TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023134107
公報種別
公開特許公報(A)
公開日
2023-09-27
出願番号
2022039463
出願日
2022-03-14
発明の名称
ロボット装置
出願人
オムロン株式会社
代理人
個人
主分類
B25J
13/08 20060101AFI20230920BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットアームの移動を正確に行うことができるロボット装置を安価で実現する。
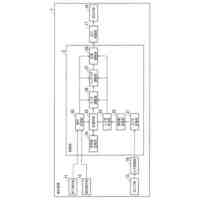
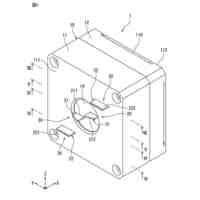
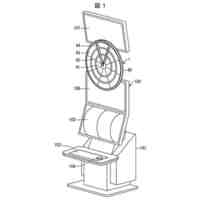
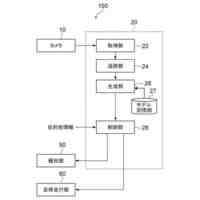
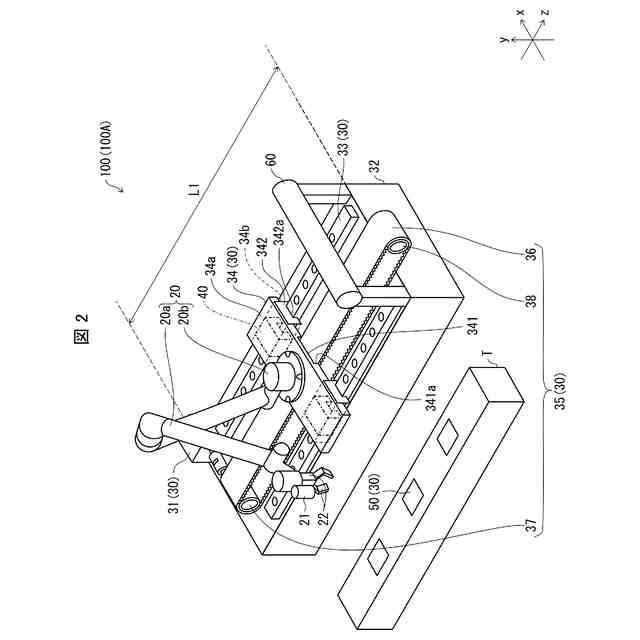
【解決手段】ロボット装置(100)は、ステージに支持されカメラ(21)が設けられたロボットアーム(20)と、ステージを移動させるためのベルトと、ステージの位置及びロボットアーム(20)を制御するロボット装置制御部(10)と、を備え、ロボット装置制御部(10)は、ステージを目的位置に移動させる場合に、ステージを当該目的位置付近に移動させてから、カメラ(21)が撮影した画像を参照し、更にステージの位置を調整することによって、ステージを目的位置に移動させる。
【選択図】図1
特許請求の範囲
【請求項1】
移動可能なステージに支持されたロボットアームであって、カメラが設けられたロボットアームと、
前記ステージを移動させるための搬送部と、
前記ステージの位置及び前記ロボットアームを制御する制御部と、を備え、
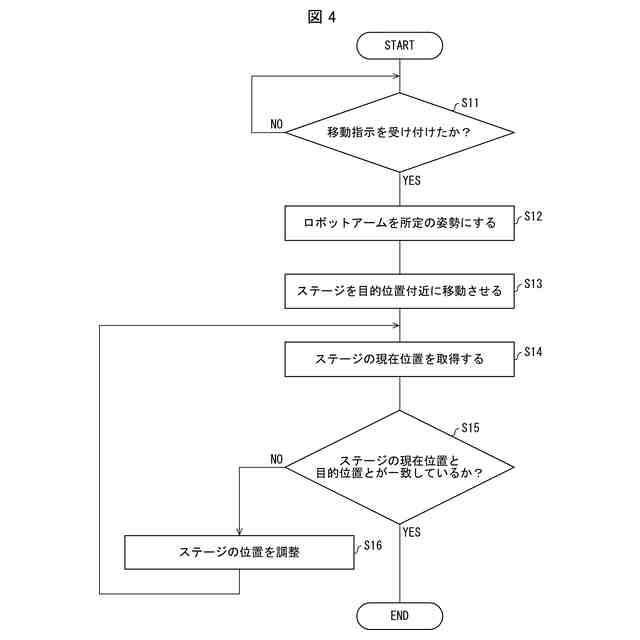
前記制御部は、前記ステージを目的位置に移動させる場合に、
前記ステージを前記目的位置付近に移動させてから、
前記カメラが撮影した画像を参照して、更に前記ステージの位置を調整することによって、前記ステージを前記目的位置に移動させる、ロボット装置。
続きを表示(約 740 文字)
【請求項2】
前記制御部は、前記ステージを目的位置に移動させる場合に、前記ロボットアームを所定の姿勢に制御する、請求項1に記載のロボット装置。
【請求項3】
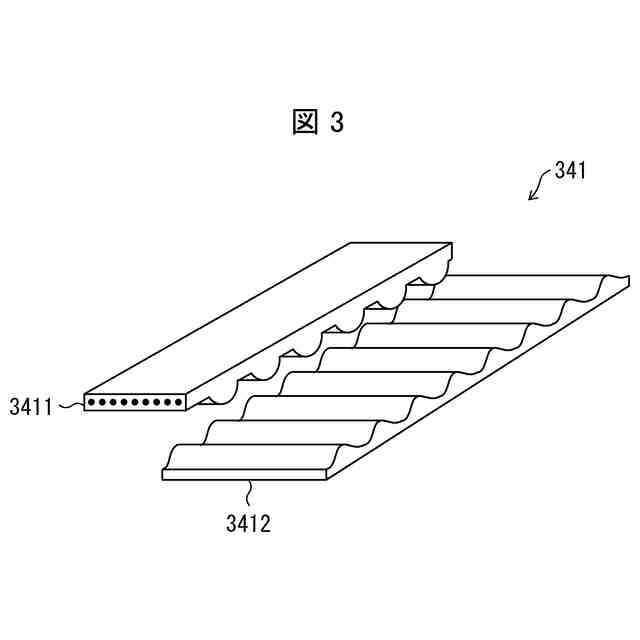
前記搬送部は、一対のプーリ間に懸架された無端ベルトである、請求項1または2に記載のロボット装置。
【請求項4】
移動可能なステージに支持されたロボットアームであって、カメラが設けられたロボットアームと、
前記ロボットアームを制御する制御部と、を備え、
前記ステージは、前記制御部が、前記ロボットアームの可動側の端部を固定させ、前記ロボットアームの動作を制御することによって、移動し、
前記制御部は、前記ステージを目的位置に移動させる場合に、
