TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024059653
公報種別
公開特許公報(A)
公開日
2024-05-01
出願番号
2024015106,2023022034
出願日
2024-02-02,2023-02-15
発明の名称
俯瞰データ生成装置、学習装置、俯瞰データ生成プログラム、俯瞰データ生成方法、及びロボット
出願人
オムロン株式会社
,
国立大学法人京都大学
代理人
弁理士法人太陽国際特許事務所
主分類
G05D
1/243 20240101AFI20240423BHJP(制御;調整)
要約
【課題】静的なランドマークが検出されない状況であっても、動的な環境において観測装置を搭載した観測移動体からの視点で観測された2次元観測情報から、観測移動体の地面上の移動軌跡、及び移動体の各々の地面上の移動軌跡を表す俯瞰データを生成することができる。
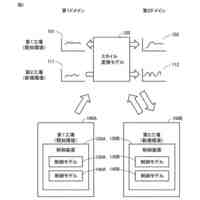
【解決手段】俯瞰データ生成装置は、動的な環境において観測装置を搭載した観測移動体からの視点で観測された少なくとも1つの移動体を表す2次元観測情報の時系列データを取得する取得部22と、前記観測移動体の地面上の動き、及び前記移動体の各々の地面上の動きを推定する学習済みモデルを用いて、前記2次元観測情報の時系列データから、前記観測移動体を俯瞰した位置から観測した場合に得られる、前記観測移動体の地面上の移動軌跡、及び前記移動体の各々の地面上の移動軌跡を表す俯瞰データを生成する生成部26と、を含む。
【選択図】図1
特許請求の範囲
【請求項1】
動的な環境において観測装置を搭載した観測移動体からの視点で観測された少なくとも1つの移動体を表す2次元観測情報の時系列データを取得する取得部と、
前記観測移動体の地面上の動き、及び前記移動体の各々の地面上の動きを推定する学習済みモデルを用いて、
前記2次元観測情報の時系列データから、前記観測移動体を俯瞰した位置から観測した場合に得られる、前記観測移動体の地面上の移動軌跡、及び前記移動体の各々の地面上の移動軌跡を表す俯瞰データを生成する生成部と、
を含む俯瞰データ生成装置。
続きを表示(約 2,300 文字)
【請求項2】
前記生成部は、
前記観測移動体の地面上の動き、及び前記移動体の各々の地面上の動きの分布を推定する学習済みモデルを用いて、
前記2次元観測情報の時系列データから、前記観測移動体を俯瞰した位置から観測した場合に得られる、前記観測移動体の地面上の移動軌跡、及び前記移動体の各々の地面上の位置分布を表す移動軌跡を表す俯瞰データを生成する請求項1記載の俯瞰データ生成装置。
【請求項3】
前記2次元観測情報の時系列データから、前記移動体の各々を追跡し、前記2次元観測情報上の前記移動体の各々の各時刻の位置及び大きさを取得する追跡部を更に含み、
前記生成部は、前記2次元観測情報上の前記移動体の各々の各時刻の位置及び大きさを入力として、前記観測移動体の地面上の動き、及び前記移動体の各々の地面上の動きを推定する前記学習済みモデルを用いて、前記俯瞰データを生成する請求項1記載の俯瞰データ生成装置。
【請求項4】
前記学習済みモデルは、
前記移動体の各々の対象時刻の位置及び大きさを入力とし、ベクトルを出力する第1エンコーダと、
一時刻前について得られた、前記観測移動体の地面上の動き、及び前記移動体の各々の地面上の動きを入力とし、ベクトルを出力する第2エンコーダと、
前記第1エンコーダによって出力された前記ベクトル、及び前記第2エンコーダによって出力された前記ベクトルを入力とし、前記対象時刻についての前記観測移動体の地面上の動き、及び前記移動体の各々の地面上の動きを出力するデコーダとを含む請求項3記載の俯瞰データ生成装置。
【請求項5】
動的な環境において観測装置を搭載した観測移動体からの視点で観測された少なくとも1つの移動体を表す2次元観測情報上の前記移動体の各々の各時刻の位置及び大きさの時系列データと、前記観測移動体の地面上の動き、及び前記移動体の各々の地面上の動きの時系列データとの組み合わせを教師データとして取得する取得部と、
