TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024053172
公報種別
公開特許公報(A)
公開日
2024-04-15
出願番号
2022159251
出願日
2022-10-03
発明の名称
自律作業システム及び自律作業機
出願人
オムロン株式会社
代理人
個人
主分類
H02J
7/00 20060101AFI20240408BHJP(電力の発電,変換,配電)
要約
【課題】自律作業機の充電ステーションへの接近方向の自由度を向上させる。
【解決手段】自律作業システムは、充電ステーションと自律作業機とを備える。充電ステーションは、無線給電の送電ユニットを含む。自律作業機は、走行体と、モータと、バッテリと、無線給電の受電ユニットとを含む。モータは、走行体を走行させる。バッテリは、モータに電力を供給する。自律作業機は、自律走行しながら所定の作業を実行し、充電ステーションに移動して無線給電によりバッテリを充電する。送電ユニットは、送電コイルを含む。送電コイルは、充電ステーションが置かれる設置面に対して平行に配置される。受電ユニットは、受電コイルを含む。受電コイルは、設置面に対して平行に配置される。自律作業機は、受電コイルが送電コイルの上方に位置するように充電ステーションに移動して、バッテリを充電する。
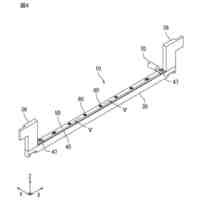
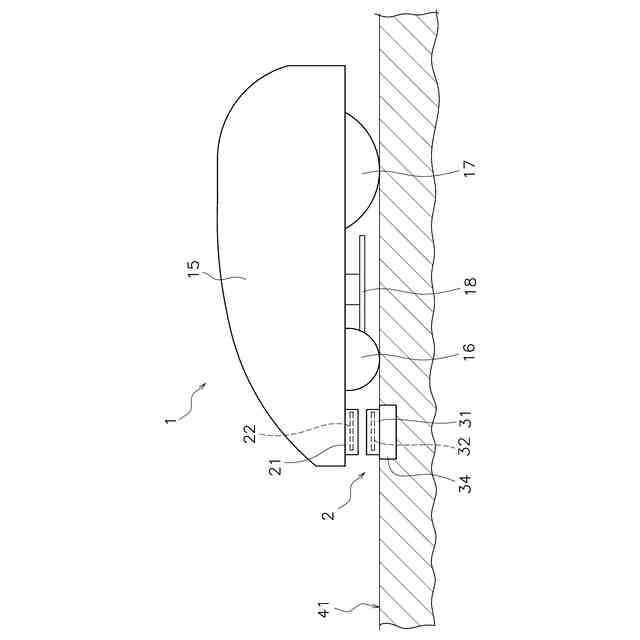
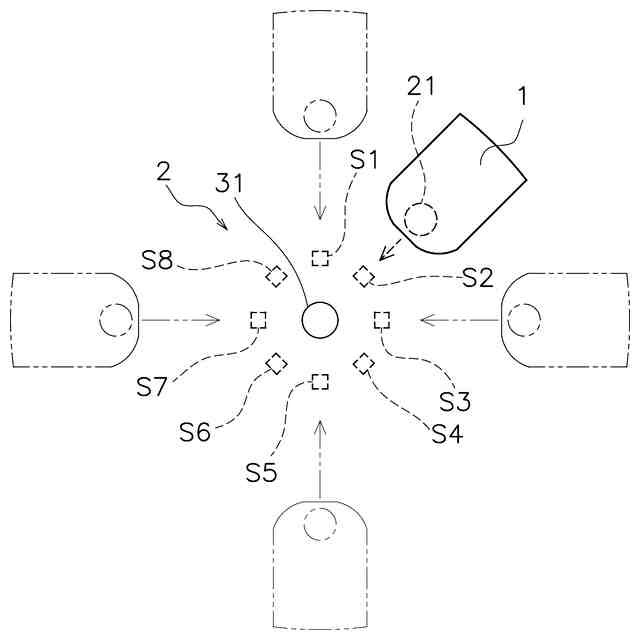
【選択図】図4
特許請求の範囲
【請求項1】
無線給電の送電ユニットを含む充電ステーションと、
走行体と、前記走行体を走行させるモータと、前記モータに電力を供給するバッテリと、前記無線給電の受電ユニットと、を含み、自律走行しながら所定の作業を実行し、前記充電ステーションに移動して前記無線給電により前記バッテリを充電する自律作業機と、
を備え、
前記送電ユニットは、前記充電ステーションが置かれる設置面に対して平行に配置される送電コイルを含み、
前記受電ユニットは、前記設置面に対して平行に配置される受電コイルを含み、
前記自律作業機は、前記受電コイルが前記送電コイルの上方に位置するように前記充電ステーションに移動して、前記バッテリを充電する、
自律作業システム。
続きを表示(約 1,200 文字)
【請求項2】