前記ステージを前記目的位置付近に移動させてから、
前記カメラが撮影した画像を参照して、更に前記ステージの位置を調整することによって、前記ステージを前記目的位置に移動させる、ロボット装置。
【請求項5】
前記カメラは、前記ロボットアームの可動側の端部に設けられている、請求項1から4のいずれか1項に記載のロボット装置。
【請求項6】
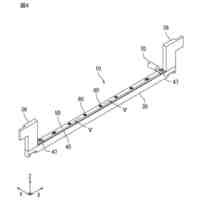
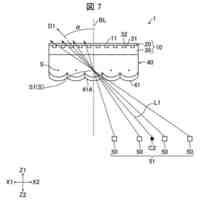
前記ステージの移動方向に沿って複数設けられたマーカを備え、
前記マーカには、前記複数のマーカのうちのいずれのマーカであるかを示す識別情報が表されている、請求項1から5のいずれか1項に記載のロボット装置。
【請求項7】
前記ステージをガイドするレールを備え、
前記ステージには、前記レールに対して前記ステージを固定させることが可能なブレーキが設けられている、請求項1から6の何れか1項に記載のロボット装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動可能なステージと、ステージに支持されるロボットアームとを備えるロボット装置に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
多関節のロボットアームは、様々な動作が可能であり、作業内容に応じて柔軟に対応することが可能である。そのため、工場等において様々な用途で利用されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-189392号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
移動可能なステージと、ステージに支持されたロボットアームとを備えるロボット装置も知られている。このようなステージを移動させる機構としては、ラックアンドピニオンが用いられている。精度の高いラックアンドピニオンを用いることでステージを正確に目的位置に移動させることができるためである。しかしながら、精度の高いラックアンドピニオンは高コストとなるという問題がある。
【0005】
本発明は、一側面では、このような実情を鑑みてなされたものであり、その目的は、ロボットアームの移動を正確に行うことができるロボット装置を安価で実現することにある。
【課題を解決するための手段】
【0006】
本開示は、上述の課題を解決するために、以下の構成を採用する。
【0007】
本開示の一側面に係るロボット装置は、移動可能なステージに支持されたロボットアームであって、カメラが設けられたロボットアームと、前記ステージを移動させるための搬送部と、前記ステージの位置及び前記ロボットアームを制御する制御部と、を備え、前記制御部は、前記ステージを目的位置に移動させる場合に、前記ステージを前記目的位置付近に移動させてから、前記カメラが撮影した画像を参照して、更に前記ステージの位置を調整することによって、前記ステージを前記目的位置に移動させる。
【0008】
