部における内側には取付部材が固定されるとともに、前記取付部材には前記モータ軸が連結されている請求項1又は請求項2に記載の電動把持装置。
【請求項4】
前記作動軸は、前記フォロワを支持する作動軸本体と、前記把持爪開閉機構と連結されるロッドとを連結して形成され、
前記取付部材と、前記保護部材と、前記コイルバネと、前記作動軸本体とを一体化したユニット部を有する請求項3に記載の電動把持装置。
【請求項5】
前記作動軸には支持部材が固定され、当該支持部材は、前記保護部材の内周面に摺接する請求項3に記載の電動把持装置。
【請求項6】
前記コイルバネは、前記保護部材と前記支持部材との間で前記軸方向に圧縮されている請求項5に記載の電動把持装置。
【請求項7】
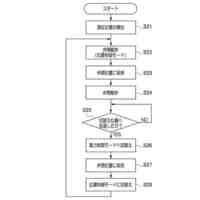
前記制御装置には、前記モータを作動させるドライバが信号接続されるとともに、前記軸方向での前記作動軸の位置を検出する位置検出センサが信号接続され、前記位置検出センサは、前記一対の把持爪による前記ワークの把持を開始する時点で、前記軸方向での前記作動軸の位置を検出した旨の把持開始信号を前記制御装置に出力し、前記制御装置は、前記把持開始信号を入力すると前記一対の把持爪による前記ワークの把持力を高めるために前記ドライバを制御する請求項1又は請求項2に記載の電動把持装置。
【請求項8】
前記制御装置は、前記把持開始信号を入力すると前記モータを減速させつつ、予め決められた回転量で前記モータが作動した後、前記モータを停止させるべく前記ドライバを制御する請求項7に記載の電動把持装置。
【請求項9】
前記制御装置には、前記モータを減速させる際の回転速度を複数の減速加速度に調節する減速加速度設定部が信号接続されている請求項8に記載の電動把持装置。
【請求項10】
前記制御装置は、前記モータが停止した時点で、前記軸方向での前記作動軸の位置を検出した旨の信号が入力されていない場合、前記ワークが無いことを示すエラー信号を出力する請求項8に記載の電動把持装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動把持装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
図15に示すように、例えば特許文献1に開示の電動ハンド90は、第1のフィンガー91と、第2のフィンガー92と、ハウジング93と、ナット94と、駆動軸95と、第1の揺動アーム96と、第2の揺動アーム97と、ばね部材98と、電動モータ99と、を有する。
【0003】
ハウジング93には、ガイドレール93aが設けられている。ガイドレール93aは、第1のフィンガー91及び第2のフィンガー92の各々を案内する。ナット94は、ハウジング93に設けられた摺動孔93bに往復動自在に収容されている。ナット94の外周面と摺動孔93bの内周面には、互いに対向する平面部が形成されている。これら平面部は、ナット94の回り止め機構となっているとともに、送りナット機構を構成している。ナット94に設けられた雌ねじ部94aは、電動モータ99により回転されるねじ軸99aの雄ねじ部99bに結合されている。駆動軸95は、ナット94に設けられたガイド孔94bに軸方向に往復動自在に収容されている。
【0004】
駆動軸95は、ナット94とともにばね室100を形成している。第1の揺動アーム96は、ハウジング93内に揺動自在に支持されている。第1の揺動アーム96は、一端が駆動軸95に係合するとともに、他端が第1のフィンガー91に係合している。第2の揺動アーム97は、ハウジング93内に揺動自在に支持されている。第2の揺動アーム97は、一端が駆動軸95に係合するとともに、他端が第2のフィンガー92に係合している。
【0005】
ばね部材98は、ばね室100に収容されている。ばね部材98は、第1及び第2のフィンガー91,92の各々がワークに接触するまでは駆動軸95をナット94とともに駆動する。ばね部材98は、第1及び第2のフィンガー91,92の各々がワークを把持するときには弾性変形して第1及び第2のフィンガー91,92を付勢する。ワークは、付勢された第1のフィンガー91と第2のフィンガー92により把持されるため、電動モータ99を停止させた状態で、ワークを第1のフィンガー91と第2のフィンガー92により把持して搬送することができる。つまり、雄ねじ部99bと雌ねじ部94aとは、第1のフィンガー91と第2のフィンガー92とでワークを把持した場合にセルフロックを構成する。セルフロックにより、ワークから第1のフィンガー91と第2のフィンガー92が受ける反力によっては駆動軸95の位置が変化しない。
【先行技術文献】
【特許文献】
【0006】