前記受電コイルは、前記走行体の底面に配置される、
請求項1に記載の自律作業システム。
【請求項3】
前記充電ステーションは、前記設置面の傾斜角度を検出するセンサを含み、
前記自律作業機は、
前記センサによって検出された傾斜角度を取得し、
前記傾斜角度に応じて前記充電ステーションへの接近方向を決定する、
請求項1に記載の自律作業システム。
【請求項4】
前記センサは、前記充電ステーションから複数の方向への前記設置面の傾斜角度を検出し、
前記自律作業機は、前記傾斜角度が最も小さい方向を、前記充電ステーションへの接近方向として決定する、
請求項3に記載の自律作業システム。
【請求項5】
前記充電ステーションは、前記設置面の傾斜角度を検出するセンサを含み、
前記自律作業機は、
前記送電コイルの位置に基づく目標位置を記憶しており、
前記バッテリを充電するときには、前記受電コイルが前記目標位置に配置されるように前記充電ステーションに移動し、
前記センサによって検出された傾斜角度を取得し、
前記傾斜角度に応じて、前記目標位置を補正する、
請求項1に記載の自律作業システム。
【請求項6】
前記自律作業機は、自動芝刈り機である、
請求項1に記載の自律作業システム。
【請求項7】
自律走行しながら所定の作業を実行し、充電ステーションから無線給電により充電される自律作業機であって、前記充電ステーションは、前記充電ステーションが置かれる設置面に対して平行に配置される送電コイルを含み、
走行体と、
前記走行体を走行させるモータと、
前記設置面に対して平行に配置される受電コイルと、
前記送電コイルと前記受電コイルとの間の無線給電により充電され、前記モータに電力を供給するバッテリと、
前記受電コイルが前記送電コイルの上方に位置するように、前記自律作業機を前記充電ステーションに移動させて、前記バッテリを充電するコントローラと、
を備える自律作業機。
【請求項8】
前記受電コイルは、前記走行体の底面に配置される、
請求項7に記載の自律作業機。
【請求項9】
前記コントローラは、
前記設置面の傾斜角度を取得し、
前記傾斜角度に応じて前記充電ステーションへの接近方向を決定する、
請求項7に記載の自律作業機。
【請求項10】
前記コントローラは、
前記充電ステーションから複数の方向への前記設置面の傾斜角度を取得し、
前記傾斜角度が最も小さい方向を、前記充電ステーションへの接近方向として決定する、