上記構成によれば、ロボットアームを支持するステージを搬送部により移動させることができる。また、ロボットアームに設けられたカメラで撮影された画像を参照してステージ位置を調整するので、ステージを目的位置に正確に移動させることができる。その結果、ロボットアームの移動を正確に行うことができるロボット装置を安価で実現することができる。
【0009】
上記一側面に係るロボット装置において、前記制御部は、前記ステージを目的位置に移動させる場合に、前記ロボットアームを所定の姿勢に制御する。
【0010】
上記構成によれば、ロボットアームを安定させた状態でステージを移動させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
操作装置
18日前
オムロン株式会社
球体駆動装置
13日前
オムロン株式会社
電力変換装置
11日前
オムロン株式会社
表示システム
11日前
オムロン株式会社
非接触給電装置
4日前
オムロン株式会社
検査ソケットおよび検査装置
4日前
オムロン株式会社
検査ソケットおよび検査装置
11日前
オムロン株式会社
演出装置及びゲーミングマシン
13日前
オムロン株式会社
非接触給電装置及び電力伝送方法
4日前
オムロン株式会社
表示切替装置、車両用表示システム及び自動車
6日前
オムロン株式会社
情報処理装置、情報処理方法およびプログラム
4日前
オムロン株式会社
図柄変動表示装置、遊技機、および図柄変動表示方法
13日前
オムロン株式会社
作業員割当装置、作業員割当方法および作業員割当プログラム
5日前
オムロン株式会社
車両感知装置、感知信号生成方法、および感知信号生成プログラム
12日前
オムロン株式会社
電力制御装置、電力制御方法、電力制御プログラム及び電力制御システム
4日前
オムロン株式会社
酸素飽和度測定装置、酸素飽和度測定方法及び酸素飽和度測定プログラム
4日前
オムロン株式会社
酸素飽和度測定装置、酸素飽和度測定方法及び酸素飽和度測定プログラム
4日前
オムロン株式会社
スイッチ、スイッチアッセンブリ及び操作装置
17日前
オムロン株式会社
俯瞰データ生成装置、俯瞰データ生成プログラム、俯瞰データ生成方法、及びロボット
4日前
オムロン株式会社
俯瞰データ生成装置、学習装置、俯瞰データ生成プログラム、俯瞰データ生成方法、及びロボット
5日前
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
25日前
個人
ペットボトル用蓋開け具。
6か月前
UTM株式会社
搬送装置
5か月前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
1か月前
個人
ロボットシステム
4か月前
学校法人立命館
グリッパ
1か月前
学校法人立命館
ロボットハンド
2か月前
トヨタ自動車株式会社
関節機構
4か月前
トヨタ自動車株式会社
関節機構
5か月前
株式会社不二越
ロボット
4か月前
個人
プーリーキー抜き治具
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