特許第6277119号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1の電動ハンド90において、例えば、ワークを把持した際に受ける衝撃力によって、雄ねじ部99bと雌ねじ部94aとの接触箇所にかじり等が生じる場合がある。このようなかじり等によって、セルフロック時、雄ねじ部99bと雌ねじ部94aとの接触箇所に発生する摩擦係数が変化する。摩擦係数が変化すると、セルフロックが維持しにくくなる場合が生じるとともに、摩擦係数の変化によってセルフロックを解除できなくなる虞がある。
【課題を解決するための手段】
【0008】
上記問題点を解決するための電動把持装置は、モータ軸を有するモータと、線材を螺旋状に巻いて形成され、前記モータ軸と一体に回転する回転部材に固定されたコイルバネと、前記コイルバネの内側に配置され、前記コイルバネの中心軸線に沿う軸方向に移動する作動軸と、前記作動軸の周面から突出するフォロワであって、前記フォロワの中心軸線を前記作動軸の中心軸線に対し交差させて設けられるとともに、前記フォロワの中心軸線を回転中心として回転可能に前記作動軸に支持され、前記軸方向に隣り合う前記線材の隙間に前記作動軸の周面からの突出部が配置された前記フォロワと、前記作動軸の端部に連結される把持爪開閉機構であって、前記軸方向への前記作動軸の移動により一対の把持爪を開閉させ、かつ前記作動軸の中心軸線を回転中心とした前記作動軸の回転を規制する前記把持爪開閉機構と、前記モータを制御する制御装置と、を有し、前記コイルバネと前記フォロワとの接触箇所と、前記コイルバネと前記回転部材との固定端との間で前記コイルバネを圧縮させることで、前記一対の把持爪によるワークの把持を維持するセルフロックを可能とし、前記コイルバネと前記フォロワとが接触したときの摩擦係数をμとし、前記一対の把持爪によって前記ワークを把持した場合に前記フォロワが前記コイルバネから受ける力の方向と、前記接触箇所における垂直抗力の方向との間の角度をθとした場合に、前記セルフロックの状態で、μ>tanθの関係式を満たすように構成されるとともに、前記接触箇所と前記固定端との間での前記コイルバネの圧縮に伴って、前記コイルバネを傾かせることにより前記角度θをゼロとすることを要旨とする。
【0009】
電動把持装置について、前記作動軸は、前記フォロワを回転可能に支持するベアリングを有していてもよい。
電動把持装置について、前記回転部材は、前記コイルバネを外側から囲む円筒状の保護部材であり、前記保護部材の第1端部には、前記コイルバネの第1端が前記固定端として固定されるとともに、前記コイルバネの第2端は自由端とされ、前記保護部材の第2端部における内側には取付部材が固定されるとともに、前記取付部材には前記モータ軸が連結されていてもよい。
【0010】
電動把持装置について、前記作動軸は、前記フォロワを支持する作動軸本体と、前記把持爪開閉機構と連結されるロッドとを連結して形成され、前記取付部材と、前記保護部材と、前記コイルバネと、前記作動軸本体とを一体化したユニット部を有していてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
CKD株式会社
減圧弁
1か月前
CKD株式会社
流体制御弁
23日前
CKD株式会社
電動把持装置
16日前
CKD株式会社
遠隔支援システム
3日前
CKD株式会社
電磁弁マニホールド
3日前
CKD株式会社
トレイパック製造装置
11日前
個人
釘抜き機
6か月前
株式会社フジキン
レンチ
7か月前
個人
ねじ締め装置
5か月前
日東精工株式会社
搬送装置
1か月前
株式会社ツノダ
挟持工具
1か月前
個人
繋がるハンドル付き工具。
8か月前
UTM株式会社
搬送装置
5か月前
個人
ペットボトル用蓋開け具。
6か月前
株式会社ツノダ
挟持工具
2か月前
川崎重工業株式会社
ハンド
3か月前
川崎重工業株式会社
ハンド
8か月前
株式会社右川ゴム製造所
把持装置
1か月前
川崎重工業株式会社
ハンド
8か月前
川崎重工業株式会社
ロボット
8か月前
個人
ロボットシステム
5か月前
株式会社不二越
ロボット
7か月前
トヨタ自動車株式会社
関節機構
5か月前
学校法人立命館
ロボットハンド
2か月前
オムロン株式会社
搬送システム
8か月前
株式会社マキタ
電動工具
8か月前
学校法人立命館
グリッパ
8か月前
株式会社不二越
ロボット
5か月前
オムロン株式会社
ロボット装置
7か月前
トヨタ自動車株式会社
関節機構
5か月前
株式会社マキタ
動力工具
9か月前
学校法人立命館
グリッパ
2か月前
株式会社トプコン
基準点指定装置
9か月前
株式会社トプコン
基準点指定装置
9か月前
オムロン株式会社
ロボットハンド
7か月前
株式会社マキタ
多軸締付機
8か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