請求項7に記載の自律作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律作業システム及び自律作業機に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、自律走行して所定の作業を行う自律作業機と、この自律作業機を充電する充電ステーションとを備える自律作業システムが、知られている。例えば、特許文献1では、自律作業機は、自律走行して作業地の芝刈りを行う。作業地には、充電ステーションが配置されている。自律作業機は、充電ステーションと自律作業機とを電気的に接続するためのコネクタを備えている。コネクタは、自律作業機の前面に配置されている。自律作業機は、充電ステーションに向かって移動し、コネクタを充電ステーションに接続する。それにより、自律作業機が充電される。
【先行技術文献】
【特許文献】
【0003】
特開2022-064681号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した自律作業機では、コネクタが自律作業機の前面に配置されている。そのため、充電時には、自律作業機は、自律作業機側のコネクタが、充電ステーション側のコネクタに対して前後方向に正対するように、充電ステーションに向かって移動する。そのため、自律作業機の充電ステーションへの接近方向が限定されており、自律作業機を充電ステーションまでスムーズに移動させることは容易ではない。本発明の目的は、自律作業機の充電ステーションへの接近方向の自由度を向上させることにある。
【課題を解決するための手段】
【0005】
本発明の一態様に係る自律作業システムは、充電ステーションと自律作業機とを備える。充電ステーションは、無線給電の送電ユニットを含む。自律作業機は、走行体と、モータと、バッテリと、無線給電の受電ユニットとを含む。モータは、走行体を走行させる。バッテリは、モータに電力を供給する。自律作業機は、自律走行しながら所定の作業を実行し、充電ステーションに移動して無線給電によりバッテリを充電する。送電ユニットは、送電コイルを含む。送電コイルは、充電ステーションが置かれる設置面に対して平行に配置される。受電ユニットは、受電コイルを含む。受電コイルは、設置面に対して平行に配置される。自律作業機は、受電コイルが送電コイルの上方に位置するように充電ステーションに移動して、バッテリを充電する。
【0006】