前記教師データに基づいて、前記2次元観測情報上の前記移動体の各々の各時刻の位置及び大きさを入力として、前記観測移動体の地面上の動き、及び前記移動体の各々の地面上の動きを推定するモデルを学習する学習部と、
を含む学習装置。
【請求項6】
前記モデルは、
前記移動体の各々の対象時刻の位置及び大きさを入力とし、ベクトルを出力する第1エンコーダと、
一時刻前について得られた、前記観測移動体の地面上の動き、及び前記移動体の各々の地面上の動きを入力とし、ベクトルを出力する第2エンコーダと、
前記第1エンコーダによって出力された前記ベクトル、及び前記第2エンコーダによって出力された前記ベクトルを入力とし、対象時刻についての前記観測移動体の地面上の動き、及び前記移動体の各々の地面上の動きを出力するデコーダとを含む請求項5記載の学習装置。
【請求項7】
動的な環境において観測装置を搭載した観測移動体からの視点で観測された少なくとも1つの移動体を表す2次元観測情報の時系列データを取得する取得部と、
前記観測移動体の地面上の動き、及び前記移動体の各々の地面上の動きを予測する学習済みモデルを用いて、
前記2次元観測情報の時系列データから、前記観測移動体を俯瞰した位置から観測した場合に得られる、前記観測移動体の地面上の移動軌跡、及び前記移動体の各々の地面上の移動軌跡を表す俯瞰データの予測結果を生成する生成部と、
を含む俯瞰データ生成装置。
【請求項8】
前記生成部は、
前記観測移動体の地面上の動き、及び前記移動体の各々の地面上の動きの分布を予測する学習済みモデルを用いて、
前記2次元観測情報の時系列データから、前記観測移動体を俯瞰した位置から観測した場合に得られる、前記観測移動体の地面上の移動軌跡、及び前記移動体の各々の地面上の位置分布を表す移動軌跡を表す俯瞰データの予測結果を生成する請求項7記載の俯瞰データ生成装置。
【請求項9】
コンピュータに、
動的な環境において観測装置を搭載した観測移動体からの視点で観測された少なくとも1つの移動体を表す2次元観測情報の時系列データを取得する取得工程と、
前記観測移動体の地面上の動き、及び前記移動体の各々の地面上の動きを推定する学習済みモデルを用いて、
前記2次元観測情報の時系列データから、前記観測移動体を俯瞰した位置から観測した場合に得られる、前記観測移動体の地面上の移動軌跡、及び前記移動体の各々の地面上の移動軌跡を表す俯瞰データを生成する生成工程と、
を含む処理を実行させるための俯瞰データ生成プログラム。
【請求項10】
コンピュータが、
動的な環境において観測装置を搭載した観測移動体からの視点で観測された少なくとも1つの移動体を表す2次元観測情報の時系列データを取得する取得工程と、
前記観測移動体の地面上の動き、及び前記移動体の各々の地面上の動きを推定する学習済みモデルを用いて、
前記2次元観測情報の時系列データから、前記観測移動体を俯瞰した位置から観測した場合に得られる、前記観測移動体の地面上の移動軌跡、及び前記移動体の各々の地面上の移動軌跡を表す俯瞰データを生成する生成工程と、
を含む処理を実行する俯瞰データ生成方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、俯瞰データ生成装置、学習装置、俯瞰データ生成プログラム、俯瞰データ生成方法、及びロボットに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来より、一人称視点で撮影された映像で観測した人物骨格に基づき、俯瞰視点での人物位置分布を推定する技術が知られている(非特許文献1)。
【0003】
また、静的なランドマーク基準の自己位置推定(Simultaneously Localization and Mapping:SLAM)の最適化対象に移動体を加えて逐次最適化を行う技術が知られている(非特許文献2)。
【0004】
また、GNSS(Global Navigation Satellite System)により位置を推定する技術が知られている(非特許文献3)。
【0005】
また、俯瞰視点映像中における一人称映像の撮影位置を推定する技術が知られている(特許文献1)。この技術では、推定のために俯瞰視点及び一人称視点の両視点から抽出された動き特徴の照合を行っている。