本発明の他の態様に係る自律作業機は、自律走行しながら所定の作業を実行し、充電ステーションから無線給電により充電される。充電ステーションは、送電コイルを含む。送電コイルは、充電ステーションが置かれる設置面に対して平行に配置される。自律作業機は、走行体と、モータと、受電コイルと、バッテリと、コントローラとを備える。モータは、走行体を走行させる。受電コイルは、設置面に対して平行に配置される。バッテリは、送電コイルと受電コイルとの間の無線給電により充電され、モータに電力を供給する。コントローラは、受電コイルが送電コイルの上方に位置するように、自律作業機を充電ステーションに移動させて、バッテリを充電する。
【発明の効果】
【0007】
本発明によれば、受電コイルと送電コイルとは、充電ステーションの設置面に対して平行に配置される。自律作業機は、受電コイルが送電コイルの上方に位置するように充電ステーションに移動して、バッテリを充電する。そのため、充電ステーションに対して、様々な方向から接近して、受電コイルを送電コイルの上方に位置させることができる。それにより、自律作業機の充電ステーションへの接近方向の自由度が向上する。
【図面の簡単な説明】
【0008】
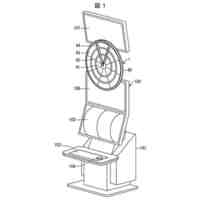
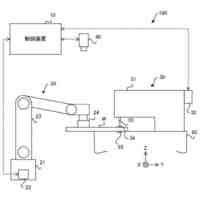
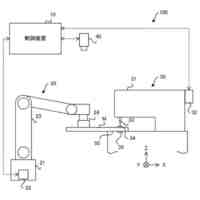
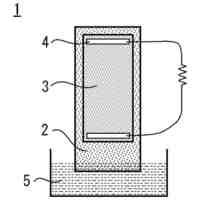
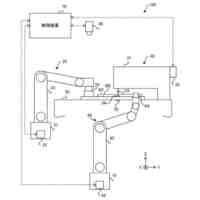
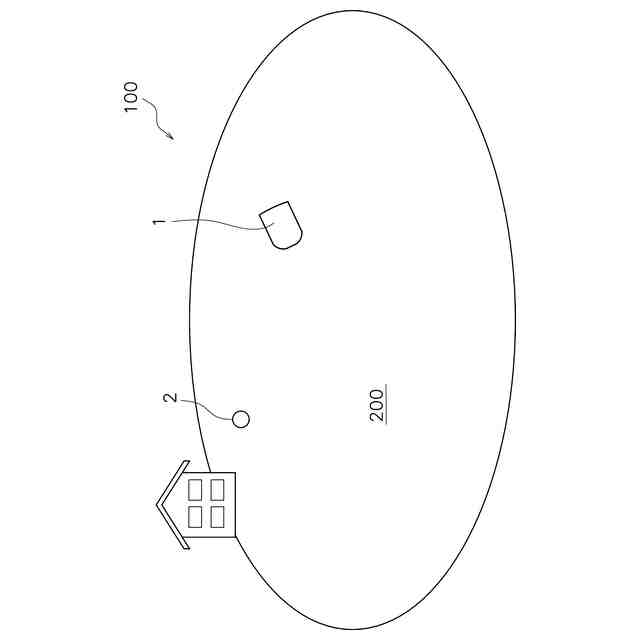
実施形態に係る自律作業システムと、自律作業システムが配置される作業エリアとを示す図である。
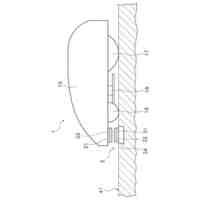
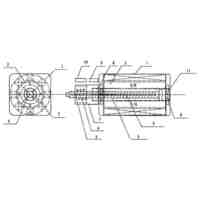
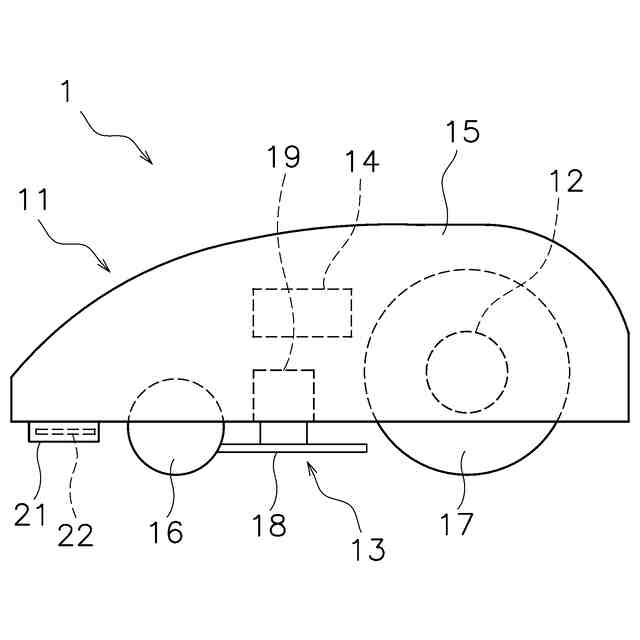
自律作業機の側面図である。
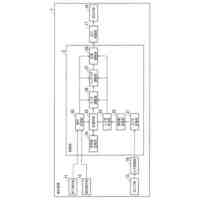
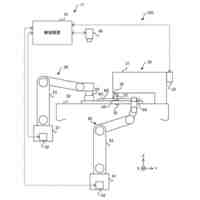
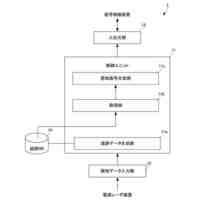
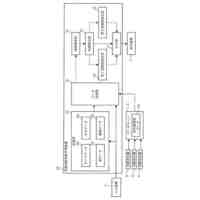
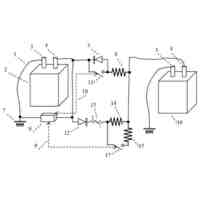
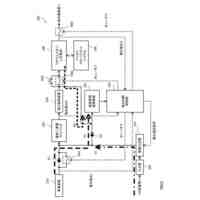
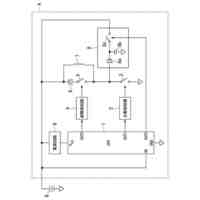
自律作業機と充電ステーションとの構成を示すブロック図である。
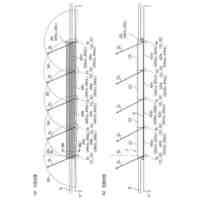
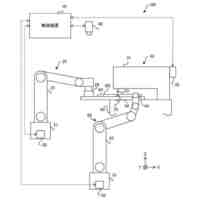
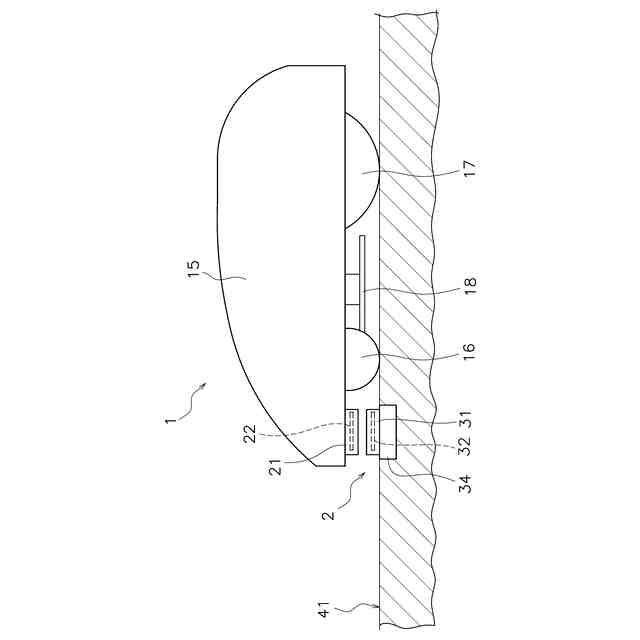
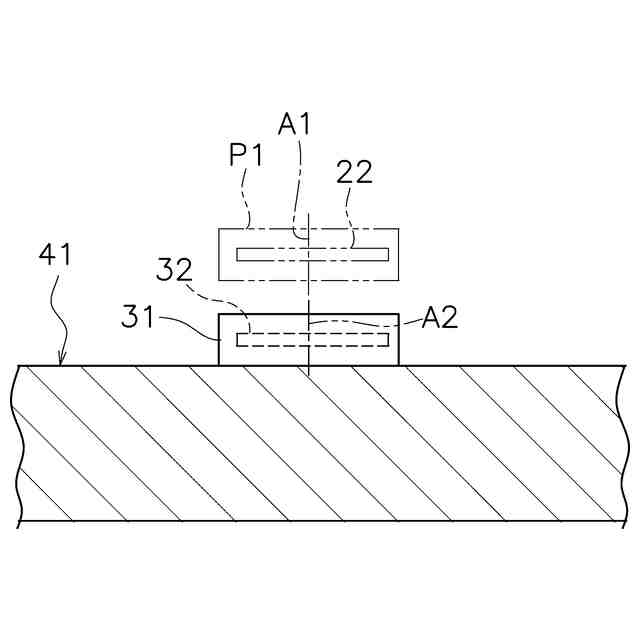
充電時の自律作業機と充電ステーションとを示す側面図である。
自律作業機と充電ステーションとの上面図である。
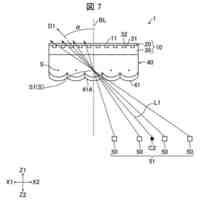
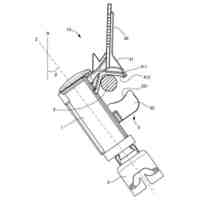
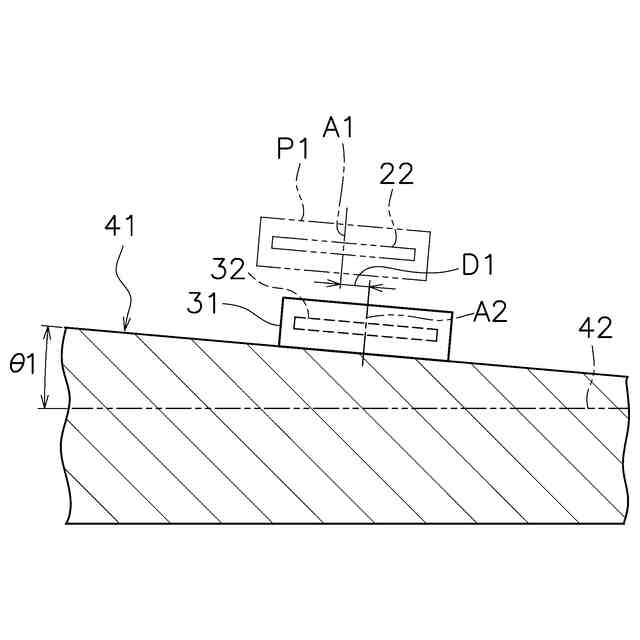
充電時の送電ユニットと、受電ユニットの目標位置とを示す側面図である。
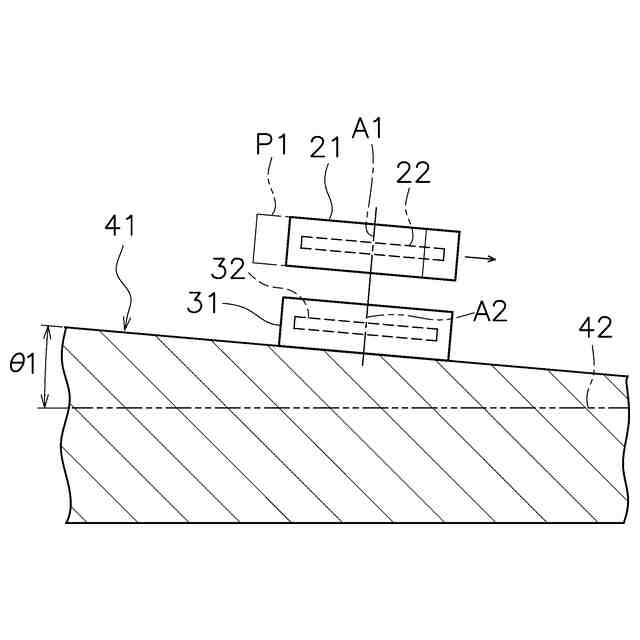
充電時の送電ユニットと、受電ユニットの補正された目標位置とを示す側面図である。
充電時の送電ユニットと受電ユニットとを示す側面図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して実施形態にかかる自律作業システムについて説明する。図1は、本実施形態に係る自律作業システム100と、自律作業システム100が配置される作業エリア200とを示す図である。自律作業システム100は、自律作業機1と充電ステーション2とを含む。自律作業機1は、屋外の作業エリア200の中を無人で自律走行しながら芝草を刈る自動芝刈り機である。
【0010】
充電ステーション2は、作業エリア200内に配置される。充電ステーション2は、自律作業機1に給電する。充電ステーション2は、非作業時における自律作業機1の待機場所でもある。自律作業機1は、作業の開始時には、充電ステーション2を出発して、作業エリア200内において芝刈り作業を行う。自律作業機1は、自動的に充電ステーション2に移動し、充電ステーション2で充電を受ける。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
操作装置
12日前
オムロン株式会社