【先行技術文献】
【非特許文献】
【0006】
"MonoLoco: Monocular 3D Pedestrian Localization and Uncertainty Estimation",インターネット検索<URL: https://arxiv.org/abs/1906.06059>, Jun 2019
"CubeSLAM: Monocular 3D Object SLAM",インターネット検索<URL: https://arxiv.org/abs/1806.00557>,Jun 2018
「フィールドロボティクスの現状と展望」、インターネット検索<URL: https://committees.jsce.or.jp/opcet_sip/system/files/0130_01.pdf>
【特許文献】
【0007】
特開2021-77287号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上記非特許文献1記載の技術では、観測カメラの運動や周辺の移動体の移動軌跡を復元することはできない。
【0009】
また、上記非特許文献2記載の技術は、移動体と共に静的なランドマークが安定して観測可能な環境でしか適用できない。また、移動体の動きモデルが単純な剛体運動に限られ、相互作用を考慮した移動体の動きに対応できない。
【0010】
また、上記非特許文献3記載の技術では、GNSSを搭載した装置自身の自己位置の復元のみを対象とし、周辺の移動体の位置を復元できない。また、高層ビルなどによる遮蔽が生じる環境では、GPS(Global Positioning System)電波の受信が不安定となり、位置復元結果が不正確となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
操作装置
1か月前
オムロン株式会社
展示装置
7日前
オムロン株式会社
操作装置
7日前
オムロン株式会社
コイル部品
6日前
オムロン株式会社
表示システム
26日前
オムロン株式会社
電力変換装置
26日前
オムロン株式会社
球体駆動装置
28日前
オムロン株式会社
異物検出装置
8日前
オムロン株式会社
非接触給電装置
19日前
オムロン株式会社
転落検知システム
1か月前
オムロン株式会社
ロボットシステム
今日
オムロン株式会社
ロボットシステム
今日
オムロン株式会社
表示装置及び遊技機
今日
オムロン株式会社
開発装置、開発方法
6日前
オムロン株式会社
測定装置及び測定方法
今日
オムロン株式会社
遊技機の操作ボタン装置
1か月前
オムロン株式会社
遊技機の操作ボタン装置
1か月前
オムロン株式会社
遊技機の操作ボタン装置
1か月前
オムロン株式会社
検査ソケットおよび検査装置
19日前
オムロン株式会社
検査ソケットおよび検査装置
26日前
オムロン株式会社
制御システムおよび制御方法
6日前
オムロン株式会社
演出装置及びゲーミングマシン
28日前
オムロン株式会社
自律作業システム及び自律作業機
1か月前
オムロン株式会社
システム、方法およびプログラム
11日前
オムロン株式会社
非接触給電装置及び電力伝送方法
19日前
オムロン株式会社
表示切替装置および表示システム
14日前
オムロン株式会社
非接触給電装置及び電力伝送用コイル
14日前
オムロン株式会社
縫製装置、縫製方法、及び縫製システム
1か月前
オムロン株式会社
制御装置、制御方法、及び制御プログラム
14日前
オムロン株式会社
画像処理装置、画像処理方法およびプログラム
14日前
オムロン株式会社
表示切替装置、車両用表示システム及び自動車
21日前
オムロン株式会社
情報処理装置、情報処理方法およびプログラム
19日前
オムロン株式会社
温調システム、異常判定方法および異常判定装置
6日前
オムロン株式会社
図柄変動表示装置、遊技機、および図柄変動表示方法
28日前
オムロン株式会社
作業員割当装置、作業員割当方法および作業員割当プログラム
20日前
国立研究開発法人産業技術総合研究所
振動ユニット及び駆動方法
14日前
続きを見る
他の特許を見る











 特許ウォッチ
特許ウォッチ