表示システム
5日前
オムロン株式会社
球体駆動装置
7日前
オムロン株式会社
電力変換装置
5日前
オムロン株式会社
転落検知システム
12日前
オムロン株式会社
遊技機の操作ボタン装置
19日前
オムロン株式会社
検査ソケットおよび検査装置
5日前
オムロン株式会社
演出装置及びゲーミングマシン
7日前
オムロン株式会社
自律作業システム及び自律作業機
15日前
オムロン株式会社
縫製装置、縫製方法、及び縫製システム
14日前
オムロン株式会社
表示切替装置、車両用表示システム及び自動車
今日
オムロン株式会社
図柄変動表示装置、遊技機、および図柄変動表示方法
7日前
オムロン株式会社
車両感知装置、感知信号生成方法、および感知信号生成プログラム
6日前
オムロン株式会社
旅客流動混雑予測装置、旅客流動混雑予測方法および旅客流動混雑予測プログラム
14日前
オムロン株式会社
スイッチ、スイッチアッセンブリ及び操作装置
11日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
14日前
オムロン株式会社
縫製システム、制御方法、制御プログラム、制御装置、非一時的記憶媒体、及び縫製物製造方法
14日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
14日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
14日前
オムロン株式会社
縫製システム、制御装置、制御方法、制御プログラム、非一時的記憶媒体、及び縫製物製造方法
14日前
個人
2軸モーター
4日前
ニデック株式会社
モータ
19日前
個人
バッテリーの補助装置
12日前
ヨツギ株式会社
鳥害防止具
20日前
個人
磁力のみを動力とするモーター
13日前
個人
機械式トルク可変制御型電動機
27日前
株式会社プロテリアル
リニアモータ
20日前
株式会社ターネラ
発電蓄電装置
25日前
豊田合成株式会社
送電装置
22日前
株式会社アイドゥス企画
モータシリンダ
19日前
日産自動車株式会社
発電装置
12日前
株式会社ミツバ
回転電機
12日前
株式会社ミツバ
制動装置
5日前
因幡電機産業株式会社
ケーブル挿通具
25日前
オムロン株式会社
電力変換装置
5日前
富士電機株式会社
電力変換装置
今日
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